Условие равновесия рычага Жуковского.
Если силы, действующие на звенья покоящегося механизма, перенести в одноименные точки плана скоростей, повернутого на 90°, то сумма моментов всех сил, вычисленных относительно начала плана скоростей, равна нулю: 
Полученное равенство представляет собой геометрический аналог принципа возможных перемещений.
Рычаг Жуковского можно строить для любого неравного нулю значения скорости начального звена (например для ω1=1 рад/с). Плечи сил измеряются на рычаге Жуковского в мм.
а

б



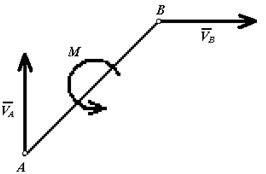
Рис. 2.3.7. Перенос момента на рычаг Жуковского:
а − пересчет момента; б− перенос момента в виде пары сил
Перенос момента на рычаг Жуковского. Если силы переносятся на повернутый план скоростей без изменения, то момент при переносе необходимо пересчитывать или заменять парой сил:
1. Пересчет момента при переносе. Если на звено АВ механизма действует момент М, то соответствующий ему момент, приложенный к рычагу Жуковского, равен

и имеет такое же направление, если векторы  и
и  направлены в одну сторону (рис. 2.3.7а).
направлены в одну сторону (рис. 2.3.7а).
2. Замена момента парой сил. Представим момент, приложенный к звену АВ в виде пары сил, плечо которой равно длине звена (рис. 2.3.7б) и перенесем составляющие пары на рычаг Жуковского. Модуль составляющих сил пары и момент связаны формулой  .
.
Определение приведенного момента сил. Обычно силы, действующие на механизм, не уравновешиваются взаимно. Уравновесим их моментом Му, приложенным к кривошипу и вычислим его величину
|
|
|
 .
.
Очевидно, что приведенный момент сил Мп противоположен уравновешивающему моменту Му и равен  .
.
Пример. Вычислить приведенный момент сил для предыдущего примера (рис. 2.3.4).
Силы, действующие в машинах
Силы, действующие на звенья механизмов, составляющих машину, разделяют на движущие силы, силы полезного и вредного сопротивлений, силы тяжести и силы упругости, а так же реакции в кинематических парах.
Движущие силы и силы полезного (технологического) сопротивления. Движущие силы – силы, приводящие машину в движение.
Силы полезного (технологического) сопротивления – это силы, действующие на ведомые звенья со стороны обрабатываемого тела (вещества, материала), при выполнении технологической операции: например, сила сопротивления резанию в металлообрабатывающем станке или сила сопротивления воздуха, сжимаемого в цилиндре компрессора.
Эти силы, обычно измеряемые экспериментально, чаще всего задают диаграммами или таблицами. Они могут зависеть от ряда различных величин. Мы ограничимся двумя частными случаями.
|
|
|
1. Силы, зависящие от скорости звена. На рис. 2.3.8, 2.3.9. приведен вид диаграмм вращающего момента для электродвигателей в зависимости от угловой скорости вала.
Из этих рисунков ясно, что основным достоинством электродвигателя постоянного тока является большой пусковой момент; именно поэтому они применяются для привода трамваев и железнодорожных локомотивов (рис. 2.3.8).
Но наибольшее распространение получили асинхронные электродвигатели переменного тока из-за их надежности и сравнительной дешевизны (рис. 2.3.9).
 ωн, Мн обозначают номинальные значения угловой скорости и вращающего момента, которые должен развивать электродвигатель при работе под нагрузкой; ωс – синхронная скорость вращения вала (без нагрузки); Мmaх– опрокидывающий момент (максимальный вращающий момент, ко-
ωн, Мн обозначают номинальные значения угловой скорости и вращающего момента, которые должен развивать электродвигатель при работе под нагрузкой; ωс – синхронная скорость вращения вала (без нагрузки); Мmaх– опрокидывающий момент (максимальный вращающий момент, ко-
торый может развить электродвигатель.
В справочниках по электродвигателям указывают номинальную частоту вращения nн , номинальную мощность Рн , синхронную частоту вращения nс и коэффициент допустимой перегрузки  .
.
|
|
|
|
 Пример момента полезного сопротивления, зависящего от скорости, приведен на рис. 2.3.10.
Пример момента полезного сопротивления, зависящего от скорости, приведен на рис. 2.3.10.
Иногда могут задаваться диаграммы мощностей этих сил. В этом случае строят диаграмму момента, пользуясь формулой М = Р/ω.
 2. Силы зависят от положения звена. Характерной особенностью диаграмм таких сил является неоднозначность (петлеобразность) характеристики (рис. 2.3.12). Значения силы определяют по той ветви характеристики, у которой направление стрелки совпадает с направлением движения звена, которое движется в сторону возрастания номеров положений: если звено выполняет рабочий ход, то по верхней, если холостой – по нижней.
2. Силы зависят от положения звена. Характерной особенностью диаграмм таких сил является неоднозначность (петлеобразность) характеристики (рис. 2.3.12). Значения силы определяют по той ветви характеристики, у которой направление стрелки совпадает с направлением движения звена, которое движется в сторону возрастания номеров положений: если звено выполняет рабочий ход, то по верхней, если холостой – по нижней.
Если диаграмма задана таблицей или легко может быть перестроена, то удобнее всего построить ее на планах положений механизма так, чтобы ширина диаграммы равнялась хо  ду звена (рис. 2.3. 11).
ду звена (рис. 2.3. 11).
Рис. 2.3.11. Определение значений силы, зависящей от положения звена по ее диаграмме
Масштабные коэффициенты для осей диаграммы
 ,
,  ,
,
где Н – ход звена.
Измеряют по соответствующей ветви диаграммы координату yk. Значение силы в k-м положении  .
.
Цикл работы двигателя внутреннего сгорания (четырехтактного) (рис. 2.3.12) состоит из четырех тактов (рабочий ход, выхлоп, всасывание и сжатие) и осуществляется за два оборота кривошипа (коленчатого вида). Поэтому характеристика силы, действующей на поршень, является четырехзначной (двухпетлевой).
|
|
|

|
 , где F=р∙S , р – значение удельного давления (обычно максимальное), y– соответствующее ему расстояние;
, где F=р∙S , р – значение удельного давления (обычно максимальное), y– соответствующее ему расстояние;
|
 – площадь поршня.
– площадь поршня.
Сила упругости также зависит от положения звена, но ее характеристика однозначна.
Рис. 2.3.12. Диаграмма силы, действующей на поршень двигателя внутреннего сгорания (четырехтактного)
Дата добавления: 2018-04-15; просмотров: 507; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!