Лекция 4. Нелинейная теория упругости.
Теорема Гамильтона-Кэлли.
Любая степень симметричного тензора второго ранга  , определенная в виде
, определенная в виде

| (72) |
представляется в виде линейной комбинации второй, первой степени этого тензора и единичного тензора

| (73) |

Лекция5. Линейная теория упругости.
Лекция 6. Криволинейные системы координат.
Символы Кристоффеля. Дифференцирование вектора и тензора.
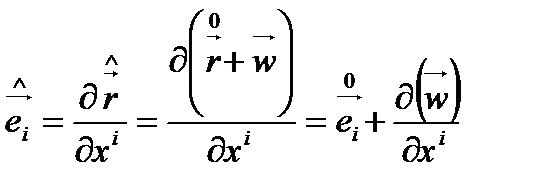
В криволинейных координатах при дифференцировании вектора перемещений  дифференцируется и базисный вектор:
дифференцируется и базисный вектор:
| (74) |
Производная базисного вектора по координате представляет собой вектор, определяемый через символы Кристоффеля второго рода
| (75) |
В евклидовом пространстве символ Кристоффеля второго рода симметричен по двум нижним индексам и выражается с помощью компонент метрического тензора
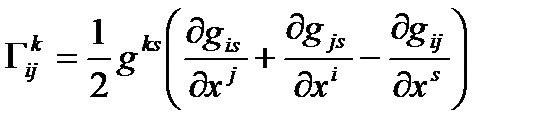
| (76) |
Таким образом, в криволинейных координатах производная по контравариантной координате  вектора перемещений
вектора перемещений  выражается так
выражается так

| (77) |
где оператор ковариантного дифференцирования набла для контравариантных компонент вектора  определен следующим образом
определен следующим образом
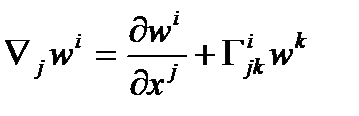
| (78) |
Из условия 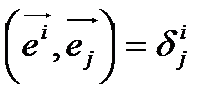 следует выражение ковариантной производной от контравариантного базисного вектора
следует выражение ковариантной производной от контравариантного базисного вектора

| (79) |
Откуда
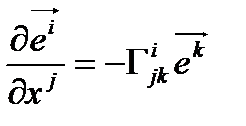
| (80) |
И мы получаем оператор ковариантного дифференцирования набла для ковариантных компонент вектора перемещения:
|
|
|

| (81) |
где оператор ковариантного дифференцирования набладля ковариантных компонентвектора определен следующим образом
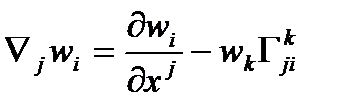
| (82) |
Выясним теперь, как зависят компоненты тензора деформации от компонент вектора перемещений в криволинейных системах координат.
В общем случае тензор деформации вводится как разница квадратов длин малых отрезков в актуальный и отсчетный моменты

| (83) |
То есть, вводя тензор деформаций как половины разницы метрических тензоров в актуальном и отсчетным состоянии, мы можем получить его выражение через вектор перемещений, задавая базисные вектора через перемещения.
| (84) |
Тогда получаем cучетом предыдущих формул 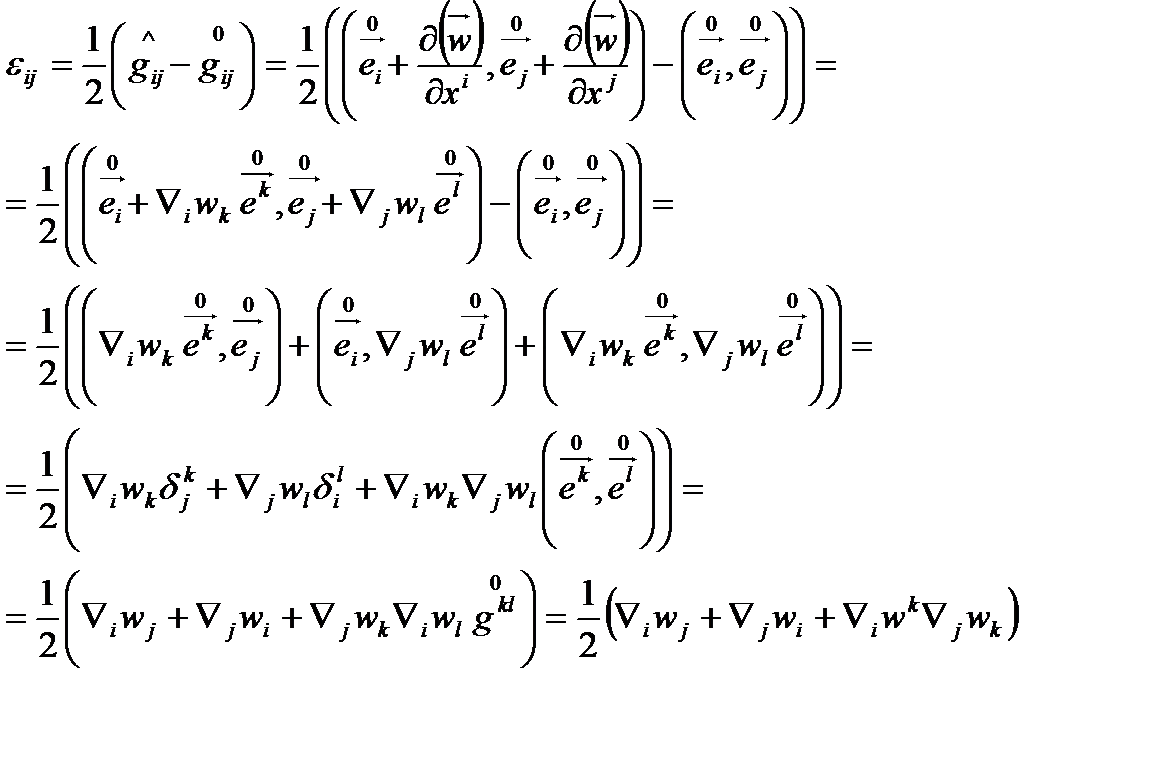
| (85) |
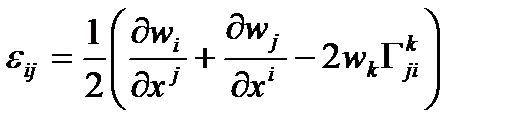
Что в случае малых деформаций дает кинематическое соотношение

| (86) |
Теперь продифференцируем симметричный тензор второго ранга.
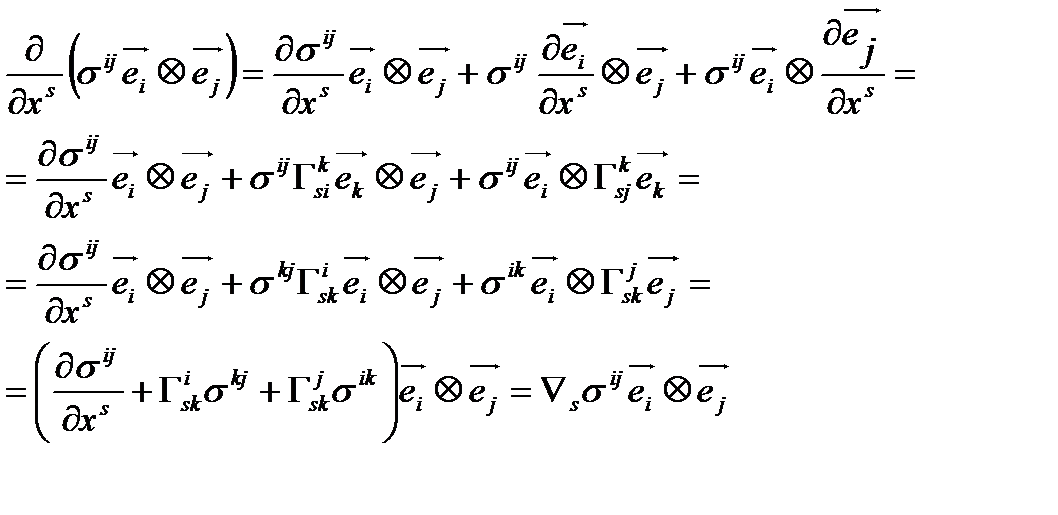
| (87) |
где оператор ковариантного дифференцирования набла для контравариантных компонент тензора  определим следующим равенством
определим следующим равенством
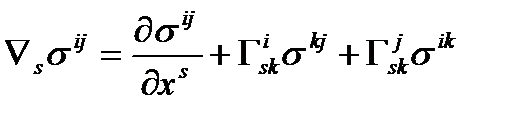
| (88) |
Цилиндрическая система координат
Рассмотри первую популярную криволинейную систему координат – Цилиндрическую.
Введем следующие переменные:
 , , 
| (89) |
Ковариантные компоненты метрического тензора равны нулю, кроме:
|
|
|

| (90) |
Контравариантные компоненты метрического тензора удовлетворяют равенству  и также равны нулю, кроме:
и также равны нулю, кроме:
| (91) |
Значение символов Кристоффеля второго рода в цилиндрической системе координат согласно соотношениям (76), (90) и (91) получаем следующие
 остальные равны нулю. остальные равны нулю.
| (92) |
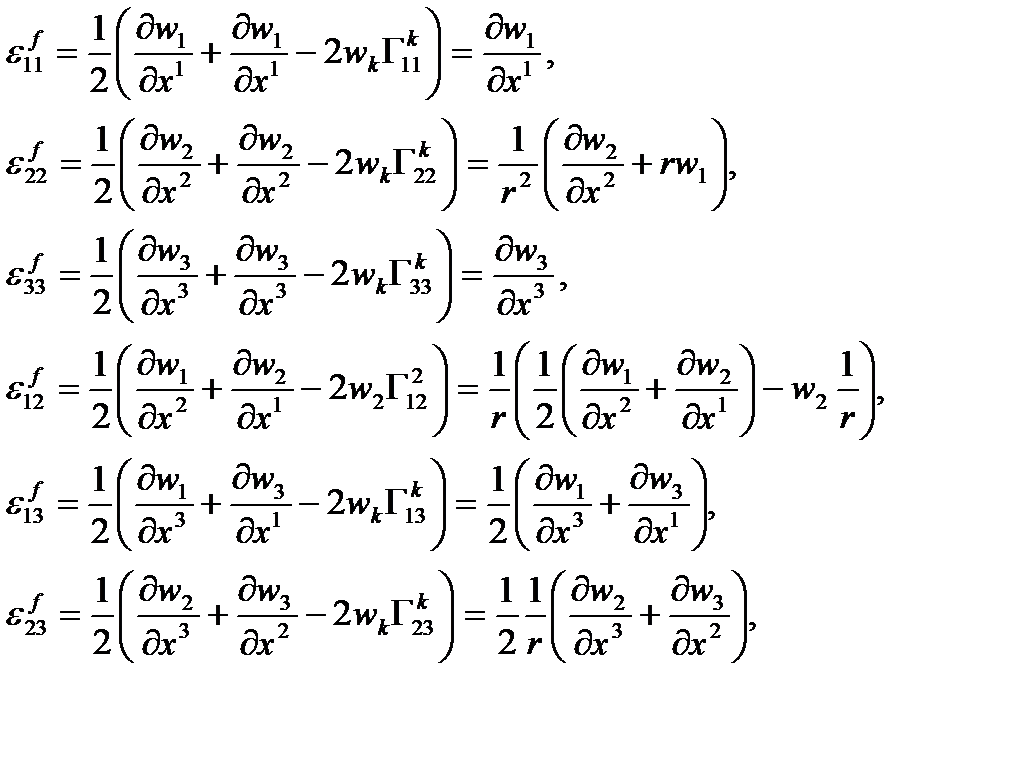
Таким образом, кинематические соотношения для компонент тензора малых деформаций (86) с учетом (92) дает
|
в цилиндрической системе координат будут иметь вид
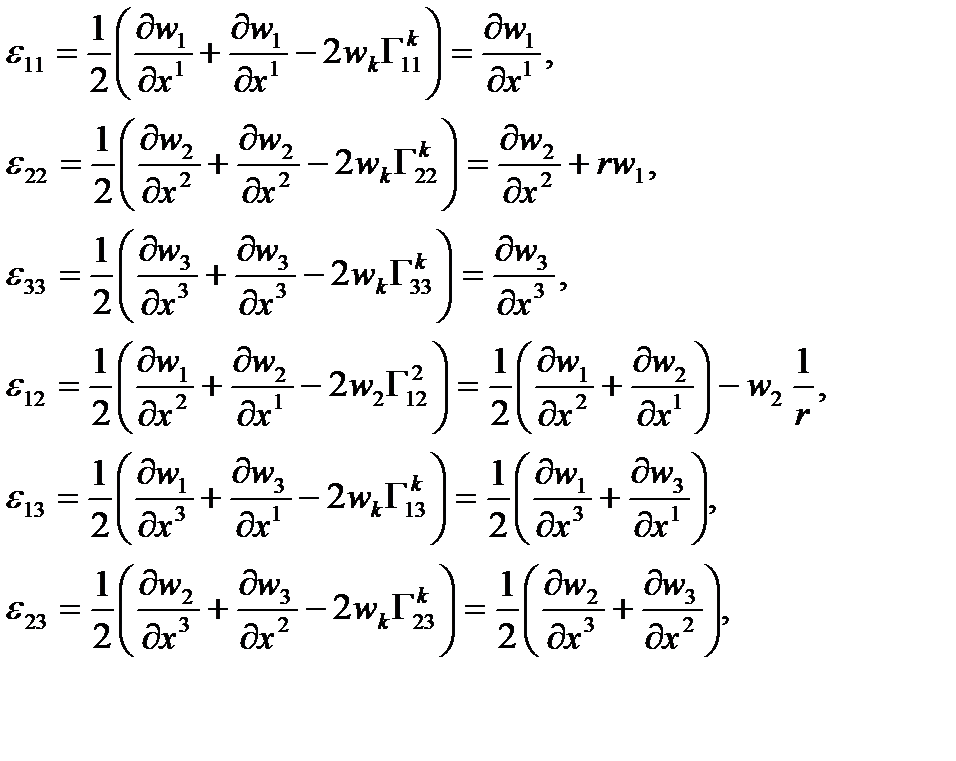
| (94) |
При замене обозначений получаем
Теперь рассмотрим сам тензор  .
.
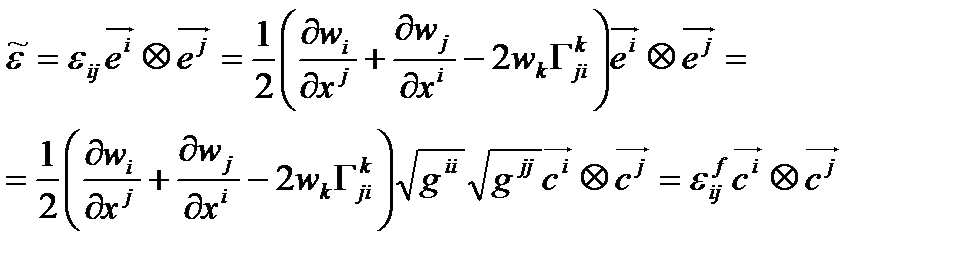
| (95) |
Где

| (96) |
Теперь получим окончательные соотношения
| (97) |
Рассмотрим теперь уравнения равновесия.
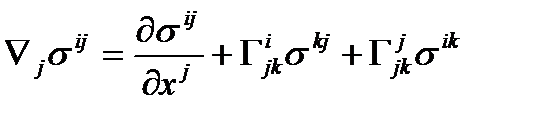
| (98) |
Покомпонентно
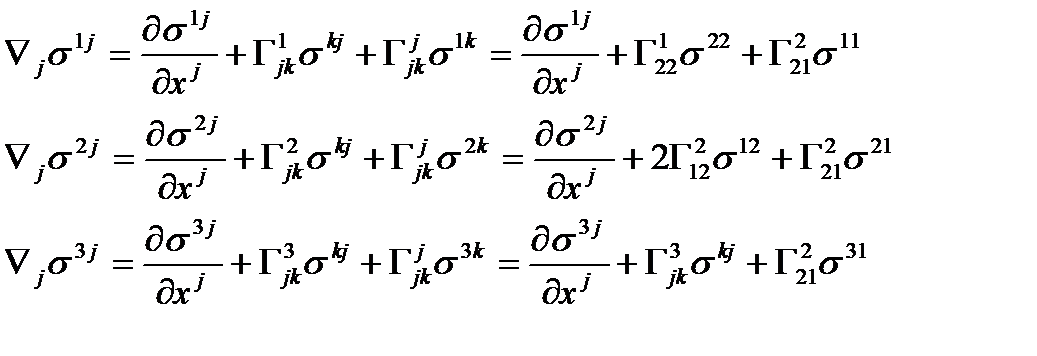
| (99) |
Положим независимость от второй и третьей координаты, тогда
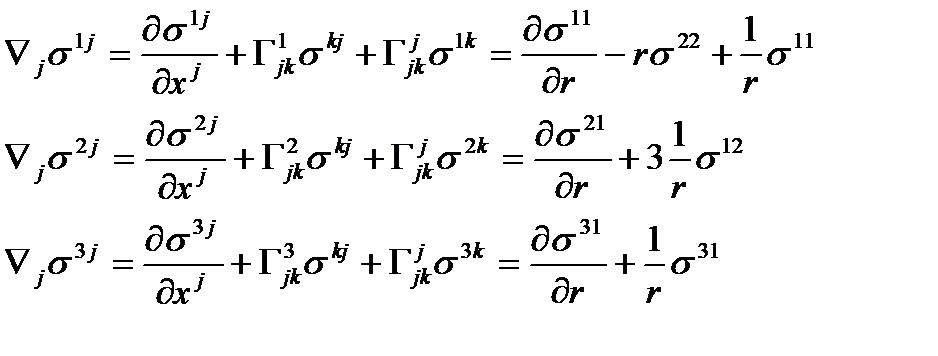
| (100) |
Лекция 7. Одномерные задачи.
Одномерная задача является самым простым вариантом задач в теории упругости. Но в этой простоте заключается и сложность. Как свести реальную задачу в трехмерном мире к одномерной? Необходимо рассмотреть случай, когда две размерности по сравнению с третьей не существенны. Классическим примером являются задачи вращения диска, а также раздувания сферического сосуда или цилиндрической трубы внутренним давлением. Но во всех этих случаях мы имеем дело уже не с декартовыми, а с цилиндрическими или сферическими, а значит – криволинейными системами координат. То есть необходимо уточнить как вид зависимости компонент тензора деформаций от компонент вектора перемещений, так и вид уравнений равновесия в выбранной криволинейной системе координат.
Дата добавления: 2018-05-12; просмотров: 859; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!