Обратные связи в схеме автоматического регулирования скорости вращения двигателя постоянного тока от тиристорныхпреобразователей?
1. Жесткая отрицательная обратная связь по напряжению:

Рисунок 5 Жесткая отрицательная обратная связь по напряжению
При падении напряжения на якоре двигателя М уменьшается сигнал обратной связи, что приводит к усилению входного сигнала Uвх усилителя У. В данной системе посредством обратной связи компенсируется падение напряжения на внутреннем сопротивлении преобразователя и колебания напряжения сети, т.е. стабилизируется выходное напряжение преобразователя.
2. Жесткая положительная обратная связь по току:

Рисунок 6 Жесткая положительная обратная связь по току
В случае жесткой положительной обратной связи по току якоря двигателя компенсация падения угловой скорости, возникающего в результате увеличения нагрузки, достигается автоматическим увеличением ЭДС преобразователя.
3. Жесткая отрицательная обратная связь по угловой скорости:

Рисунок 7 Жесткая отрицательная обратная связь по угловой скорости
Принцип действия жесткой отрицательной связи по угловой скорости заключается в следующем. С ростом нагрузки на валу двигателя уменьшается его угловая скорость и понижается сигнал с тахогенератораGT, находящегося на одном валу с двигателемM; напряжение, снимаемое с якоря тахогенератора, пропорционально угловой скорости двигателя. Так как задающий сигнал остается при этом постоянным, то сигнал на входе усилителя У при понижении угловой скорости возрастает, следовательно, возрастает эдс преобразователя П, что автоматически приводит к компенсации угловой скорости привода[1].
|
|
|
Схема управления асинхронным короткозамкнутым двигателем с командоконтролером.
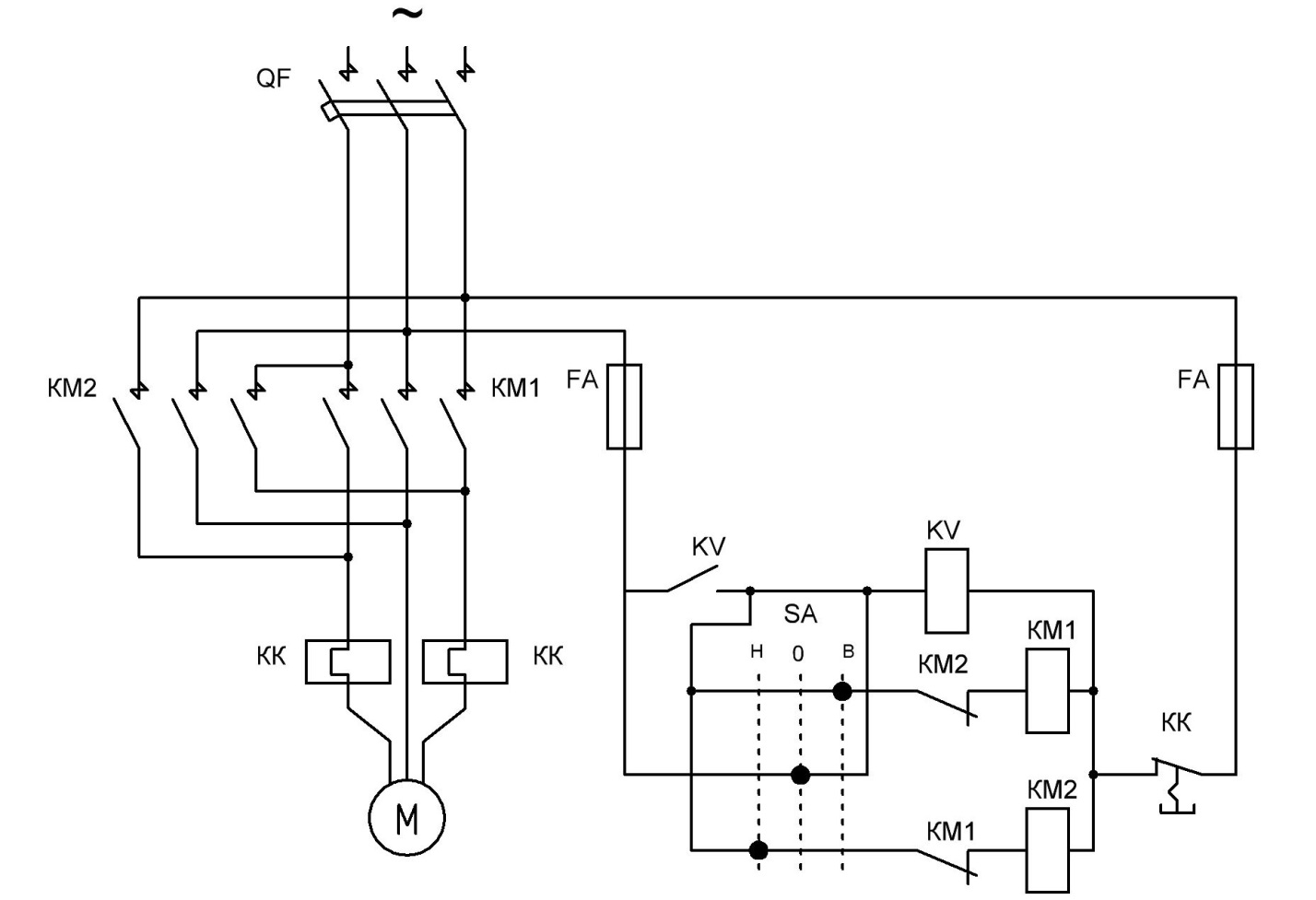
Рисунок 8 Схема реверсивного управления асинхронным короткозамкнутым двигателем с командоконтролером
На рисунке 8 показана схема реверсивного управления асинхронным короткозамкнутым двигателем с командоконтролером. При включении автоматического выключателя QF напряжение подается в схему главных цепей и, если командоконтроллерSA находится в положении 0, то через предохранители FA в схему цепей управления. Подтягивается реле KV, своим контактом встает на самоподхват и подает напряжение в цепи управления контакторами КМ1 и КМ2. Таким образом реализуется так называемая «нулевая блокировка», препятствующая пуску двигателя при включении автоматического выключателя QF и ошибочном положении
командоконтроллераSA.Для пуска двигателя в направлении «вперед» ручку командоконтроллераSA необходимо повернуть в сторону «В». При этом соберется цепь включения контактора КМ1. Во избежание короткого замыкания при возможной неисправности контактора КМ2, КМ1 блокирован нормально закрытым контактом КМ2. При включении КМ1 напряжение будет подано в обмотку электродвигателя М и он начнет вращаться в сторону «вперед». Для вращения М в сторону «назад» ручку командоконтроллера необходимо вернуть в положение 0. При этом цепь включения контактора КМ1 будет разорвана, его контакт в цепи КМ2 замкнется, подготавливая к включению цепь КМ2. При повороте ручки SA в положение «Н» включается контактор КМ2, двигатель М начинает вращение в сторону «назад». При перегрузке двигателя срабатывает тепловое реле КК и разрывает свой контакт в цепи управления, обесточивая ее, контактор КМ1 или КМ2 отключается, двигатель отключается от сети.
|
|
|
Задача 1
Двигатель постоянного тока независимого возбуждения типа ПБСТ-33 пускается с помощью пускового реостата. Разгон двигателя до естественной характеристики производится при постоянном магнитном потоке. Момент сопротивления электропривода  = 0,5Н
= 0,5Н  м.
м.
Рассчитать количество ступеней пускового реостата при  = 2,2
= 2,2  , а
, а  = 1,2 .
= 1,2 .
Рассчитать и построить кривые  и
и 
Таблица 1.1 Данные двигателя типа ПБСТ
| № Ва-ри-анта | Тип | Номин.Напря-жениеUnom, В | Номин. Мощ-ностьPnom, кВт | Номин. токInom, А | Номин.
Ско-ростьвраще-ния  nom,
об/мин nom,
об/мин
| Момент ИнерцииJ, Кг м2 | Сопротив. ЯкоряRя, Ом | Сопротив. Возбужде-нияrв, Ом |
| 44 | ПБСТ-33 | 220 | 2,1 | 11,0 | 2200 | 0,033 | 0,264 | 750 |
|
|
|
Число ступеней пускаm ведем поформуле (2-42) из [5].
 , (1.1)
, (1.1)
где Rm–полное сопротивление пусковой цепи,  ;
;

 – отношение
– отношение 
 Ом
Ом
 ,
,
тогда число ступеней пуска

При получении дробного числа выбираем ближайшее целое число 
Далее необходимо уточнить значения и I 2.
Вычислим по формуле (2-41) из [5]
 04
04
тогда
 А
А
или в относительных единицах 
Обратимся к рисунку 9, где показаны сопротивления ступеней пуска R1-R6 и секции сопротивлений R1c-R5c .

Рисунок 9 Пуск ДПТ НВ в 6 ступеней
По [5, формулы 2-40] расчитаем значения сопротивлений ступеней пуска.
 Ом
Ом
 Ом
Ом
 Ом
Ом
 Ом
Ом
 Ом
Ом
 Ом
Ом
 Ом
Ом
По [5, формулы 2-43] расчитаем значения сопротивлений секций.
 Ом
Ом

 Ом
Ом
 Ом
Ом
 Ом
Ом
 Ом
Ом
 Ом
Ом
Для расчета и посторения кривых и расчитаем следующие величины:
Найдем номинальную угловую скорость вращения двигателя 
 рад/с
рад/с
Рассчитаем идеальную скорость холостого хода 
 ,
,
где 
тогда  рад/с
рад/с
Рассчитаем момент короткого замыкания  для каждой ступени пуска.
для каждой ступени пуска.
|
|
|
 ,
,
где Ri – сопротивление ступени. i = R6-R1, для 1-6 ступеней пуска соответственно, i =Rя - для момента выхода на естественную характеристику соответственно.

Аналогично производим расчет для остальных ступеней и результаты вычислений сведем в таблицу 1.2.
Таблица 1.2 Моменты короткого замыкания ступеней пуска
 , Нм , Нм
|  , Нм , Нм
|  , Нм , Нм
|  , Нм , Нм
|  , Нм , Нм
|  , Нм , Нм
|  , Нм , Нм
|
| 22,8 | 41,1 | 74,2 | 133,8 | 241,3 | 435,2 | 785 |
Здесь  –моменты короткого замыкания 1-6 ступеней пуска соответственно, – момент короткого замыкания при выходе на естественную характеристику
–моменты короткого замыкания 1-6 ступеней пуска соответственно, – момент короткого замыкания при выходе на естественную характеристику
Произведем расчет электромеханической постоянной времени ТМ для всех ступеней пуска и момента выхода на естественную характеристику.

Рассчитаем электромеханическую постоянную времени для первой ступени пуска:
 с
с
Для остальных ступеней расчет производим аналогично и результаты вычислений сводим в таблицу 1.3
Таблица 1.3 Расчет электромеханических постоянных времени
| ТМ1, с | ТМ2, с | ТМ3, с | ТМ4, с | ТМ5, с | ТМ6, с | ТМе, с |
| 0,34 | 0,19 | 0,1 | 0,06 | 0,03 | 0,02 | 0,01 |
Здесь  – электромеханические постоянные для 1-6 ступеней пуска соответственно, Тме – электромеханическая постоянная момента выхода на естественную характеристику.
– электромеханические постоянные для 1-6 ступеней пуска соответственно, Тме – электромеханическая постоянная момента выхода на естественную характеристику.
Вычислим время  каждой ступени пуска и момента выхода на естественную характеристику.
каждой ступени пуска и момента выхода на естественную характеристику.

Расчитаем время первой ступени пуска 

 с
с
Для остальных ступеней пуска и процесса выхода на естественную характеристику время рассчитаем аналогично и сведем результаты в таблицу 1.4.
Таблица 1.4 Расчет времени ступеней пуска
| t1, с | t2, с | t3, с | t4, с | t5, с | t6, с | te, с |
| 0,58 | 0,32 | 0,18 | 0,1 | 0,035 | 0,03 | 0,017 |
Здесь t1-t6 – время процесса 1-6 ступеней пуска соответственно, te – время процесса выхода на естественную характеристику.
Рассчитаем перепад угловой скорости  относительно на каждой ступени пуска.
относительно на каждой ступени пуска.
 ,
,
где Ri – сопротивление ступени. i = R6-R1, для 1-6 ступеней пуска соответственно.
Найдем перепад угловой скорости в момент 1 ступени пуска.
 рад/с
рад/с
Для остальных стуеней расчет производим аналогично, результаты сводим в таблицу 1.5.
В момент выхода на естественную характеристику частота вращения двигателя достигает значения , поэтому расчет  производится только для процессов 1-6 ступеней пуска .
производится только для процессов 1-6 ступеней пуска .
Таблица 1.5 Расчет перепадов угловой скорости
 , рад/с , рад/с
|  , рад/с , рад/с
|  , рад/с , рад/с
|  , рад/с , рад/с
|  , рад/с , рад/с
|  , рад/с , рад/с
|
| 5,12 | 2,84 | 1,57 | 0,87 | 0,48 | 0,27 |
Произведем рассчет установившихся угловых частот в конце всех ступеней пуска.
Обозначим установившуюся скорость i-й ступени через  .
.

Произведем расчет установившейся угловой частоты вращения в конце первой ступени пуска.
 рад/с
рад/с
Для остальных ступеней расчет производим аналогично, результаты заносим в таблицу 1.6.
Таблица 1.6 Расчет установившейся угловой скорости
 , рад/с , рад/с
|  , рад/с , рад/с
|  , рад/с , рад/с
|  , рад/с , рад/с
|  , рад/с , рад/с
|  , рад/с , рад/с
|
| 225,28 | 227,56 | 228,83 | 229,53 | 229,92 | 230,13 |
Все необходимые вычисления произведены. Запишем выражения зависимости для каждой ступени пуска и момента выхода на естественную характеристику в виде таблицы 1.6.
В общем виде уравнение зависимости угловой скорости от времени имеет вид:  ,
,
где  установившаяся угловая скорость на i-й ступени;
установившаяся угловая скорость на i-й ступени;
 начальная скорость i-й ступени;
начальная скорость i-й ступени;
 электромеханическая постоянная времени i-й ступени.
электромеханическая постоянная времени i-й ступени.
В нашем случае пуск ведется под нагрузкой из неподвижного состояния, т.е.
 , тогда уравнения для первой ступени:
, тогда уравнения для первой ступени:


Запишем выражения зависимости  для каждой ступени пуска и момента выхода на естественную характеристику в виде таблицы 1.7.
для каждой ступени пуска и момента выхода на естественную характеристику в виде таблицы 1.7.
Уравнение зависимости тока от времени имеет вид:
 ,
,
где  ток, установившийся на i-й ступени;
ток, установившийся на i-й ступени;
 начальный ток i-й ступени;
начальный ток i-й ступени;
электромеханическая постоянная времени i-й ступени.
Таблица 1.7 Зависимости
| Ступень пуска | уравнение |
| 1 |
|
| 2 | 
|
| 3 | 
|
| 4 | 
|
| 5 | 
|
| 6 | 
|
| Выход на естественную характеристику | 
|
Таблица 1.7 Зависимости 
| Ступень пуска | уравнение |
| 1 | 
|
| 2 | 
|
| 3 | 
|
| 4 | 
|
| 5 | 
|
| 6 | 
|
| Выход на естественную характеристику | 
|
Графики зависимостей и приведены на рисунке 10.
 Рисунок 10 Графики зависимостей и
Рисунок 10 Графики зависимостей и
Задача 2
Для асинхронного двигателя с контактными кольцами необходимо разработать схему управления, составить спецификацию и дать краткое описание схемы.
Схема должна удовлетворять следующим условиям:
1. двигатель реверсируется;
2. скорость двигателя регулируется (использовать пусковые сопротивления)
Число ступеней и вид пуска, род торможения выбирается по соответствующему варианту (последняя цифра шифра) из таблицы.
Таблица 2.1 Исходные данные
| Варианты | Пуск в 3 ступени, управление кнопочное | 1 | 2 | 3 | 4 | 5 |
| Пуск в 2 ступени управление командоконтроллером | 6 | 7 | 8 | 9 | 10 | |
| Пуск в функции | времени | тока | времени | тока | времени | |
| Торможение | Род торможения | динамическое | противовключением | |||
| В функции | ЭДС | тока | ЭДС | времени | ||
| Питание цепей управления | Постоянный ток 220 В | Переменный ток , 380 В | Постоянный ток 220 в | |||

Рисунок 11 Схема силовых цепей

Рисунок 12 Схема цепей управления
Дата добавления: 2018-10-27; просмотров: 1182; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!