Построение графика частот вращения
График показывает все частоты п при любых комбинациях включенных передач и передаточных величины всех передач. До построения графика должна быть намечена кинематическая схема, поскольку в графике следует учесть одиночные передачи, служащие для связи коробки передач с двигателем (рис. 4, б) или со шпинделем, для реверсирования, для создания определенной компоновки.
Построим график частот вращения коробки передач при условии п = 63...1000 мин-1 и φ = 1,4, выбрав структуру z = 9 = 3t *32. Структурная сетка представлена на рисунке 4, а. Кинематическая схема (рис. 4, б) содержит две группы передач и две одиночные передачи, введенные для сокращения высоты коробки.

Рисунок 4- Структурная сетка (а) и кинематическая схема (б)
для z = 9 = 31*З3
Для построения надо провести и пронумеровать вертикальные линии, соответствующие валам, и горизонтальные линии, каждая из которых соответствует определенной частоте вращения (рис. 5, а).
График начинают строить от точки n min на линии последнего вала. В частности, пределы для передаточной величины определяют допустимый наклон лучей, т. е. число т перекрываемы лучом интервалов шкалы при выбранном φ (табл. 1).
Первым проводят луч i5 (это imin в группе р2 = 3). При понижающей передаче и φ = 1,4 луч должен перекрывать не более четырех интервалов lg φ .
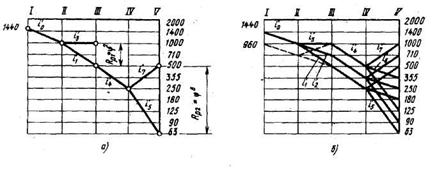
Рисунок 4- Построение графика частот вращения:
а) начало построения; б) полный график
|
|
|
Таблица 1- Допустимые числа интервалов φ на графике для КС
| Передачи (прямозубые) | φ | ||||
| 1.12 | 1.25 | 1.4 | 1.6 | 1.8 | |
| Понижающие | 12 | 6 | 4 | 3 | 2 |
| Повышающие | 6 | 3 | 2 | 1 | 1 |
В графике возможны варианты, связанные с выбором другого двигателя (например, вариант, показанный пунктиром на рисунка 4, б при п = 960 мин 1) или с выбором imax, , imin в отдельных группах.
При разработке кинематической структуры надо стремиться к наименьшему числу валов, передач, зубчатых колес. Для достижения наименьших радиальных размеров и унификации чисел зубьев колес в группе передач желательно выдерживать соотношение imax, , imin =1 . При этом крайние лучи, выходящие из одной точки, на графике частот вращения располагаются симметрично.
Техника безопасности
Правила эксплуатации и техническое обслуживание станка
Подготовка станка к эксплуатации, уход и обслуживание в период эксплуатации.
Испытание станков на геометрическую и кинематическую точность.
Основные направления модернизации станка данной группы:
- улучшение технических характеристик станка;
- расширение или изменение технологических возможностей станка;
- автоматизация оборудования сокращение времени холостых ходов;
|
|
|
- повышение долговечности и надежности станков.
Техника безопасности
Схема рабочей зоны станка. Техника безопасности при работе на станке.
Примеры модернизации станков данной группы.
Заключение
Делают вывод по работе в целом, подводят итоги. В заключении констатируется степень реализации задач поставленных во введении.
Литература
Раздел содержит перечень использованной при выполнении данного проекта литературы. Первоначально приводится государственный стандарт (СТБ), межгосударственный стандарт (ГОСТ), а затем техническая литература в алфавитном порядке авторов.
Выполнение графической части
Кинематическая схема предназначается для изображения кинематических связей и взаимодействия элементов станка, определяющих механические принципы его работы. При разработке кинематической схемы необходимо придерживаться установленных условных обозначений элементов кинематической схемы по ГОСТу 2.770—68.
Кинематическая схема вычерчивается, как правило, в ортогональных проекциях
Кинематическую схему рекомендуется вписывать в контур станка, т. е. в контур наиболее показательной проекции, например в изображение главного вида. Если при этом нужно показать механизмы, видимые только в другой проекции или закрытые другими механизмами, то допускается перемещать эти механизмы в положения, более удобные для изображения, и даже при необходимости выносить их за контур станка. В этих случаях сопряженные звенья, вычерченные раздельно, следует соединить фигурными скобками. Размеры условных обозначений на кинематической схеме выбираются в зависимости от размеров изображаемых элементов. Размеры условных обозначений одинаковых элементов на одной и той же схеме должны быть одинаковыми.
|
|
|
На кинематических схемах на выносных линиях следует указывать:
а) мощность и число оборотов в минуту электродвигателя;
б) число оборотов в минуту приводного шкива;
в) числа оборотов в минуту шпинделя;
г) нумерацию валов (считая от электродвигателя или приводного шкива) римскими цифрами;
д) направления вращения валов и других основных деталей (шпинделя, планшайбы и др.);
е) диаметр и ширину шкивов; сменные шкивы обозначаются отношением диаметров ведущих шкивов к диаметрам ведомых;
|
|
|
ж) число зубьев и модуль колес, например, z = 40, т= 3 -и порядковые номера зубчатых колес, начиная с электродвигателя или приводного шкива, арабскими цифрами, сменные зубчатые колеса обозначаются строчными буквами латинского алфавита;
з) число зубьев и шаг звездочек (цепных передач) в мм, например, z = 15,
t = 25 мм;
и) число заходов, направление нарезки, шаг винтов и червяков.
В случае включения в кинематическую схему гидравлических, электрических и пневматических устройств на схеме необходимо указывать эти устройства условными графическими обозначениями и проставить основные их характеристики (производительность и давление гидронасосов, диаметр поршня и штока и т. д.).
4Оценки результатов работы
Итогом работы учащегося над курсовым проектом (работой) является его защита. Представляя свою работу, учащийся должен продемонстрировать свои знания и умения кратко, в установленное время изложить сущность проделанной работы, аргументировано обосновать принятое решение..
Дата добавления: 2018-04-15; просмотров: 1253; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!