Вопрос2: Критерий устойчивости Найквиста
Критерий Найквиста — это графоаналитический критерий. Характерной его особенностью является то, что вывод об устойчивости или неустойчивости замкнутой системы делается в зависимости от вида амплитудно-фазовой (а. ф. х.) или логарифмических частотных характеристик (л. ч. х.) разомкнутой системы.
Помимо исследования устойчивости можно оценить и запас устойчивости. Более того, появляется возможность указать, как и за счет каких средств неустойчивая замкнутая система может быть сделана устойчивой и как можно повысить качество устойчивой замкнутой системы.
На комплексной плоскости начало вектора (1+Wраз(jω)) находится в точке с координатами: (-1; j0), а конец на АФЧХ разомкнутой системы, т. к. Wраз(jω) есть амплитудно-фазовая частотная характеристика разомкнутой системы.
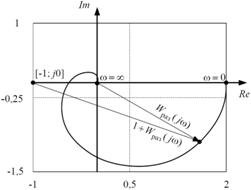 Рис. 4.14. Годограф АФЧХ устойчивой САУ
Рис. 4.14. Годограф АФЧХ устойчивой САУ
Из этого следуют формулировки критерия Найквиста.
Если разомкнутая система автоматического управления устойчивая, k = 0, то для устойчивости замкнутой системы необходимо и достаточно, чтобы амплитудно-фазовая частотная характеристика разомкнутой системы при изменении  от 0 до +∞ не охватывала точку с координатами [-1; j0] (рис. 4.14).
от 0 до +∞ не охватывала точку с координатами [-1; j0] (рис. 4.14).
На рис. 4.15 изображены примеры амплитудно-фазовых частотных характеристик разомкнутых систем.

Назовем переход Wраз(jω) через вещественную ось слева от точки [-1; j0], т. е. через отрезок (–∞; –1), положительным, если он идет сверху вниз, и отрицательным, если он идет снизу вверх. Если Wраз(jω) начинается на отрезке (-∞; –1) при = 0, или заканчивается на нем при = +∞, то в этих случаях считают, что она совершила полперехода.
|
|
|
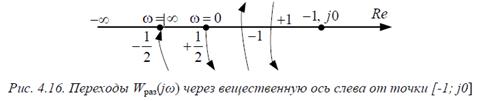
Если разомкнутая система автоматического управления неустойчива, то для того, чтобы замкнутая система была устойчива, необходимо и достаточно, чтобы разность между числом положительных и отрицательных переходов АФЧХ разомкнутой САУ через отрезок вещественной оси (-∞; -1) при изменении частоты от 0 до +∞ была равна (k/2), где k – число правых корней характеристического уравнения разомкнутой САУ.
3. Найти функцию весаw(t) по известной переходной функцииh(t).h(t) = 10t
W=h’(t)=10t=10
Билет №3.
Вопрос1: Программы управления
Одной из задач системы автоматического управления является поддержание требуемого значения управляемой величины у или изменение ее по определенной программе, которая либо заранее задается, либо поступает извне во время эксплуатации системы в зависимости от некоторых условий.
Программы могут быть временными (задаваемыми во времени):

или параметрическими (задаваемыми в текущих координатах):

 — какие-либо физические величины, характеризующие текущее состояние объекта в процессе управления.
— какие-либо физические величины, характеризующие текущее состояние объекта в процессе управления.
|
|
|
Примером временной программы может служить программа изменения управляемой величины, обеспечивающая правильный режим начального разгона объекта при пуске его в ход до наступления режима нормальной эксплуатации, в котором объект затем будет работать длительное время.
Примером таких программ могут служить: программа управления во времени при термической обработке металлов, система стабилизации угловой скорости мощного двигателя
Примером параметрической программы может служить задание требуемого переменного значения высоты полета у при снижении летательного аппарата, но не во времени, а в зависимости от текущего значения пройденного пути 5, чтобы снизиться в определенную точку независимо от времени протекания этого процесса.
Наконец, типичным примером параметрических программ являются так называемые заколы наведения в системах телеуправления и самонаведения снарядов. Законом наведения называется особая программа управления, которая задается через текущие значения координат и скоростей управляемого объекта независимо от того, в какой момент времени они имеют место в процессе движения объекта.
|
|
|
Итак, в САУ прежде всего задается тем или иным способом программа управления. Стабилизация неизменного значения управляемой величины будет простейшим частным случаем программы yпр=const.
Программа yпр(t) будет осуществляться системой управления неизбежно с некоторыми ошибками, как показано на рис. 2.5. Ошибка системы (рассогласование)
x(t) = yпр(t) - y(t)
обусловлена как погрешностями реальной аппаратуры, так и самим принципом построения системы. При этом меняющаяся в процессе управления так называемая динамическая ошибка x(t) может перейти в некоторое постоянное отклонение управляемой величины в установившемся режиме при yпр =const, называемое статической ошибкой хст.
Понятие «динамическая ошибка» является очень широким. В него включаются все виды ошибок систем автоматического управления, которые имеют место в динамических процессах, т. е. при меняющихся внешних воздействиях (возмущающих или управляющих) и во всех случаях переходных процессов. Различные виды этих ошибок и способы их уменьшения будут предметом изучения во всех дальнейших главах книги.
Величины динамических и статических ошибок управления в очень сильной степени зависят от структуры управляющего устройства, определяющей так называемый алгоритм управления.
|
|
|
Дата добавления: 2018-04-04; просмотров: 601; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!