ВЫВОД УРАВНЕНИЙ ДИНАМИКИ И ПЕРЕДАТОЧНЫХ
ФУНКЦИЙ ОБЪЕКТА И ДРУГИХ ЭЛЕМЕНТОВ СИСТЕМЫ
УПРАВЛЕНИЯ
При составлении дифференциальных уравнений звена:
а) определяют входную и выходную величины, а также дополнительные факторы, влияющие на состояние звена;
б) выбирают начало отсчета и систему координат;
в) вводят упрощения и допущения;
г) записывают уравнения, используя основные законы механики, электротехники, теплотехники, законы сохранения энергии и вещества, и разрешают эти уравнения относительно входных и выходных переменных.
Уравнения записываются в отклонениях от рабочего равновесного состояния. Линеаризация уравнений (разложение в ряд Тейлора и отбрасывание нелинейных членов разложения) и запись их в приращениях позволяют получить нулевые начальные условия.
Вывод передаточной функции резервуара
Входная величина – приток  , м3/с.
, м3/с.
Выходная величина – уровень H(t), м.
Возмущающее воздействие (нагрузка) – сток  , м3/с.
, м3/с.
Уравнение идеального баланса притока/расхода вещества, находящегося в баке (см. рис.1) имеет вид:

 ,
,
где S – площадь сечения резервуара, м2.
Перейдем от разностного уравнения к дифференциальному
 .
.
Разделим переменные  .
.
Проинтегрировав левую и правую части, получим решение уравнения
 .
.
Обозначим множитель  как
как  – коэффициент бака (см. табл.2), м-2.
– коэффициент бака (см. табл.2), м-2.
Запишем дифференциальное уравнение в операторной форме:
 .
.
Найдем передаточные функции бака по управлению и возмущению:
|
|
|
 ,
,
 .
.
3.2. Вывод передаточной функции двигателяпостоянного тока с независимым возбуждением.
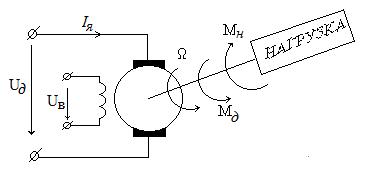
Рис. 4. Схема включения двигателя
Двигатель преобразует электрическую энергию в механическую (см. рис.4). Поэтому при выводе уравнений необходимо составлять баланс как электрической, так и механической энергий.
Входная величина – напряжение питания якорной цепи Uд,B. Выходная величина – угловая частота вращения якоря двигателя Ω, рад/с. Возмущающее воздействие – момент нагрузки на валу двигателя Мн ,  .
.
При изменении напряжения Uд изменяется ток в цепи якоря двигателя. Используя II закон Кирхгофа, записываем уравнение баланса электрической энергии:
 ,
,
где Rя, Lя – активное сопротивление и индуктивность якорной цепи;
Eд – противо-эдс якоря (эдс, наводимая в витках якоря при вращении
якоря в магнитном поле возбуждения).

Здесь  – угловая скорость вращения двигателя, с-1;
– угловая скорость вращения двигателя, с-1;
Ce – коэффициент ЭДС, равный ЭДС якоря, вращающегося со скоростью 1 рад/c при номинальном магнитном потоке возбуждения, В×с.
Уравнения механического равновесия записываем, используя II закон Ньютона для вращательного движения:  ,
,
|
|
|
где J – угловой момент инерции вращающихся частей двигателя, Н×м×с2;
Мд – вращающий момент, развиваемый двигателем, Н×м, он пропорционален току в якоре  ;
;
См– коэффициент передачи двигателя по моменту, Н×м/A.
Мн – момент нагрузки, представляет собой возмущающее воздействие.
Для вывода уравнения двигателя по управлению полагаем момент нагрузки Мн равным нулю (Мн=0).
Отсюда 
Подставим в уравнение электрического баланса
 .
.
Группируем выходной сигнал W(t) в левой части уравнения, а входной сигнал Uд – справа.
 .
.
Введем обозначения:
 – электромеханическая постоянная времени двигателя, с;
– электромеханическая постоянная времени двигателя, с;
 – электромагнитная постоянная времени двигателя, с;
– электромагнитная постоянная времени двигателя, с;
 – коэффициент передачи двигателя по скорости, 1/(В×с).
– коэффициент передачи двигателя по скорости, 1/(В×с).
Теперь уравнение двигателя получает вид:
 .
.
Переходим к операторной форме:
 .
.
Отсюда можем записать передаточную функцию двигателя по управлению
 ,
,
В случае малости электромагнитной постоянной времени двигателя ею можно пренебречь (в задании указано Lя =0 и, следовательно, Те = 0), двигатель описывается уравнением I порядка 
|
|
|
с передаточной функцией  .
.
Теперь учтем при выводе наличие момента нагрузки Мн
 . Отсюда
. Отсюда  .
.
Подставим в уравнение электрического баланса
 .
.
Группируем выходной сигнал W(t) в левой части уравнения, а входные сигналы Uд и Мн – в правой.
 .
.
Используя введенные ранее обозначения Те, Тм, Кду, а также
 – коэффициент передачи двигателя по нагрузке,
– коэффициент передачи двигателя по нагрузке,  , записываем уравнение двигателя в операторной форме
, записываем уравнение двигателя в операторной форме
 .
.
При Мн = 0 приходим к полученному ранее уравнению и передаточной функции двигателя по управлению Wду(p).
При Uд = 0 получаем уравнение двигателя по возмущению
 .
.
Передаточная функция двигателя по возмущению
 .
.
Отдельно рассмотрим динамическую модель двигателя при использовании датчика тока (вариант 5). Вернемся к уравнению электрического баланса:
 ,
,
перенесем противоЭДС в правую сторону уравнения
и перейдем к операторной форме
 .
.
Вынесем за скобку в левой части Rя:
Получим передаточную функцию
 ,
,
где .
На основании этого уравнения построим структурную схему системы управления для вариантов 5.х (рис. 4).

Рис.5. Структурная схема системы управления для варианта 5.х
|
|
|
Дата добавления: 2018-02-15; просмотров: 1047; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!