СОСТАВЛЕНИЕ ФУНКЦИОНАЛЬНОЙ СХЕМЫ САУ
Министерство образования и науки Российской Федерации
Костромской государственный технологический университет
Кафедра автоматики и микропроцессорной техники
АНАЛИЗ И СИНТЕЗ ЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Методические указания
К выполнению курсового проекта по дисциплине
«Теория автоматического управления»
Составители
Л.В. Воронова, В.М. Федюкин
Кострома
КГТУ
2012
УДК 653.16
Анализ и синтез линейных систем автоматического управления: метод. указания / сост. Л. В. Воронова, В.М. Федюкин. – Кострома: Изд-во Костром. гос. технол. ун-та, 2012.– 28 с.
Методические указания к выполнению курсового проекта соответствуют учебному плану дисциплины «Теория автоматического управления». Предназначены для подготовки бакалавров по направлению 220000 «Автоматика и управление», содержит задание и теоретические пояснения к выполнению каждого этапа курсового проекта.
Рецензенты: канд. техн. наук, доцент зав. кафедрой электротехники
и электромеханики КГТУ Ю.П. Приваленков;
кафедра автоматики и микропроцессорной
техники КГТУ.
Рассмотрено и рекомендовано к изданию редакционно-издательским советом КГТУ.
ãКостромской государственный технологический университет, 2012.
ЗАДАНИЕ К КУРСОВОМУ ПРОЕКТУ
|
|
|
ЦЕЛЬ: приобретение и закрепление практических навыков по расчету замкнутых линейных систем автоматического управления (САУ).
ИСХОДНЫЕ ДАННЫЕ:
– упрощенная описательная схема САУ (по вариантам);
– параметры элементов САУ (по вариантам);
– требования качества САУ.
СОДЕРЖАНИЕ ПОЯСНИТЕЛЬНОЙ ЗАПИСКИ
1. Исходное задание (по варианту).
2. Функциональная схема САУ, анализ структуры, определение целей управления, управляющих и возмущающих воздействий.
3. Вывод уравнений динамики и передаточных функций объекта и других элементов системы управления.
4. Вывод передаточной функции разомкнутой системы и передаточных функций замкнутой системы по управлению, по ошибке и по возмущению. При выводе полагать передаточную функцию устройства управления  .
.
5. Обеспечение качества САУ в установившемся режиме. Исходя из заданной статической точности d £ 1% (или ошибки по скорости для астатической системы), рассчитать требуемый коэффициент усиления k1 устройства управления.
6. Анализ качества исходной САУ. При рассчитанном значении k1 построить логарифмические амплитудно-фазовые частотные характеристики (ЛАФЧХ) разомкнутой системы. Провести анализ устойчивости замкнутой системы, для устойчивой системы определить возможную длительность переходного процесса. Сделать выводы.
|
|
|
7. Синтез корректирующего устройства. Исходя из требований к динамике САУ, построить желаемую логарифмическую амплитудно-частотную характеристику (ЛАЧХ) разомкнутой системы и ЛАЧХ корректирующего звена. Определить параметры и схемную реализацию корректирующего устройства.
8. Анализ областей устойчивости скорректированной системы по одному или двум параметрам (по указанию преподавателя) методом D-разбиения.
9. Анализ качества скорректированной САУ. Построить ЛАЧХ и ЛФЧХ разомкнутой скорректированной системы и определить запас устойчивости по амплитуде и по фазе. Построить переходный процесс в системе по управляющему и возмущающему воздействиям. Определить временные показатели качества процесса регулирования.
ОПИСАНИЕ УПРОЩЕННОЙ СХЕМЫ САУ
Схема отражает все варианты заданий и состоит из устройства управления УУ, силового преобразователя СП, двигателя, редуктора Ред, вентиля и бака.










| |




















| |
| |

| |





 Двигатель
Двигатель
Uзд УУ СП
|
|
|
W ДС a ДУг Мн



 Ред Вентиль
Ред Вентиль
ДТ Мдв
ОС4 ОС3 ДУр Q1 Бак
ОС2
ОС1
H Q2
Рис. 1. Упрощенная функциональная схема САУ
Схема содержит датчики уровня жидкости в баке ДУр, угла поворота ДУг, скорости ДС и тока двигателя ДТ, из которых в конкретном варианте задания используется один или два. Устройство управления представляется состоящим из двух блоков, к которым подводятся сигналы обратной связи.
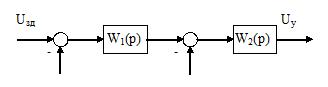
Рис. 2. Часть схемы, соответствующая устройству управления
В зависимости от варианта задания следует выбрать элементы схемы. Если задано регулирование угла поворота выходного вала редуктора, то все последующие элементы исключаются. Аналогично поступают при регулировании скорости вращения двигателя.
|
|
|
Вариант задания к курсовому проекту содержит две цифры Х.Х. Первая цифра определяет структуру исследуемой системы (табл. 1), вторая – числовые значения параметров (табл. 2).
Таблица 1
ЗАДАНИЕ СТРУКТУРЫ СИСТЕМЫ
| Вариант | ДУр | ДУг | ДС | ДТ | Регулируемая величина | Возмущающее воздействие | Lя |
| 1.х | + | — | — | — | H | Q2=kQ t; Mн=0 | 0 |
| 2.х | + | + | — | — | H | DQ=Q2max - Q2min; Mн=0 | 0 |
| 3.х | + | — | + | — | H | Q2=kQ t; Mн=0 | 0 |
| 4.х | — | + | + | — | a | DMн=Mнmax - Mнmin | Табл. 2 |
| 5.х | — | — | + | + | W | Mн=kм t | Табл. 2 |
ЧИСЛОВЫЕ ЗНАЧЕНИЯ ПАРАМЕТРОВ СИСТЕМЫ
Таблица 2
| Вариант | х.1 | х.2 | х.3 | х.4 | х.5 | х.6 | х.7 | х.8 | х.9 | х.10 | Примечание | |
| k2 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | Вар. 5–10 | |
| kсп | 10 | 20 | 25 | 50 | 15 | 30 | 40 | 60 | 70 | 75 | ||
| Rя | Ом | 4 | 2 | 3.5 | 5.5 | 1.5 | 3 | 4,5 | 5 | 6 | 2,5 | |
| Lя | Гн | 0.05 | 0.02 | 0.01 | 0.04 | 0.015 | 0,02 | 0,03 | 0,04 | 0,02 | 0,04 | ПАРАМЕТРЫ |
| J | Кгм2 | 0.02 | 0.1 | 0.2 | 0.02 | 0.08 | 0,05 | 0,04 | 0,15 | 0,25 | 0,12 | |
| Ce | В с | 0.25 | 0.5 | 1 | 0.9 | 0.7 | 0,3 | 0,4 | 0,6 | 0,7 | 0,8 | ДВИГАТЕЛЯ |
| Cм | Н м/А | 0.25 | 0.5 | 1 | 0.9 | 0.7 | 0,3 | 0,4 | 0,6 | 0,7 | 0,8 | |
| Iред | 1000 | 2000 | 2000 | 1200 | 800 | 1200 | 1400 | 1500 | 1600 | 1000 | Редуктор | |
| KB | м3/c рад | 0.5 | 0.6 | 1 | 0.7 | 0.8 | 0,5 | 0,6 | 1 | 0,7 | 0,8 | Вентиль |
| S | м2 | 0.8 | 1 | 0.7 | 0.6 | 0.5 | 5 | 6 | 10 | 2 | 1,5 | Бак |
| kh | В/м | 10 | 1 | 3 | 2 | 5 | 2,5 | 2 | 1,5 | 1,4 | 1,2 | ДУр |
| ka | В/рад | 10 | 9 | 6 | 4 | 5 | 8 | 7 | 6 | 5 | 4,5 | ДУг |
| kw | В с | 0.08 | 0.04 | 0.05 | 0.07 | 0.1 | 0,07 | 0,05 | 0,04 | 0,07 | 0,05 | ДС |
| kI | В/A | 1 | 0.2 | 0.15 | 0.18 | 0.25 | 1 | 0.3 | 0.4 | 0.5 | 0.2 | ДТ |
| kQ | м3/c2 | 0.2 | 0.25 | 0.15 | 0.2 | 0.22 | 0.1 | 0.2 | 0.15 | 0.25 | 0.3 | |
| kM | Н м/с | 0.1 | 0.2 | 0.3 | 0.15 | 0.25 | 0.1 | 0.12 | 0.15 | 0.16 | 0.18 | ПАРАМЕТРЫ |
| Qmax | м3/c | 0.2 | 1 | 0.6 | 0.5 | 0.4 | 0.2 | 0.4 | 1 | 0.15 | 0.1 | ВОЗМУЩАЮЩИХ |
| Qmin | м3/c | 0.1 | 0.5 | 0.3 | 0.25 | 0.2 | 0.1 | 0.2 | 0.5 | 0.05 | 0.05 | ВОЗДЕЙСТВИЙ |
| Mmax | Н м | 0.4 | 3 | 10 | 15 | 1.5 | 2 | 4 | 6 | 8 | 9 | |
| Mmin | Н м | 0.2 | 1 | 5 | 10 | 0.5 | 1 | 2 | 3 | 4 | 5 | |
| Hзд | М | 0.9 | 10 | 3 | 5 | 2 | 4 | 6 | 7 | 7,5 | 8 | ЗАДАННЫЕ |
| aзд | Рад | 0.5 | 1 | 1.5 | 2.5 | 2 | 1,2 | 1,4 | 1,6 | 1,8 | 2,2 | ЗНАЧЕНИЯ |
| Wзд | об/мин | 800 | 1500 | 1800 | 1000 | 600 | 1200 | 1400 | 1600 | 1100 | 1700 | РЕГУЛИРУЕ МЫХ ВЕЛИЧИН |
| Вариант | х.1 | х.2 | х.3 | х.4 | х.5 | х.6 | х.7 | х.8 | х.9 | х.10 | Примечание | |
| tпп | с | 3 | 3.5 | 4 | 5 | 4.5 | 6 | 5 | 4 | 6 | 3 | Вар.1,2,3 |
| tпп | с | 0.6 | 0.7 | 0.5 | 0.55 | 0.4 | 0.8 | 0.9 | 0.6 | 0.7 | 0.5 | Вар.4,5 |
СОСТАВЛЕНИЕ ФУНКЦИОНАЛЬНОЙ СХЕМЫ САУ
Для анализа свойств и поведения САУ целесообразно разделить ее элементы не по конструктивным, а по их функциональным признакам, и изображать систему в виде структурной схемы.
Структурная функциональная схема САУ – это графическое представление САУ в виде набора элементов, выделенных по функциональному признаку, с указанием связей между ними.
При построении структурной схемы САУ пользуются следующими обозначениями:
 1)Отдельный элемент изображается прямоугольником с указанием входного и выходного сигналов. Элемент структурной
1)Отдельный элемент изображается прямоугольником с указанием входного и выходного сигналов. Элемент структурной
схемы с выделенными входом и выходом
называется звеном.
Каждый элемент отличается от других математическим описанием, что отображается внутри его соответствующей передаточной функцией W(p).
 Передаточная функция
Передаточная функция  – это отношение изображения выходного сигнала звена или системы к изображению входного в преобразовании Лапласа при нулевых начальных условиях:
– это отношение изображения выходного сигнала звена или системы к изображению входного в преобразовании Лапласа при нулевых начальных условиях:
2)Связи между элементами и внешними воздействиями показывают в виде линий со стрелками, что отражает направление прохождения сигналов в системе.
 3) Информационные сигналы в системе могут складываться или вычитаться, что изображается в схеме в виде специального элемента – сумматора X3 = X1 ± X2.
3) Информационные сигналы в системе могут складываться или вычитаться, что изображается в схеме в виде специального элемента – сумматора X3 = X1 ± X2.
Элемент сравнения, выполняющий функцию вычисления ошибки ε = g – y, может изображаться в виде сумматора с затемненным сектором, что означает инверсный вход.
 4) Информационные сигналы могут дублироваться и поступать на несколько элементов структуры X1 = X2 = X3
4) Информационные сигналы могут дублироваться и поступать на несколько элементов структуры X1 = X2 = X3
Этот элемент называется узлом.
Теперь мы можем составить структурную функциональную схему исследуемой системы, выделив в ней в соответствии с заданием устройство управления W1(p), W2(p), силовой преобразователь СП Wсп(p), передаточные функции двигателя по управлению Wду(p) и возмущению Wдв(p), редуктор Wp(p), вентиль Wв(p) и бак (резервуар) с передаточными функциями по управлению Wбу(p) и возмущению Wбв(p). В цепях обратной связи показываем подключение датчиков контролируемых параметров. На рис.3 представлена обобщенная структурная схема системы, в которой отражены все 5 вариантов заданий, из которой каждый должен выбрать только свои элементы и построить структурную схему своего варианта. Схема для варианта 5 имеет особенности и будет представлена позже.
Далее каждый делает выводы о цели управления, об управляющих и возмущающих воздействиях для своего варианта.
 |
 Мн Q2
Мн Q2
Uзд ε Uд Ω α Q1 H
 |
_ _
 |
Рис. 3. Обобщенная структурная схема исследуемой системы
Дата добавления: 2018-02-15; просмотров: 877; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!