Шкала показателей для оценки плавности хода по методу Шперлинга
| Показатель плавности хода | Качественная оценка плавности хода |
| 1 | отличная |
| 2 | хорошая |
| 3 | удовлетворительная |
| 4 | приемлемая для эксплуатации |
| 4,5 | не приемлемая для эксплуатации |
| 5 | опасная |
Показатель плавности хода по ОСТ
24.050.16.85 [3]
Существенные недостатки метода Шперлинга привели к разработке алгоритмов 44
оценки плавности хода вагонов, позволяющих показатель плавности хода однозначно выразить через статистические характеристики случайных колебаний кузова вагона. Такими характеристиками случайных колебаний вагонов является дисперсия ускорений, характеризующая мощность процесса колебаний, и спектральная плотность ускорений, характеризующая распределение этой мощности по частоте.
В соответствии с ОСТ 24.050.16-85 вычисление показателя плавности хода w-для реализации длительностью Tjпроизводится по формуле
W. = 00^3 .
где а. — среднее квадратичное значение виброускорений для реализации /, а = 4,346 для вибрации в вертикальном направлении; а = = 4,676 для вибрации в горизонтальном поперечном направлении.
Полученные для отдельных реализаций длительностью Т значения показателей плавности хода предлагается усреднять по формуле где Ту — продолжительность jреализации; Г — суммарное время определения показателя плавности хода для данной скорости.
Таблица 13.3
Оценка плавности хода на железных дорогах
|
|
|
России
| Показатель плавности хода | Качественная оценка плавности хода |
| <1 | отличный |
| <2 | хороший |
| <3,25 | удовлетворительный |
| >3,25 | не пригодный |
Средний показатель плавности хода wcp должен быть не более 3,25 для пассажирских вагонов поездов с локомотивной тягой, вагонов электро- и дизель-поездов, автомотрис, груженых вагонов метрополитена (табл. 13.3).
Оценка уровня вибрации в подвижном составе по международному стандарту ISO
2631 [54] и ГОСТ 311 91 [9] проводится по измерениям среднеквадратичного виброускорения. Воздействие вибрации на человека рассматривается в отношении:
— его здоровья и степени комфорта;
— чувствительности к воздействию вибрации;
— подверженности болезни движения.
Под комфортом понимают субъективное ощущение хорошего самочувствия в условиях воздействия внешних факторов. Под чувствительностью к вибрации понимают субъективное восприятие человеком наличия воздействия на него вибрации. Под болезнью движения понимают рвотный рефлекс, тошноту и недомогания, провоцируемые движением (болезнь движения, обусловленную морской качкой, называют морской болезнью). На базе ISO 2631 для оценки влияния вибрации на пассажиров и поездные бригады рельсовых экипажей разработан специальный межгосударственный стандарт ГОСТ 311 91-4.2006 (ISO 2631-4:2001) [10] для оценки вибраций как на кузове, так и на поверхностях контакта сидений или спальных мест с телом человека.
|
|
|
Воздействие вибраций ориентируют по базицентрической системе координат для тела человека (рис. 13.7) и системе координат рельсового экипажа (см. рис. 13.1). С учетом того, что человек по-разному воспринимает воздействие вибрации на различных частотах в разных направлениях, вводятся основные и дополнительные функции частотной коррекции (рис. 13.8). Основные функции коррекции учитывают особенности восприятия человеком вибрации (рис. 13.8, о):




| Рис. 13.7. Базицентрическая система координат для тела человека в положении: а — сидя; б — стоя; в — лежа |
| Частота, Гц |


| wk |
| Частота, Гц |

| Рис. 13.8. Функции частотной коррекции: а — основные; б — дополнительные |
Wf— для направления zи вращений при оценке болезни движения.
Из рис. 13.8, а, видно, что наиболее неблагоприятное воздействие оказывает вибрация в вертикальном направлении с частотой 4—8 Гц, в горизонтальном направлении с частотой 1—2 Гц, для болезни движения с частотой 0,125—0,25 Гц.
|
|
|
Дополнительные функции коррекции учитывают влияние поверхности сидений и спинок, а также особенности передачи вибрации на голову лежащего человека (рис. 13.8, б):
— шс — для направления х для спинки сидения;
- we— для вращений относительно осей гх, г, г7 для поверхности сидения;
— Wj — для вертикального направления лежачего человека (голова).
Из рис. 13.8, б, видно, что наиболее неблагоприятное воздействие на сидящего человека оказывали вибрации в направлении движения с частотой 0,6—8 Гц, вращения с частотой 0,5—1 Гц, а для головы лежачего человека — вибрации с частотой 8—100 Гц.
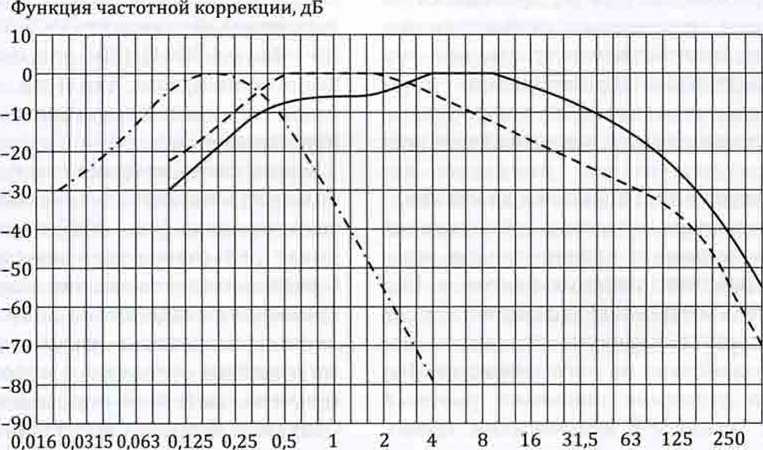
В большинстве стран при оценке подвижного состава используются не функция частотной коррекции ык, а функция частотной коррекции wh,которая на частотах от 4 до 8 Гц меньше в 1,25 раза [рис. 13.9).
В стандартах ISO 2631 и ГОСТ 311 91- 1.2004 не устанавливаются требования к допустимой вибрации. Приближенное представление о возможной реакции человека дают следующие значения:
— менее 0,315 м/с2 — дискомфорт не ощущается;
|
|
|
- от 0,315 до 0,63 м/с2 — легкое ощущение дискомфорта;
— т 0,5 до 1 м/с2 — приемлемое ощущение дискомфорта;
— от 0,8 до 1,6 м/с2 — отчетливое ощущение дискомфорта;
- от 1,25 до 2,5 м/с2 — ощущение сильного дискомфорта;
- свыше 2,5 м/с2 — крайняя степень дискомфорта.
Количественные соотношения между характеристиками вибрации и риском нарушения здоровья данным стандартом также не установлены. В то же время вводится понятие зоны предупреждения, в которой считается, что имеется потенциальный риск здоровью человека, если он находится в пределах данной зоны в течение определенного промежутка времени. Для времени воздействия 4 ч зоной предупреждения является уровень ускорений, превышающий 0,63 м/с2, для времени воздействия 8 ч — 0,5 м/с2, для времени воздействия 24 ч — 0,315 м/с2.
Стандарт ISO 2631 также дает возможность оценить влияние низкочастотных колебаний, связанных с прохождением кривых и наклонами кузова на появление укачивания (болезнь движения) через дозу укачивания, которую определяют следующим образом:
_i
MSDV= \TQaw(t)dt 2
где alv(t) — корректированное виброускорение в направлении оси z, м/с2; Г — общий период времени, в течении которого наблюдаются низкочастотные колебания.

| Функция частотной коррекции, дБ |
| Рис. 13.9. Отличия функции частотной коррекции whи wk |
На плавность хода влияют различные нагрузки и силы: динамические, от ускорения (замедления при торможении), работа об- рессоренных частей и др.
Коэффициенты динамики — величины динамических сил, которые удобно определять через статическую нагрузку (или статические напряжения). Коэффициентом вертикальной динамики называют отношение динамической силы Р к статической Р-. к =Р /Р . Поэтому величина динамической силы получается умножением силы тяжести брутто (или напряжений от этой силы) на коэффициент вертикальной динамики /сдв.
При проведении испытаний подвижного состава обычно регистрируют статические и динамические прогибы рессорного подвешивания, статические и динамические напряжения в характерных местах конструкции.
По отношению измеренных показателей в динамике к их значениям в статике вычисляют коэффициент /сдв. В дальнейшем эти значения используют при оценке долговечности конструкции, но в некоторых нормах им придается значение самостоятельных критериев.
Рамная сила — это поперечная горизонтальная сила, действующая на колесную пару со стороны тележки, обычно определяется по напряжениям, возникающим в раме под действием поперечных сил (поэтому получила название рамной). Между рамной силой и боковой силой от действующей от колеса на рельс существует определенное соответствие, и это широко используется для экспресс-оценки воздействия экипажа на ж.-д. путь. Допустимые значения рамных сил в долях от вертикальных сил приведены в табл. 13.4.
Ускорения обрессоренных и необрессорен- ных частей. С точки зрения теории, коэффициенты динамики и ускорения, в долях от ускорения д, должны быть близки между собой. С другой стороны результаты измерений существенно зависят от частотного диапазона, в котором производятся измерения. Поэтому в нормативных документах дополнительно ограничиваются ускорения кузова и обрессоренных частей тележек.
Для оценки основных показателей ходовых качеств, как правило, рассматривается диапазон частот колебаний до 20 Гц. При теоретическом определении этих показателей вероятность непревышения нормативных значений принимается >0,97, а при экспериментальных исследованиях не менее 0,999.
Оценка устойчивости от опрокидывания производится при движении экипажа по кривым участкам пути для двух случаев: опрокидывание наружу или внутрь кривой. В первом случае рассматривается движение вагона в составе поезда с максимально допустимой скоростью для кривой данного радиуса и возвышения наружного рельса. При этом центробежные и ветровые нагрузки, поперечные составляющие продольных сжимающих сил считаются направленными наружу кривой. Во втором случае рассматривают движение вагона в режиме тяги с малой скоростью. При этом ветровые нагрузки, поперечные составляющие от силы веса и силы тяги, считаются направленными внутрь кривой. В обоих случаях учитывают «обезгрузку» тележек от вертикальных составляющих продольных сил из-за возможной разности высот автосцепок соседних вагонов.
Коэффициент запаса устойчивости от опрокидывания определяется по формуле
К =—1
ус рL y°J
доп
где Рст — вертикальная квазистатическая нагрузка от колеса на рельс с учетом обезгруз- ки при действии вертикальных составляющих продольных сил; Рдоп — вертикальная квазистатическая нагрузка от колеса на рельс с учетом обезгрузки от действия поперечных составляющих продольных и вертикальных сил.
Допустимые значения коэффициента запаса см. в табл. 13.4.
Аэродинамика подвижного состава изучает взаимодействие воздушной среды и высокоскоростного поезда. Особенностью аэродинамики поезда в отличие от аэродинамики самолетов является то, что движе-
Дата добавления: 2019-11-16; просмотров: 1265; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!