Аналитические условия равновесия произвольной системы сил
(шесть уравнений статики абсолютно твердого тела)
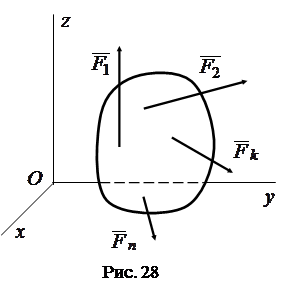 |
Пусть на твердое тело, находящееся в равновесии, действует система сил
 (рис. 28).
(рис. 28).
Выберем произвольную систему координат и обозначим проекции сил на оси координат:
 ,
,  ,
, 
 .
.
Главный вектор этой системы сил:
 .
.
Его проекции на оси координат:
 ,
,
 ,
,
 .
.
Главный момент вычислим относительно полюса, находящегося в начале координат:
 .
.
Главный момент относительно полюса в начале координат проектируем на каждую из осей координат:
 .
.
На основании теоремы о связи между моментами силы относительно полюса и оси:
 ,
,
 ,
,
 .
.
По основной теореме статики для равновесия тела под действием произвольной системы сил необходимо и достаточно, чтобы были равны нулю главный вектор и главный момент относительно произвольного полюса, то есть
 , (I)
, (I)  , (II)
, (II)
Векторное равенство (I) эквивалентно трем скалярным:
1.  ,
,
2.  ,
,
3.  .
.
Векторное равенство (II) так же эквивалентно трем скалярным:
4.  ,
,
5.  ,
,
6.  .
.
На основании полученного результата основная теорема статики может быть сформулирована так:
Для того, чтобы твердое тело под действием произвольной системы сил находилось в равновесии необходимо и достаточно, чтобы сумма проекций всех сил на каждую из осей координат и сумма моментов всех сил относительно каждой из осей координат равнялась нулю, то есть чтобы выполнялись шесть уравнений статики:
1.  , 4.
, 4.  ,
,
2.  , 5.
, 5.  ,
,
3. , 6.  .
.
Частные случаи аналитических условий равновесия
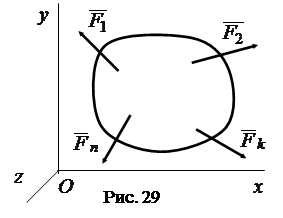 1. Плоская система произвольно расположенных сил (все силы лежат в одной плоскости).
1. Плоская система произвольно расположенных сил (все силы лежат в одной плоскости).
Выберем оси координат так, чтобы оси  и
и  лежали в плоскости сил (рис. 29). В этом случае из шести уравнений статики 3-е, 4-е, 5-е удовлетворяются тождественно. Уравнениями равновесия являются три:
лежали в плоскости сил (рис. 29). В этом случае из шести уравнений статики 3-е, 4-е, 5-е удовлетворяются тождественно. Уравнениями равновесия являются три:
1. ,
2.  ,
,
3.  .
.
Для того, чтобы тело под действием плоской системы произвольно расположенных сил находилось в равновесии, необходимо и достаточно, чтобы выполнялись три уравнения статики: два уравнения проекций на оси, лежащие в плоскости сил и дно уравнение моментов относительно оси, перпендикулярной плоскости сил.
1. Плоская система параллельных сил.
 Оси координат выбираем так, чтобы оси и лежали в одной плоскости с силами, причем ось
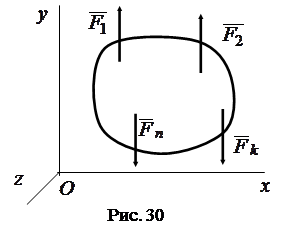
Оси координат выбираем так, чтобы оси и лежали в одной плоскости с силами, причем ось  параллельна силам (рис. 30). Это частный случай произвольной плоской системы сил. Из трех уравнений произвольной плоской системы сил первое выполняется тождественно, а уравнениями равновесия остаются следующие два:
параллельна силам (рис. 30). Это частный случай произвольной плоской системы сил. Из трех уравнений произвольной плоской системы сил первое выполняется тождественно, а уравнениями равновесия остаются следующие два:
1.  .
.
2.  .
.
Для того, чтобы тело под действием плоской системы параллельных сил находилось в равновесии, необходимо и достаточно, чтобы выполнялись два уравнения равновесия: уравнение проекций на ось, параллельную силам и уравнение моментов относительно оси, перпендикулярной плоскости сил.
3. Пространственная система параллельных сил.
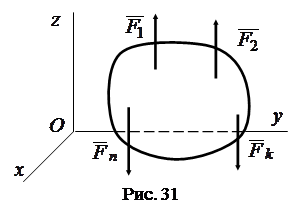 Выберем оси координат так, чтобы ось
Выберем оси координат так, чтобы ось  была параллельна силам. В этом случае из шести уравнений статики 1-е, 2-е, 6-е удовлетворяются тождественно, а уравнениями равновесия остаются следующие три:
была параллельна силам. В этом случае из шести уравнений статики 1-е, 2-е, 6-е удовлетворяются тождественно, а уравнениями равновесия остаются следующие три:
1.  ,
,
2.  ,
,
3.  .
.
Для того, чтобы тело под действием пространственной системы параллельных сил находилось в равновесии, необходимо и достаточно, чтобы выполнялись три уравнения статики: уравнение проекций на ось, параллельную силам и два уравнения моментов относительно осей, перпендикулярных силам.
4. Система сходящихся сил.
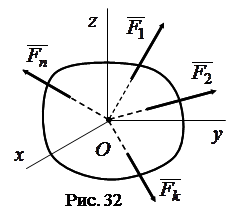 |
Выберем начало координат в точке схода (рис. 32) Так как моменты сил относительно осей координат равны нулю, то уравнения 4,5,6 выполняются тождественно. А уравнениями равновесия остаются первые три (они уже были получены ранее).
1. , 2. , 3.  .
.
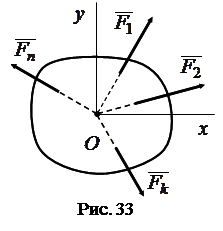 4. Плоская система сходящихся сил.
4. Плоская система сходящихся сил.
Линии действия всех сил пересекаются в точке  , и все силы лежат в плоскости
, и все силы лежат в плоскости  (рис. 33). Уравнениями равновесия такой системы являются:
(рис. 33). Уравнениями равновесия такой системы являются:
1.  ,
,
2. . ,
Дата добавления: 2019-02-12; просмотров: 342; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!