Внешние относительно системы силы
ГЛАВА 6. ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ДВИЖЕНИЙ
ЧЕЛОВЕКА
1. . Инерционные характеристики.
2. . Силовые характеристики.
3. . Внешние относительно системы силы.
4. . Внутренние относительно системы силы.
5. . Динамические особенности в движениях человека.
Инерционные характеристики
Понятие об инертности
Инертность (или инерция) свойство физических тел, проявляющееся в сохранении движения, а также изменении его под действием сил.
Физическое тело, взаимодействуя с другими телами, может изменить свое движение. Если же никакого взаимодействия с другими телами нет, то нет приложенных к телу сил и движение его не изменяется (в инерциальной системе отсчета).
Сохранять «состояние покоя или равномерного и прямолинейного движения» (первый закон Ньютона) это значит сохранять неизменной по величине и направлению скорость (в частном случае равную нулю состояние покоя) (рис. 29).
Ускорение (как мера изменения скорости) возникает только при действии других тел, когда приложены силы. В природе невозможно движение вне воздействия других тел, поэтому способность сохранять движение проявляется как способность к его изменению (ускорению) под действием силы, причем постепенному и различному для разных тел.
Например, снаряд, выпущенный метателем, продолжает «по инерции» полет его движение сохраняется. Но в результате сопротивления воздуха и притяжения Земли движение изменяется снаряд падает, а не улетает равномерно и прямолинейно в мировое пространство.
|
|
|
Инертность характеризует определенные черты поведения тел, показывает, как сохраняется движение, как оно изменяется под действием сил быстрее или медленнее.
Закон инерции, открытый еще Галилеем и сформулированный Ньютоном, описывает свойство материальной точки и тел, движущихся поступательно. Он по своей сути применим и для тел, движущихся вращательно. Биомеханические системы также подчиняются этому закону.

Рис. 29. Законы Ньютона
Масса тела
Масса – это мера инертности тела при поступательном движении. Она измеряется при движении материальной точки и поступательном движении тела или системы тел отношением величины приложенной силы к величине вызываемого ею ускорения:
m = F / a.
Измерение массы в этом случае основывается на втором законе Ньютона (сила, действующая на тело, равна произведению массы тела на создаваемое этой силой ускорение, причем направления силы и ускорения совпадают). Масса здесь – коэффициент пропорциональности между силой и ускорением.
Если к одному и тому же телу приложены разные силы, то изменения его движения будут различными. Отношение же силы к вызываемому ею ускорению в каждом случае постоянно – оно равно его массе.
|
|
|
Для решения ряда задач мало знать, какова величина массы тела, надо учитывать, как распределены в теле материальные частицы, обладающие массами. Это отчасти характеризуется положением центра масс, или центра тяжести.
Момент инерции тела
Момент инерции – это мера инертности тела относительно оси при вращательном движении (реальном или воображаемом) вокруг этой оси. Момент инерции количественно равен сумме моментов инерции частиц тела произведений масс частиц на квадраты их расстояний от оси вращения:
J = ^mr2.
Когда частицы тела находятся дальше от оси вращения, то угловое ускорение тела под действием того же момента силы меньше; если частицы ближе к оси, то угловое ускорение больше. Значит, если приблизить тело (все в целом или его части) к оси, то легче вызвать угловое ускорение, разогнать тело во вращении и остановить его. Этим пользуются при движении вокруг оси.
Найдя опытным путем момент инерции тела, можно рассчитать радиус инерции, на величине которого отражается распределение частиц в теле относительно данной оси.
Радиус инерции это сравнительная мера инертности данного тела относительно его разных осей. Он измеряется корнем квадратным из отношения момента инерции относительно данной оси к массе тела:
|
|
|
Количественное определение моментов инерции в биомеханике не всегда достаточно точно. Но для понимания физических основ движений человека учитывать эту характеристику необходимо.
Силовые характеристики
Сила
Сила это мера механического воздействия одного тела на другое. Численно она определяется произведением массы тела на его ускорение, вызванное приложением этой силы: F = ma .
Таким образом, измерение силы, как и измерение массы, основано на втором законе Ньютона. Поскольку этот закон раскрывает зависимости в поступательном движении, то и сила как вектор определяется только в случае такого простейшего вида движения по массе и ускорению.
Источники сил. Уже указывалось, что ускорение зависит от системы отсчета. Поэтому и сила, определяемая по ускорению, тоже зависит от системы отсчета. В инерциальной системе отсчета источником силы для данного тела всегда служит другое материальное тело.
Коль скоро взаимодействуют два материальных объекта, то в этих условиях проявляется третий закон Ньютона: «Действию всегда существует равное противодействие, иначе говоря, действия двух тел друг на друга всегда равны и противоположны по направлению».
|
|
|
Если на одно тело действует другое тело, то оно изменяет движение первого. Но и первое тело в этом взаимодействии также изменяет движение другого. Обе силы приложены к разным объектам, каждая проявляет соответствующий эффект. Их нельзя заменить одной равнодействующей, поскольку они приложены к разным объектам. Именно поэтому они друг друга и не уравновешивают.
В неинерциальной системе отсчета рассматривают кроме взаимодействий двух тел еще особые силы инерции («фиктивные»), для которых третий закон Ньютона не применим.
Измерение сил. Применяется статическое измерение силы, т. е. измерение при помощи уравновешивающей силы (когда ускорение равно нулю), и динамическое – по ускорению, сообщаемому телу ее приложением.
При статическом действии силы на данное тело (М) действуют два тела (А и В); всего имеется три материальных объекта. Силы F А и F В, приложенные к телу М, равны по величине и противоположны по направлению, они взаимно уравновешиваются. Их равнодействующая равна нулю. Ускорение, вызванное ими, также равно нулю. Скорость не изменяется (остается постоянной – равномерное движение или относительная неподвижность) (рис. 30).

Рис. 30. Равновесие сил
Силу FA , действующую статически, можно измерить уравнове шивающей ее силой F В .
Рассмотрим три случая проявления статического действия силы, когда все тела неподвижны:
а) гимнаст в висе на перекладине; опорная реакция уравновешивает
силу тяжести тела ( G );
б) уравновешенное тело движется перпендикулярно уравновешенной
силе тяжести – конькобежец скользит по льду; опорная реакция
уравновешивает силу тяжести тела (G); последняя прямо не влияет
на скорость скольжения;
в) уравновешенное тело по инерции движется по направлению дей
ствия уравновешенной силы; горнолыжник скользит с постоянной
скоростью по склону; силы сопротивления (воздуха и трения лыж
по снегу – Q) уравновешивают скатывающую составляющую силы
тяжести (G). Во всех трех случаях вне зависимости от состояния
покоя или направления движения тела уравновешенная сила не из
меняет движения; скорости в направлении ее действия постоянны.
Следует подчеркнуть, что во всех случаях статическое действие силы вызывает деформацию тела.
При динамическом действии силы на данное тело М действует неуравновешенная сила. В задачах по теоретической механике часто рассматривается лишь эта одна движущая сила как мера действия лишь одного движущего тела.
Движущая сила – это сила, которая совпадает с направлением движения (попутная) или образует с ним острый угол и при этом может совершать положительную работу (увеличивать энергию тела).
Однако в реальных условиях движений человека всегда существует среда (воздух или вода), действуют опора и другие внешние тела (снаряды, инвентарь, партнеры, противники и др.). Все они могут оказывать тормозящее действие. Более того, ни одного реального движения без участия тормозящих сил просто не бывает.
Тормозящая сила направлена противоположно направлению движения (встречная) или образует с ним тупой угол. Она может совершать отрицательную работу (уменьшать энергию тела).
Часть движущей силы, равная по величине тормозящей, уравновешивает последнюю – это уравновешивающая сила (Fyp).
Избыток же движущей силы над тормозящей – ускоряющая сила ( F уск ) – вызывает ускорение тела с массой m согласно второму закону Ньютона (Fy = ma).
Следовательно, скорость не остается постоянной, а изменяется, т. е. возникает ускорение. Это и есть динамическое действие силы F .
Силу Fуск, действующую динамически, можно измерить по массе тела и его ускорению.
Классификация сил
Силы, которые изучают при анализе движений человека, в зависимости от общих признаков делятся на группы. По способу взаимодействия тел все силы делятся на дистантные, возникающие на расстоянии без непосредственного соприкосновения тел, и контактные, которые возникают лишь при соприкосновении тел.
К дистантным силам в механике относят силы всемирного тяготения, из которых в биомеханике изучаются силы земного тяготения, проявляющиеся в силах тяжести. Контактные силы включают упругие силы и силы трения.
По влиянию на движение различают силы активные (или задаваемые) и реакции связи. Напоминаем, что связи – это ограничения движения объекта, осуществляемые другими телами. Сила, с которой связь противодействует движению, и представляет собою реакцию связи. Она заранее неизвестна и зависит от действия на тело других сил и движения самого тела.
Реакции связи сами по себе не вызывают движения, они только противодействуют активным силам или уравновешивают их. Если же реакции связи не уравновешивают активных сил, тогда и начинается движение под действием последних.
По источнику возникновения относительно системы (например, тела человека) силы различают внешние, вызванные действием тел внешних относительно системы, и внутренние, вызванные взаимодействиями внутри системы. Это деление необходимо при определении возможностей действия тех или иных сил. Одну и ту же силу следует считать внешней или внутренней в зависимости от того, относительно какого объекта мы ее рассматриваем.
По способу приложения силы в механике делят на сосредоточенные, приложенные к телу в одной точке, и распределенные. Последние делят на поверхностные и объемные.
По характеру силы бывают постоянные и переменные. В качестве примера постоянной силы можно назвать силу тяжести (в данном пункте Земли). Одна и та же сила может изменяться в зависимости от нескольких условий. Практически в движении человека постоянные силы почти не встречаются. Все силы переменные. Они меняются в зависимости от времени (мышца с течением времени изменяет силу тяги), расстояния (в разных пунктах Земли даже «постоянная сила» тяжести различна), скорости (сопротивление среды зависит от относительной скорости тела и среды).
Поскольку в биомеханике особенно важно взаимодействие тела человека с внешним окружением, вызываемое движениями частей тела, далее будут подробно рассмотрены силы внешние и внутренние относительно системы (тела человека). Взаимодействие физических объектов – главная причина изменения движений. Поэтому мере взаимодействия – силе – в биомеханике уделяется особое внимание.
Момент силы
Момент силы – это мера механического воздействия, способного поворачивать тело (мера вращающего действия силы). Он численно определяется произведением модуля силы на ее плечо (расстояние от центра момента до линии действия силы).
Момент силы имеет знак плюс, если сила сообщает вращение против часовой стрелки, и минус при обратном его направлении.
Вращающая способность силы проявляется в создании, изменении или прекращении вращательного движения.
Полярный момент силы (момент силы относительно точки) может быть определен для любой силы относительно этой точки (О) (центр момента). Если расстояние от линии действия силы до избранной точки равно нулю, то и момент силы равен нулю. Следовательно, расположенная таким образом сила не обладает вращающей способностью относительно этого центра. Площадь прямоугольника (Fd) численно равна модулю момента силы.
Когда несколько моментов силы приложено к одному телу, их можно привести к одному моменту – главному моменту.
Для определения вектора момента силы надо знать:
а) модуль момента (произведение модуля силы на ее плечо);
б) плоскость поворота (проходит через линию действия силы и
центр момента);
в) направление поворота в этой плоскости.
Осевой момент силы (момент силы относительно оси) может быть определен для любой силы, кроме совпадающей с осью, ей параллельной или ее пересекающей. Иначе говоря, сила и ось не должны лежать в одной плоскости.
Применяют статическое измерение момента силы, если его уравновешивает лежащий в той же плоскости, равный ему по модулю и противоположный по направлению момент другой силы относительно того же центра момента (например, при равновесии рычага). Моменты сил тяжести звеньев относительно их проксимальных суставов называют статическими моментами звеньев.
Применяют динамическое измерение момента силы, если известны момент инерции тела относительно оси вращения и его угловое ускорение. Как и силы, моменты сил относительно центра могут быть движущими и тормозящими, а стало быть, и уравновешивающими, ускоряющими и замедляющими. Момент силы может быть и отклоняющим – отклоняет в пространстве плоскость поворота.
При всех ускорениях возникают силы инерции: при нормальных ускорениях – центробежные силы инерции, при касательных (положительных или отрицательных) – касательные силы инерции. Центробежная сила инерции направлена по радиусу вращения и не имеет момента относительно центра вращения. Касательная же сила инерции приложена для твердого звена в центре его качаний. Таким образом, имеется момент силы инерции относительно оси вращения.
Действие силы
Сила, приложенная к телу, если она не уравновешена, изменяет его движение.
Меры действия силы могут быть определены: а) с учетом промежутка времени ее действия импульс силы или б) с учетом пути ее действия работа силы. Обе эти меры как бы взаимно дополняют друг друга, отражая действие силы во времени и в пространстве.
Импульс силы это мера механического воздействия на тело со стороны других материальных объектов за данный промежуток времени. Он равен в поступательном движении произведению силы на время ее действия:
S = FAt .
Работа силы это мера механического воздействия на тело со стороны других материальных объектов на данном пути. Она равна в поступательном движении произведению модулей той составляющей силы, которая действует в направлении движения, и перемещения точки приложения силы:
A = Fbs .
В случае, если сила направлена под углом к перемещению, надо произведение модулей силы и перемещения помножить еще на косинус угла между их направлениями. Работа силы положительная, когда этот угол острый, и, следовательно, сила ускоряет движение. Работа силы отрицательная, если угол тупой и сила замедляет движение. При прямом угле косинус равен нулю и работа равна нулю: сила работы не совершает.
Соответственно различают меры изменения движения как результата действия силы:
а) количество движения тела;
б) кинетическую энергию тела.
Количество движения тела это мера поступательного движения, характеризующая его способность передаваться от одного тела к другому в виде механического же движения. Она определяется при поступательном движении произведением массы тела и его скорости:
K = mv .
Изменение количества движения за промежуток времени и равняется суммарному импульсу сил, приложенных к телу на том же промежутке времени.
Можно сказать, что количество движения тела это мера его способности двигаться в течение некоторого времeни против действия тормозящей силы.
Кинетическая энергия тела – это мера механического движения, характеризующая его способность превращаться в потенциальную или другие виды энергии. Кинетическая энергия тела равна при поступательном движении половине произведения массы тела на квадрат его скорости:
Ek = mv2 / 2.
Изменение кинетической энергии тела на некотором пути перемещения равняется работе приложенных к нему сил на этом же пути. Следовательно, совершенная работа равна приращению кинетической энергии.
Можно сказать, что кинетическая энергия тела – это мера его способ ности проходить некоторый путь против действия тормозящей силы.
Теперь посмотрим, как действуют силы и какой эффект они вызывают во вращательном движении (рис. 31), характерном для звеньев тела человека. Зависимости мер изменения движения от мер действия сил во вращательном движении по физической сущности такие же, как и в поступательном.

Рис. 31. Вращательное движение тела
Импульс момента силы характеризует действие силы, а вызванное им изменение движения измеряется кинетическим моментом (моментом количества движения).
Импульс момента силы – это мера механического воздействия на тело других объектов (во вращательном движении) за данный промежуток времени. Импульс момента равен произведению момента силы и длительности его действия:
Sz = Mz(F)t.
В случае переменного момента силы нужно суммировать элементарные импульсы моментов сил относительно некоторого центра.
Кинетический момент (момент количества движения) это мера вращательного движения, характеризующая его способность передаваться от одного тела к другому в виде механического же движения. Кинетический момент равен произведению момента инерции относительно оси вращения и угловой скорости тела:
Kz = Jco .
Определения работы момента силы и кинетической энергии вращательного движения аналогичны определениям соответствующих величин для поступательного движения. Только вместо массы в уравнения входит момент инерции и вместо линейных перемещения и скорости угловые.
Если скорость и ускорение служат кинематическими мерами изменения движения, то количество движения (а также кинетический момент) и кинетическая энергия динамическими мерами изменения движения.
Следует подчеркнуть, что, хотя в характеристиках поступательного и вращательного движений немало общего, меры их (кинематические и динамические) все (кроме временных) различны.
Внешние относительно системы силы
Для того чтобы отнести силы к внешним или внутренним, надо установить прежде всего, относительно какой системы объектов эти силы рассматриваются. В биомеханике такой системой, естественно, считают тело человека. Но иногда бывает целесообразно расширить систему (например, велосипедист велосипед) или ограничить ее (например, тело прыгуна в воду рассматривают как две связанные системы верхнюю и нижнюю половины по весу тела. Тяги мышц, соединяющих эти системы, можно рассматривать как внешние для них силы).
Внешние относительно системы силы мера воздействия на нее объектов окружающей среды.
Внешние силы обладают особенностями, значение которых важно для понимания динамики. Они могут быть мысленно приложены к центру тяжести системы как изменяющие его движение, могут изменять и ее кинетический момент, что невозможно для внутренних сил. В этом главный смысл разделения сил на эти группы (внешние и внутренние силы).
В числе внешних для тела человека сил будут рассмотрены: дистантные силы (тяжести) и контактные (силы веса и инерции внешних тел, сопротивления среды, реакции опоры, трения и упругой деформации).
Сила тяжести и вес
Сила тяжести тела – это мера притяжения тела к Земле с учетом уменьшения силы притяжения вследствие суточного вращения планеты. Сила тяжести тела равна геометрической (векторной) сумме гравитационной и инерционной (центробежной) сил и приложена как равнодействующая всех сил тяжести частиц тела к его центру тяжести (рис. 32).
Все тела на планете находятся в поле земного тяготения. Тело массы т притягивается Землей массы М с силою F по линии, соединяющей их центры масс.
Сила тяготения зависит только от масс и расстояния. Для определения величины силы тяжести применяется статическое измерение – по действию тела на площадку пружинных весов. Под действием силы тяжести тело само оказывает давление на опору (нижнюю или верхнюю) – проявляется вес тела.
Вес тела (статический) – это мера его воздействия в покое на поко ящуюся же связь (опору, подвес) как на препятствие, мешающее падению.
Рычажные весы с гирями не улавливают различия в весе, связанного с местоположением пункта взвешивания, поскольку вес гирь изменяется так же, как вес тела.
|
|

| Рис. 32. Сила тяжести и вес тела |
Для определения величины силы применяется также динамическое измерение – по ускорению свободно падающего тела (для технических расчетов принимают 981 см/с). В разных пунктах Земли это ускорение различно, но в некоторых практических задачах это различие можно не учитывать. Для приближенных расчетов (в учебных заданиях) его считают равным 9,8 или даже 10,0 м/с.
Сила тяжести тела человека и вес удерживаемых им тел вызваны земным тяготением и поэтому служат для человека внешними силами.
Поскольку вес (как и сила тяжести) изменяется от ускорения тела, различают статический (тело покоится) и динамический вес. Последний есть геометрическая сумма статического веса и силы инерции при ускорении по вертикали. Например, при приседании или отталкивании силы инерции направлены против ускорения. Они или увеличивают, или уменьшают динамический вес тела (его общую силу давления на опору).
На горизонтальной плоскости сила тяжести (G) вызывает опорную реакцию ( R ); обе силы взаимно уравновешены. На наклонной плоскости составляющие силы тяжести соответственно вызывают опорную реакцию RN и силу трения Т. Вне опоры сила тяжести вызывает у всех звеньев свободно падающего тела одинаковое ускорение, поэтому на взаимное расположение и относительное движение частей тела в полете она не влияет. Поскольку тело не действует на опору, то нет веса – тело находится в состоянии невесомости.
Итак, сила тяжести тела действует:
а) на опору в покое – как статический вес;
б) на опору пpи вертикальном ускорении – как динамический вес;
в) вне опоры – как причина ускорения свободно падающего тела.
В положении на опоре силы тяжести либо проходят через оси суставов тела и тянут части тела вниз, либо действуют на плече силы тяжести (d) и обладают моментом относительно оси сустава (G). Так же действуют на тело человека своим весом и внешние тела, удерживаемые или приводимые в движение человеком. Стало быть, при опоре вес звеньев тела и отягощений всегда влияет на расположение и движение звеньев тела. Изменять статический вес внешних тел и своих частей тела человек не может, но изменять моменты сил тяжести, а также динамический вес можно и иногда нужно – в зависимости от задачи движения и конкретных условий.
Силы инерции внешних тел
Сила инерции внешнего тела в инерциальной системе отсчета (ре альная сила) – это мера действия на тело человека со стороны тела, ускоряемого им. Она равна произведению массы внешнего тела на его
ускорение, направлена в сторону, противоположную ускорению, и при ложена к рабочей точке тела человека (место его контакта с ускоряемым телом или опорой).
При движениях человек, изменяя скорость внешних тел, сообщает им ускорение. Как противодействие ускоряющей силе действия человека возникает внешняя сила инерции ускоряемых тел. Сила инерции внешнего тела, действующая на тело человека, – это реакция, испытываемая телом человека со стороны ускоряемого тела, которому он, и только он сообщает ускорение. При толкании штанги возникает ее ускорение от груди и рук, направленное вверх (рис. 33, а). Сила инерции штанги, приложенная к груди и рукам, обусловлена ускоряющей силой F, равна ей по величине и направлена противоположно (вниз); она складывается с весом штанги. Если атлет замедляет движение штанги, направленное вниз (опуская ее на помост), то ускорение штанги также направлено вверх. Сила же инерции штанги, как и ее вес, направлена вниз и приложена к рукам атлета (рис. 33, б).
Силы инерции как внешние силы проявляются также при замедлении человеком движения внешних тел, т. е. при их торможении. Примером проявления сил инерции может быть, в частности, действие внешних материальных объектов, в том числе жидкостей, газов – удар волны, порыв ветра.
Все это – примеры реальной (ньютоновой) силы инерции, отсчитываемой в инерциалыюй системе отсчета и приложенной к ускоряющему телу со стороны ускоряемого в поступательном движении.
При искривлении траектории внешнего тела силой человека во вращательном движении центробежная сила, как сила инерции вращаемого тела (равная по модулю центростремительной тяге спортсмена), направлена по радиусу от центра и приложена к рабочей точке тела человека (рис. 30, в).
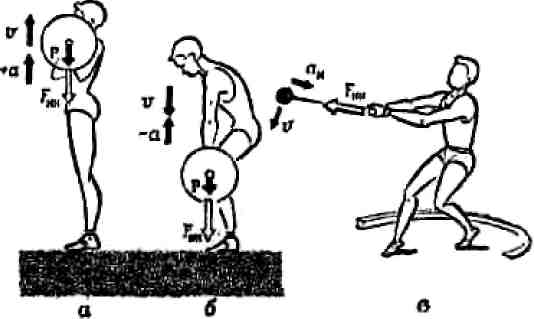
Рис . 33. Сила инерции : а, б, в – реальная при ускорениях: а – положительном,
б – отрицательном, в – нормальном
Во вращательном движении полная сила инерции тела составляется из тангенциальной составляющей при угловом ускорении и нормальной – при центростремительном ускорении.
Силы сопротивления среды
Давление в газе или жидкости – это мера силы механического воз действия между элементами данной среды и элементами среды и дру гими телами. Оно равняется отношению силы к той площади, через которую осуществляется воздействие (рис. 34). Для всякой площадки в среде направление силы действия одного элемента среды на другой только нормальное (перпендикулярное площадке).

Рис . 34. Силы сопротивления среды : a – статическая (выталкивающая, Q ); б, в – динамические; б – лобового сопротивления, в – подъемная ( Ry )
В каждой точке среды величина давления одинакова для всех направлений, к которым это давление отнесено. Давление во всех точках среды, лежащих в одной горизонтальной плоскости, одно и то же. Давления по вертикали (в случае покоя среды) распределяются так, что разность давлений (F2 – F1) равна весу вертикального столба среды (G).
Человек всегда находится и передвигается в какойлибо среде – либо воздушной, либо водной. Он вступает в механическое взаимодействие со средой. Силы ее действия могут проявляться статически (аэрои гидростатика), например выталкивающая сила (по закону Архимеда),
или динамически (аэро и гидродинамика), например подъемная сила в потоке воздуха или воды.
Выталкивающая сила это мера действия среды на погруженное в нее тело. Выталкивающая сила равна геометрической (векторной) сумме сил, действующих на все элементы поверхности тела; она всегда равна по модулю весу вытесненного объема жидкости или газа и направлена вверх.
Если тело весит больше, чем вытесненная им вода, то оно будет тонуть; при обратном соотношении будет всплывать.
Когда тело движется в среде, возникают дополнительные силы, зависящие в основном от величины его скорости относительно среды (относительной скорости), формы тела, его ориентации по направлению относительного движения и свойств среды.
Движение тела в среде (или среды относительно тела) характеризуется линиями тока. Это линии, в каждой точке которых скорость частиц среды касательна. Скорости касательны и к линиям тока, и к траекториям частиц. Но линии тока характеризуют направления скорости разных частиц в данный момент времени, а траектории направления скорости одних и тех же частиц в различные моменты времени. Только при постоянном распределении скоростей линии тока и траектории частиц совпадают. Тело полностью обтекаемо, если линии тока расположены одинаково сверху и снизу тела, а также спереди и сзади. Правда, давление на тело с разных сторон различно. По закону Бернулли, где скорость потока возрастает, давление уменьшается, и наоборот. Именно этим и объясняются изменения давлений (дополнительные силы).
Но это объяснение достаточно только для идеальной среды, в которой отсутствует внутреннее трение (вязкость). Вследствие вязкости обтекание всегда неполное, и поэтому возникает лобовое сопротивление.
Лобовое сопротивление это сила, с которой среда препятствует относительному движению в ней тела. Лобовое сопротивление при относительно небольших скоростях приближенно:
Rx = SCxPv2,
где S площадь поперечного сечения (миделево сечение, или мидель), равная площади проекции тела на плоскость, перпендикулярную потоку; Сх коэффициент лобового сопротивления, который зависит от формы тела (обтекаемости) и его ориентации относительно потока; р плотность среды (воды 1000 кг/м3, воздуха 1,3 кг/м3; разница в плотности этих сред почти в 780 раз); v относительная скорость потока и тела.
Перед телом давление повышено, так как скорость тока снижена (поджатие). Сзади тела силы трения вызывают отрыв потока от стенок тела, возникают завихрения, создается зона пониженного давления
(разрежение). Равнодействующая сил давления на тело спереди и сзади направлена назад и тормозит движение тела.
Тело с более обтекаемой формой имеет меньше завихрений сзади. Поэтому сопротивление среды может в зависимости от формы тела снизиться при прочих равных условиях в десятки раз (см. рис. 34, б).
Таким образом, лобовое сопротивление зависит от разности дав лений спереди и сзади тела в потоке (сопротивление формы) и трения между телом и пограничным слоем среды (сопротивление трения).
Когда поверхность тела образует угол с направлением потока (угол атаки а), возникает еще подъемная сила (R, см. рис. 34, в). При этом давление снизу тела несколько больше давления в потоке, а давление сверху тела намного меньше; тело не столько подпирается снизу, сколько «подсасывается» кверху.
Подъемная сила это сила, действующая со стороны среды на тело, расположенное под углом к потоку. Подъемная сила зависит от тех же факторов, что и лобовое давление: Ry = SCypv 2 , где Су коэффициент подъемной силы.
Подъемная сила увеличивается в известных пределах с увеличением угла атаки, а потом начинает падать.
Равнодействующая лобового давления и подъемной силы (она же равнодействующая сил давления и трения) при движении в воздухе называется полной аэродинамической силой.
Лобовое сопротивление среды тормозит продвижение вперед, например при полете, плавании, скольжении, беге. Подъемная сила поддерживает тело, например тело прыгуна на лыжах с трамплина в полете, пловца в воде при продвижении его по дистанции.
Реакции опоры
Реакции опоры это мера противодействия опоры при давлении на нее со стороны покоящегося или движущегося при контакте с ней тела. Реакция опоры равна по величине силе, с которой тело действует на опору, направлена в противоположную этой силе сторону и приложена к телу в той точке, через которую проходит линия силы, действующей на опору.
Нормальная (или идеальная) реакция опоры при действии веса тела на горизонтальную поверхность направлена вертикально вверх. Во всех случаях она перпендикулярна плоскости, касательной той поверхности, которая служит опорой в точке приложения силы.
Человек может оказывать действие на опору не только по нормали к ней, но и под острым углом. Тогда направление полной реакции опоры не совпадает с нормалью. Горизонтальная составляющая полной
реакции опоры называется силой трения, если поверхности, соприкасающиеся при опоре, ровные (без выступов).

Рис . 35. Силы опорной реакции : 1, 6 – статические; 2, 4 – уменьшенные;
3, 5 – увеличенные
Человек, находящийся на опоре (нижней или верхней), действует на нее статическим весом. В этом случае реакция опоры статическая и равна весу тела (рис. 35). При движении с ускорением частей тела человека, опирающегося на опору, возникает сила инерции тела человека, которая геометрически суммируется с его весом. Увеличенную или уменьшенную опорную реакцию обычно называют динамической. Но правильнее говорить здесь о добавлении к статической еще и динамической составляющей опорной реакции, вызванной теми усилиями, которые определяют ускорение тела.
Линия действия силы опорной реакции при неподвижном положении тела на опоре или же под опорой проходит через ОЦТ тела человека. Однако при движениях человека линия действия как нормальной, так и полной опорной реакции (равнодействующая нормальной реакции и силы трения по всем направлениям) почти никогда не проходит через ОЦТ.
Для анализа действия сил на наклонной плоскости опорная реакция может быть разложена на нормальную составляющую (перпендикулярную плоскости) и касательную составляющую (параллельную плоскости). Первая противодействует нормальной составляющей силы тяжести, вторая (сила трения) – силе, вызывающей скольжение тела.
Силы трения
Сила трения – это мера противодействия движению, направленному по касательной к поверхности прикасающегося тела. Величина силы трения (как составляющей реакции поверхности связи) зависит от воздействия движущегося или смещаемого тела; она направлена против скорости или смещающей силы и приложена в месте соприкосновения.
Силы трения (касательные реакции) возникают между соприкасающимися телами во время их движения друг относительно друга (рис. 33).
Различают три вида трения: трение скольжения, качения и верчения. При скольжении движущееся тело соприкасается с неподвижным одной и той же частью своей поверхности (лыжа скользит по снегу). При качении точки движущегося тела соприкасаются с другим телом поочередно (колесо велосипеда катится по треку). Верчение характеризуется движением на месте вокруг оси (волчок).

Рис . 36. Силы трения ( Т ): a – скольжения динамическая; б – скольжения статическая; в – момент трения качения
Сила трения скольжения динамическая проявляется при движении тела, приложена к скользящему телу и направлена в сторону, противоположную относительной скорости его движения. Она не зависит от величины движущей силы и приближенно пропорциональна динамическому коэффициенту трения скольжения (kдин) и силе нормального давления на опору (N):
Tдин = kдинN.
Когда поверхности полностью разделены слоем смазки, то проявляется жидкостное трение. Оно существует между слоями жидкости, а также между жидкостью и твердым телом. В противоположность сухому трению (между твердыми телами без смазки), жидкостное трение проявляется только тогда, когда есть скорость. С остановкой движущихся тел жидкостное трение исчезает, поэтому даже самая малая сила может сообщить скорость слоям жидкой среды, например при движении твердого тела в воде.
Иная картина при сухом трении. Если приложить движущую силу к покоящемуся телу, то она сможет сдвинуть тело с места лишь тогда, когда станет больше силы трения покоя, препятствующей движению. Таким образом, сухое трение и жидкостное принципиально различны.
Сила трения скольжения статическая (покоя) проявляется в покое, приложена к сдвигаемому телу, направлена в сторону, противоположную сдвигающей силе. Статическая сила трения скольжения равна сдвигающей силе, но не может быть больше предельной; последняя пропорциональна статическому коэффициенту трения скольжения (kст) и силе нормального давления (N):
Тст = kстN.
Стало быть, статическая сила трения покоя может иметь величину от нулевой до предельной (неполная и полная). Минимальная сдвигающая сила, приводящая тело в движение, больше предельной силы трения покоя.
Отношение между величиной нормальной опорной реакции (равной силе нормального давления) и предельной силой трения покоя равно тангенсу угла (а), который называется углом трения (или углом сцепления) (рис. 36, б).
Дата добавления: 2018-10-26; просмотров: 656; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!