Оценка качественных показателей работы замкнутой системы по каналу управления
Nbsp; Контрольная работа Построение области устойчивости непрерывной системы автоматического регулирования; оценка качества работы системы по каналу управления Исследуемая система 0 В.п. В.п. 1,8 0 1 1 200 52 11 1,2 0 -2 W3(p)=1,2; W2 (p)=
1.
Построение области устойчивости замкнутой системы
Передаточная функция замкнутой системы по задающему воздействию
W(p)=  =
=  =
=  (1)
(1)
Характеристический полином замкнутой системы
D(p) =  (2)
(2)
Нахождение уравнений границ устойчивости в области варьируемых параметров 
Апериодическая граница устойчивости
D(p)│p=0=2,16k2=0  k2=0 (3)
k2=0 (3)
 - уравнение апериодической границы устойчивости
- уравнение апериодической границы устойчивости
Для варьируемых параметров уравнение границы третьего типа нет
Уравнение колебательной границ устойчивости получается, если выполнить в  подстановку
подстановку
D(p)│  =200(ϳω)3+52(ϳω)2+(2,16k1+11) ϳω+2,16k2=0
=200(ϳω)3+52(ϳω)2+(2,16k1+11) ϳω+2,16k2=0
U(ω)= 52(ϳω)2+2,16k2=0
V(ω)= 200(ϳω)3+(2,16k1+11) ϳω=0 (4)
Из полученной системы находим зависимости  - уравнения колебательной границ устойчивости
- уравнения колебательной границ устойчивости
k1(ω)=  – 5 = 92,6ω2 – 5
– 5 = 92,6ω2 – 5
k2(ω)=  = 24ω2 (5)
= 24ω2 (5)
Задаемся значениями  от 0
от 0  рассчитываем . Данные расчета занесены в таблицу 1
рассчитываем . Данные расчета занесены в таблицу 1
|
|
|
Таблица 1. Колебательная граница области устойчивости
|
|
|
|
| 0 | -5.00 | 0.00 |
| 0.01 | -4.00 | 0.24 |
| 0.02 | -1.30 | 1.00 |
| 0.03 | 3.30 | 2.16 |
|
|
|
|



На рис.1 представлена граница области устойчивости исследуемой системы в плоскости варьируемых параметров .
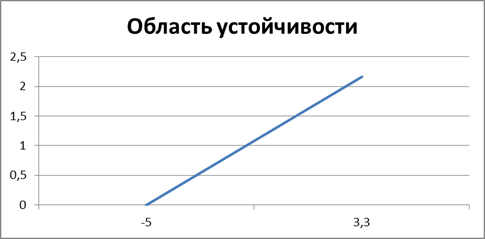
Рис. 1
Находим  для определения штриховки колебательной границы устойчивости, используя
для определения штриховки колебательной границы устойчивости, используя
=  =
=  = - 4.67 ω ˂ 0 (6)
= - 4.67 ω ˂ 0 (6)
При увеличении от 0 до , двигаясь по кривой колебательной границы снизу вверх, при этом <0 отрицателен, то штриховка правой части кривой.
Если частота меняется в пределах от - до 0 , то, согласно (5), параметры колебательной границы не меняются, однако при этом меняет знак, что видно из выражения (6)
= - 4.67( - ω) = 4.67ω ˃ 0
Поэтому, двигаясь в сторону увеличения частоты от - до 0, нужно штриховать левую часть кривой, т.е. ту же часть, что и ранее.
Расчет переходного процесса на задающее воздействие
Выбираем произвольно из области устойчивости конкретные численные значения варьируемых параметров К1 и К2 . Пусть К1=1, К2=1.
Передаточная функция замкнутой системы при подстановке в нее выбранных значений варьируемых параметров будет иметь вид:
|
|
|
 ;
;
полученное выражение Ф(р) в общем виде:
Ф(р)=  .
.
Для нашего случая имеем следующие численные значения:
R1=1,8;
R2=1,8;
D3=200;
D2=52;
D1=13,16;
D0=2,16.
Для определения момента окончания расчета на компьютере переходного процесса необходимо рассчитать предварительно его установившееся значение:
∆y= 
Расчеты в программе Cont_Rab.exe
ОТКЛОНЕНИЕ ЗАДАЮЩЕГО ВОЗДЕЙСТВИЯ ОТ НОМИНАЛА G = -2.00 замкнутая система колебательный управление
КОРНИ ХАРАКТЕРИСТИЧЕСКОГО УРАВНЕНИЯ ЗАМКНУТОЙ СИСТЕМЫ :
вещ.корень P1 = -0.20049
компл.корень P2 = -0.02976+J* 0.23018
компл.корень P3 = -0.02976-J* 0.23018
КОЭФФИЦИЕНТЫ РАЗЛОЖЕНИЯ ПЕРЕХОДНОГО ПРОЦЕССА НА ТАБЛИЧНЫЕ ДРОБИ :
C = 92.59259
Д = -48.55357
E = -44.03902
F = -47.98333
ПЕРЕХОДНЫЙ ПРОЦЕСС СИСТЕМЫ ПРИ ИЗМЕНЕНИИ ЗАДАЮЩЕГО ВОЗДЕЙСТВИЯ
ВРЕМЯ ОТКЛОНЕНИЕ ВЫХОДА СИСТЕМЫ
0.00000 0.00000
10.08201 -1.48291
20.16401 -2.15501
30.24602 -1.19331
40.32802 -1.86592
50.41003 -1.72382
60.49203 -1.49941
70.57404 -1.80417
80.65604 -1.61960
90.73805 -1.63873
100.82006 -1.72071
110.90207 -1.62743
120.98408 -1.67663
131.06609 -1.67814
141.14809 -1.64961
151.23009 -1.67759
161.31209 -1.66499
171.39409 -1.66236
181.47609 -1.67193
191.55809 -1.66371
201.64009 -1.66676
211.72209 -1.66819
221.80409 -1.66507
231.88609 -1.66744
241.96809 -1.66676
|
|
|
252.05009 -1.66615
262.13211 -1.66714
272.21411 -1.66647
282.29611 -1.66660
292.37811 -1.66684
302.46011 -1.66653
312.54211 -1.66671
322.62411 -1.66670
332.70612 -1.66661
342.78812 -1.66671
352.87012 -1.66666
362.95212 -1.66665
373.03412 -1.66668
383.11612 -1.66666
393.19812 -1.66667
Запишем аналитические выражения рассчитываемого переходного процесса в операторной и временной форме записи, используя данные, выводимые
Cont_Rab.exe. Для рассматриваемого примера получим:
-операторную формулу переходного процесса:
∆  =
=
= 
-временную форму записи:
∆y(t)= 
=  ) .
) .
Проверим полученное выражение ∆y(t) для начального и конечного моментов переходного процесса.
При t=0 имеем ∆y(t)=-0,018*(  =0.
=0.
При t=∞ ∆y(∞)=  .
.
Результат последнего выражения совпадает с результатом, полученным с помощью предельной теоремы Лапласса.
Оценка качественных показателей работы замкнутой системы по каналу управления
Строим графики изменения сигналов ∆y(t) и ∆g(t) согласно распечатке машинного решения для выбранных значений варьируемых параметров.

По графикам определяем основные показатели работы системы при изменении задающего воздействия.
Точность в установившемся режиме оценивается в виде ошибки:
 =∆g(∞)-∆y(∞)=-2-(-1,66)=-0,34.
=∆g(∞)-∆y(∞)=-2-(-1,66)=-0,34.
Полученная система имеет статическую ошибку, сигнал на выходе системы в установившемся режиме не равен сигналу задания.
|
|
|
Оценка быстродействия системы.
∆=0,05  0,05*1,66=0,083;
0,05*1,66=0,083;
Относительно ∆y(∞) определяем зону ∆2. По графику находим  =69с.
=69с.
Запас устойчивости оцениваем по показателям :
-перерегулирования
δ=  ;
;
-затухания за период
ξ= 
затухание мало ;
-степень колебательности
m= 
Общий вывод: Получили систему управления, обладающую статической ошибкой, имеющую малый запас устойчивости, который лежит ниже общетехнический нормативов.
Решение: Для изменения динамических свойств системы необходимо выбрать другие значения варьируемых параметров системы.
Размещено на Allbest.ru
Дата добавления: 2018-10-26; просмотров: 120; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!