Статичну характеристику якого регулятора зображено на рисунку?
| однопозиційного; + двопозиційного; трипозиційного; чотирипозиційного. | 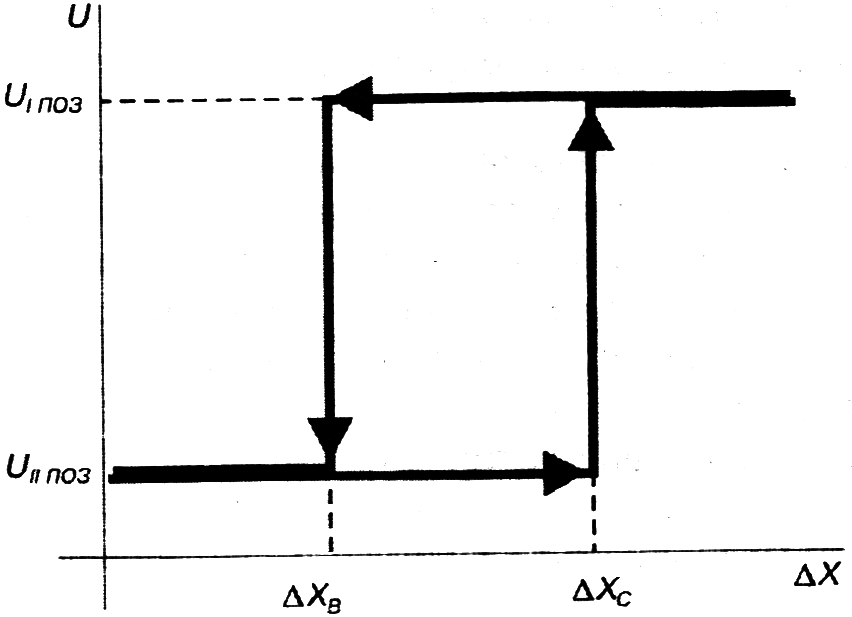
|
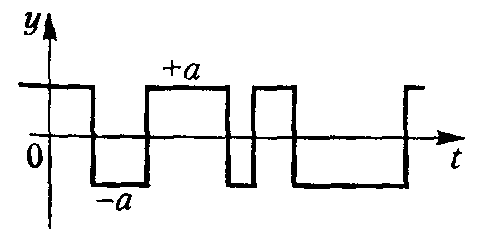
Статичну характеристику якого регулятора зображено на рисунку?
| однопозиційного; двопозиційного; + трипозиційного; чотирипозиційного. | 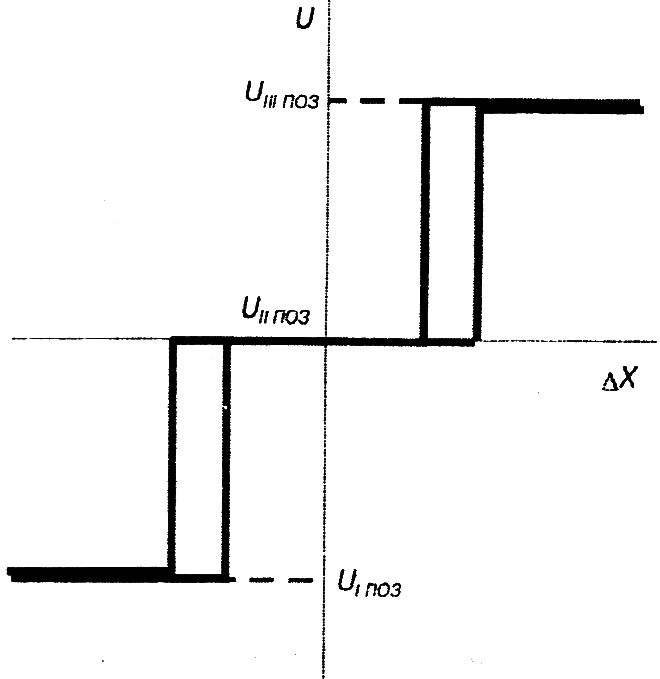
|
152. П-регулятори – це:
+ регулятори неперервної дії, які формують керуючу дію Uпропорційно відхиленню ΔX;
регулятори, які формують керуючу дію U пропорційно інтегралу відхилення ΔX;
регулятори, які формують керуючу дію U, що включає в себе пропорційну і інтегральну складові;
регулятори, які формують керуючу дію U,що включає в себе пропорційну, інтегральну та диференціальну складові;
153. І - регулятори – це:
регулятори неперервної дії, які формують керуючу дію U пропорційно відхиленню ΔX;
+ регулятори, які формують керуючу дію U пропорційно інтегралу відхилення ΔX;
регулятори, які формують керуючу дію U, що включає в себе пропорційну і інтегральну складові;
регулятори, які формують керуючу дію U, що включає в себе пропорційну, інтегральну та диференціальну складові;
154. ПІ-регулятори – це:
регулятори неперервної дії, які формують керуючу дію U пропорційно відхиленню ΔX;
регулятори, які формують керуючу дію U пропорційно інтегралу відхилення ΔX;
+регулятори, які формують керуючу дію U, що включає в себе пропорційну і інтегральну складові;
регулятори, які формують керуючу дію U, що включає в себе пропорційну, інтегральну та диференціальну складові;
|
|
|
155. ПІД-регулятори – це:
регулятори неперервної дії, які формують керуючу дію U пропорційно відхиленню ΔX;
регулятори, які формують керуючу дію Uпропорційно інтегралу відхилення ΔX;
регулятори, які формують керуючу дію U, що включає в себе пропорційну і інтегральну складові;
+ регулятори, які формують керуючу дію U, що включає в себе пропорційну, інтегральну та диференціальну складові;
156. Сигнали об'єкта керування за допомогою яких можна впливати на режим роботи об'єкта називаються
+ керувальні
вихідні
внутрішні
збурювальні
157. Сигнали, що відбивають випадкові впливи навколишнього середовища на об'єкт керування називають
керувальними
вимірюваними
внутрішніми
+ збурювальними
158. Лінійна система є повністю __________ тоді й тільки тоді, коли вона може бути переведена з будь-якого початкового стану x0 у початковий момент часу t0 в будь-який кінцевий стан x(t1)=x1 за кінцевий час t0−t1
слідкуючою
стійкою
перевідною
+ керованою
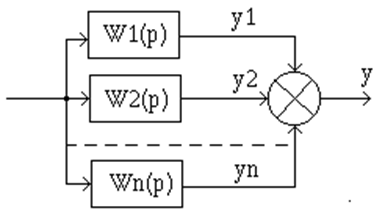
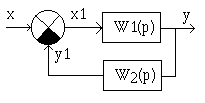
159. На схемі представлено з’єднання динамічних ланок яке називається
послідовне
+ паралельне
зустрічно-паралельне
змішане
160. Для зображеного на схемі паралельного з’єднання динамічних ланок загальна передатна функція може бути знайдена за формулою:
|
|
|
+ W(p)=W1(p)+W2(p)+…+Wn(p)
W(p)=W1(p)∙W2(p)∙…∙Wn(p)
W(p)=−W1(p)−W2(p)−…−Wn(p)
W(p)=W1(p)−W2(p)+…+Wn(p)
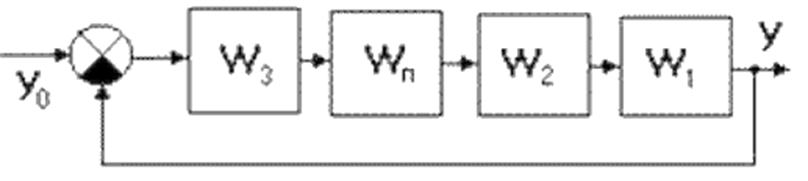
161. На схемі представлено з’єднання динамічних ланок, яке називається:

+послідовне
паралельне
зустрічно-паралельне
змішане
162. Для зображеного на схемі послідовного з’єднання динамічних ланок загальна передатна функція може бути знайдена за формулою:
W(p)=W1(p)+W2(p)+…+Wn(p)
+ W(p)=W1(p)∙W2(p)∙…∙Wn(p)
W(p)=−W1(p)−W2(p)−…−Wn(p)
W(p)=W1(p)−W2(p)+…+Wn(p)
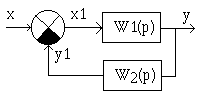
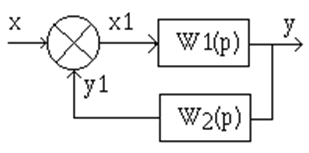
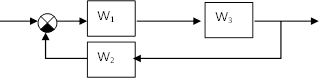
163. На схемі представлено з’єднання динамічних ланок
послідовне
паралельне
+зустрічно-паралельне
змішане
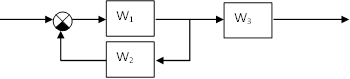
164. Для зображеного на схемі з’єднання динамічних ланок загальна передатна функція може бути знайдена по формулі
W(p)=W1(p)+W2(p)
W(p)=W1(p)∙W2(p)
W(p)=W1(p)/(1-W1(p)W2(p))
+ W(p)=W1(p)/(1+W1(p)W2(p))
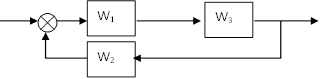
165. Для зображеного на схемі з’єднання динамічних ланок загальна передатна функція може бути знайдена за формулою:
W(p)=W1(p)+W2(p)
W(p)=W1(p)∙W2(p)
+ W(p)=W1(p)/(1-W1(p)W2(p))
W(p)=W1(p)/(1+W1(p)W2(p))
166. Знайдіть відповідність між зображеними схемами з’єднання динамічних ланок та їх назвами:
паралельне
послідовне
зустрічно-паралельне
|
|
|
167. Під час переносу вузла через лінійну ланку А за ходом сигналу необхідно включити у відгалуження …
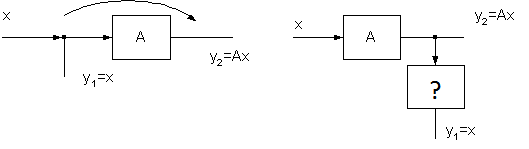
таку саму лінійну ланку А
протилежну лінійну ланку –А
одиничну ланку B=1
+ зворотну лінійну ланку А-1
168. Під час переносу вузла через лінійну ланку А проти ходу сигналу необхідно ввімкнути у відгалуження …
+ таку саму лінійну ланкуА
протилежну лінійну ланку –А
одиничну ланку B=1
зворотну лінійну ланку А-1
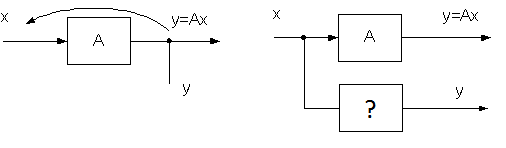
169. Під час переносу суматора через лінійну ланку А за ходом сигналу необхідно ввімкнути у відгалуження:
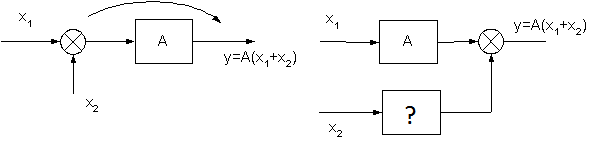
+ таку саму лінійну ланку А
протилежну лінійну ланку –А
ще один суматор
зворотну лінійну ланку А-1
170. Під час переносу суматора через лінійну ланку Апроти ходу сигналу необхідно ввімкнути у відгалуження:
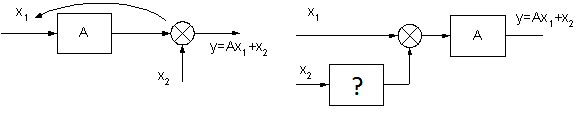
таку саму лінійну ланку А
протилежну лінійну ланку –А
ще один суматор
+ зворотну лінійну ланку А-1
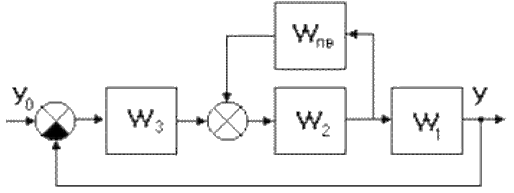
171. Для зображеного на схемі з’єднання динамічних ланок загальна передатна функція може бути знайдена за формулою:
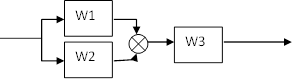
W(p)=W1(p)∙W2(p)+W3(p)
W(p)=W3(p)/(1+W1(p)W2(p))
W(p)=W3(p)(1+W1(p)W2(p))
+ W(p)=(W1(p)+W2(p))∙W3(p)
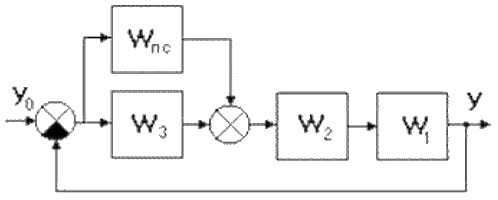
172. Для зображеного на схемі з’єднання динамічних ланок загальна передатна функція може бути знайдена за формулою:
|
|
|
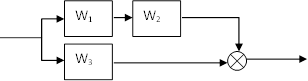
+ W(p)=W1(p)∙W2(p)+W3(p)
W(p)=W3(p)/(1+W1(p)W2(p))
W(p)=W3(p)(1+W1(p)W2(p))
W(p)=(W1(p)+W2(p))∙W3(p)
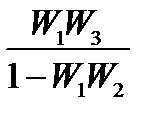
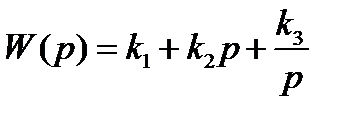
173. Для зображеного на схемі з’єднання динамічних ланок загальна передатна функція може бути знайдена за формулою:
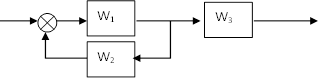
+ 
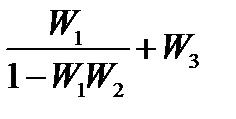
174. Для зображеного на схемі з’єднання динамічних ланок загальна передатна функція може бути знайдена за формулою:
+
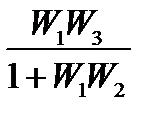
175. Для зображеного на схемі з’єднання динамічних ланок загальна передатна функція може бути знайдена за формулою:

+ 
176. Для зображеного на схемі з’єднання динамічних ланок загальна передатна функція може бути знайдена за формулою:
+ 
177. Для зображеного на схемі з’єднання динамічних ланок загальна передатна функція може бути знайдена за формулою:
+
178. Зворотний зв’язок, який діє тільки в перехідних режимах називають
місцевий
жорсткий
+гнучкий
додатний
179. Якщо сигнал зворотного зв’язку існує як в усталеному, так і в перехідному режимах, то такий зворотний зв’язок називають
місцевий
+ жорсткий
гнучкий
додатний
180. Для замкненої системи, яку зображено на рисунку передатна функція за сигналом керування  дорівнює
дорівнює

+ 

181. Для замкненої системи, яку зображено на рисунку передатна функція за помилкою  ,дорівнює:
,дорівнює:
+ 
182. Для передатних функцій замкненої системи по керуванню Ф(p) та по помилці Фε(p) справедливе таке відношення
+ 
183. Якщо передатна функція розімкненої системи W, тоді характеристичне рівняння замкненої системи може бути записане:
+ 

184. Здатність системи повертатися до стану рівноваги після зняття збурення, що порушило цю рівновагу називається
+ стійкістю
непохитністю
жорсткістю
врівноваженістю
185. Система, яка беззупинно віддаляється від рівноважного стану або робить довколо нього коливання зі зростаючою амплітудою є …
неврівноваженою
+ нестійкою
гнучкою
віддаленою
186. Математичну теорію стійкості було розроблено вченим на прізвище:
Попов
+ Ляпунов
Максвел
Стодола
187. Характеристичним поліномом розімкненої системи є …
+ знаменник передатної функції розімкненої системи
чисельник передатної функції розімкненої системи
сума чисельника і знаменника передатної функції розімкненої системи
різниця чисельника і знаменника передатної функції розімкненої системи
188. Характеристичним поліномом замкненої системи є …
знаменник передатної функції розімкненої системи
чисельник передатної функції розімкненої системи
+ сума чисельника і знаменника передатної функції розімкненої системи
різниця чисельника і знаменника передатної функції розімкненої системи
189. Згідно з теорією стійкості, лінійна система буде стійкою, якщо корені її характеристичного рівняння …
+ лежать у лівій комплексній напівплощині
лежать у правій комплексній напівплощині
мають додатні дійсні частини
+мають від’ємні дійсні частини
190. Яка з перерахованих систем є стійкою, якщо характеристичні рівняння систем мають такі корені:
+ (-2; -0,5±j3; -0,01)
(-1; 0,7±j5; -0,09)
(3; ±j2; -0,5)
(-2; ±j3; -0,01)
191. Яка з перерахованих систем є нестійкою, якщо характеристичні рівняння систем мають такі корені
(-2; -0,5±j3; -0,01)
(-1; -0,7±j5; -0,09)
(-18; -100±j2; -0,5)
+ (-2; -20±j3; 0,01)
192. Для того, щоб система була стійкою необхідно, щоб всі коефіцієнти її характеристичного рівняння були …
за модулем більше одиниці
розташовані в лівой комплексній напівплощині
+ ненульові і одного знаку
кратними порядку системи
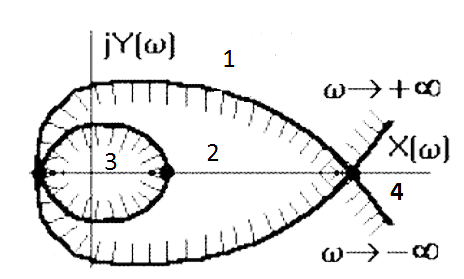
193. Межі стійкості на комплексній площині відповідають промені:
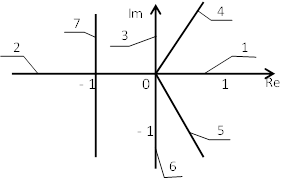
1, 2
2, 7
+ 3, 6
4, 5
194. Система, що має таке розташування коренів характеристичного рівняння:
+ стійка
нестійка
на межі стійкості
фізично не реалізована
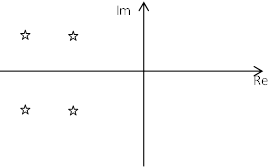
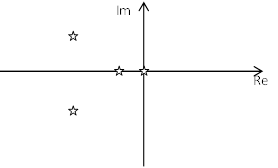
195. Система, що має таке розташування коренів характеристичного рівняння:
стійка
+ нестійка
на межі стійкості
фізично не реалізована
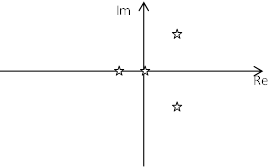
196. Система, що має таке розташування коренів характеристичного рівняння:
стійка
нестійка
+ на межі стійкості
фізично не реалізована
197. Виберіть з наведених критеріїв стійкості частотні:
+ Найквіста
Рауса
Гурвіца
+ Михайлова
198. Виберіть з наведених критеріїв стійкості алгебраїчні:
Найквіста
+ Рауса
+ Гурвіца
Михайлова
199. Знання якого з розділів математики знадобиться під час розрахунку критерія стійкості Гурвіца:
дференціальне числення
інтегральне числення
+ матрична алгебра
математичний аналіз
200. Згідно з критерієм стійкості Гурвіца всі діагональні мінори визначника Гурвіца повинні бути …
однакові
+ більше нуля
менше нуля
рівними нулю
201. Для системи третього порядку  згідно з критерієм стійкості Гурвіца достатня умова стійкості формулюється так …
згідно з критерієм стійкості Гурвіца достатня умова стійкості формулюється так …
+ 
202. Серед наведених характеристичних рівнянь виберіть ті, які відповідають необхідній умові стійкості:
+ 


+ 
203. Збільшення аргументу функції, згідно принципу аргументу залежить від таких параметрів
кількість змінних
+ порядок полінома
+ кількість лівих коренів
+ кількість правих коренів
знак функції
порядок розташування коренів
204. Годограф Михайлова стійкої системи четвертого порядку завершується при 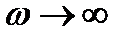 в такій чверті комплексної площини
в такій чверті комплексної площини
першій
другій
третій
+ четвертій
205. Годограф Михайлова стійкої системи третього порядку завершується за у такій чверті комплексної площини:
першій
другій
+ третій
четвертій
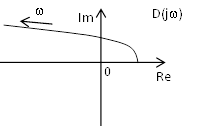
206. Годограф Михайлова D(jω) для системи третього порядку зображено на рисунку. Така система …
+ стійка
нестійка
на межі стійкості
неможливо визначити
207. Годограф Михайлова D(jω) для системи третього порядку зображено на рисунку. Така система …
стійка
+ нестійка
на межі стійкості
неможливо визначити
208. Годограф Михайлова D(jω) для системи третього порядку зображено на рисунку. Така система
стійка
нестійка
+ на межі стійкості
неможливо визначити
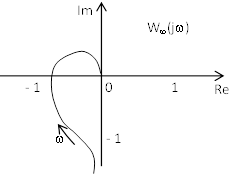
209. Годограф Михайлова D(jω) для системи другого порядку зображено на рисунку. Така система
+ стійка
нестійка
на межі стійкості
неможливо визначити
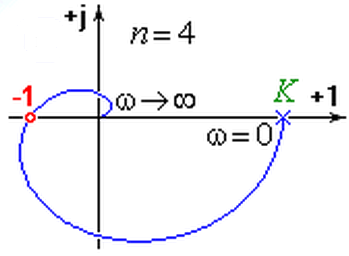
210. Годограф Михайлова D(jω) для системи четвертого порядку зображено на рисунку. Така система
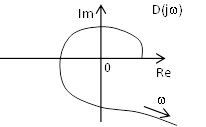
+ стійка
нестійка
на межі стійкості
неможливо визначити
211. Годограф Михайлова D(jω) для системи другого порядку зображено на рисунку. Така система
стійка
+ нестійка
на межі стійкості
неможливо визначити
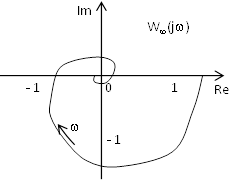
212. Годограф Михайлова D(jω) для системи другого порядку зображено на рисунку. Така система

стійка
+ нестійка
на межі стійкості
неможливо визначити
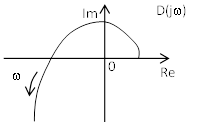
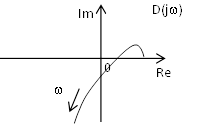
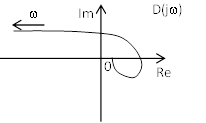
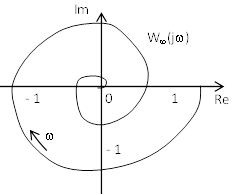
213. Годограф Михайлова D(jω) для системи третього порядку зображено на рисунку. Така система
стійка
+ нестійка
на межі стійкості
неможливо визначити
214. Годограф Михайлова D(jω) для системи четвертого порядку зображено на рисунку. Така система
стійка
+ нестійка
на межі стійкості
неможливо визначити
215. Стійка система третього порядку має такий годограф Михайлова D(jω)
1.
2. +
3.
4.
216. Стійка система четвертого порядку має такий годограф Михайлова D(jω)
1.
2.
3.+
4.
217. Критерій стійкості Найквіста дозволяє визначити стійкість …
замкненої системи за її АФЧХ
+ замкненої системи за АФЧХ розімкненої
розімкненої системи за АФЧХ замкненої
розімкненої системи за її АФЧХ
218. Які координати має критична для стійкості точка на комплексній площині, яку не повинна охоплювати АФЧХ розімкненої системи згідно з критерієм Найквіста:
(0; j1)
(0; -j1)
+ (-1; j0)
(1; j0)
219. АФЧХ стійкої розімкненої системи зображено на рисунку. Чи буде система стійкою в замкненому стані?
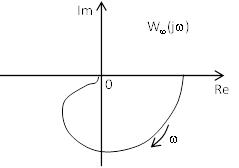
+ Система буде стійкою після замикання
Система буде нестійкою після замикання
Система після замикання опиниться на межі стійкості
Неможливо визначити стійкість системи після замикання
220. АФЧХ розімкненої системи зображено на рисунку. Чи буде система стійкою в замкненому стані?
+ Система буде стійкою після замикання
Система буде нестійкою після замикання
Система після замикання опиниться на межі стійкості
Неможливо визначити стійкість системи після замикання
221. АФЧХ стійкої розімкненої системи зображено на рисунку. Чи буде система стійкою в замкненому стані?
+ Система буде стійкою після замикання
Система буде нестійкою після замикання
Система після замикання опиниться на межі стійкості
Неможливо визначити стійкість системи після замикання
222. АФЧХ стійкої розімкненої системи зображено на рисунку. Чи буде система стійкою в замкненому стані?
Система буде стійкою після замикання
+ Система буде нестійкою після замикання
Система після замикання опиниться на межі стійкості
Неможливо визначити стійкість системи після замикання
223. АФЧХ стійкої розімкненої системи зображено на рисунку. Чи буде система стійкою в замкненому стані?
Система буде стійкою після замикання
Система буде нестійкою після замикання
+ Система після замикання опиниться на межі стійкості
Неможливо визначити стійкість системи після замикання
224. З представлених АФЧХ стійких розімкнених систем виберіть ті, які будуть нестійкими в замкненому стані:
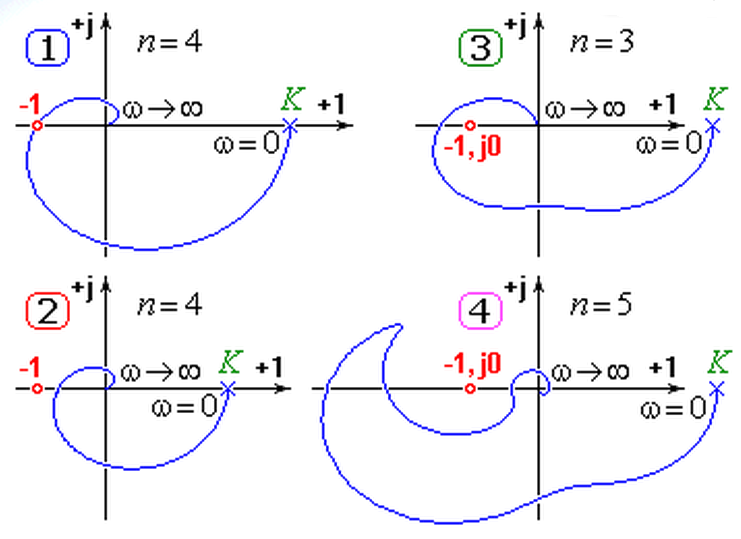
Система №1
Система №2
+ Система №3
Система №4
225. Логарифмічнй крітерій стійкості дозволяє визначити стійкість:
замкненої системи за її ЛАЧХ та ЛФЧХ
+ замкненої системи за ЛАЧХ та ЛФЧХрозімкненої
розімкненої системи за ЛАЧХ та ЛФЧХ замкненоїї
розімкненої системи за її ЛАЧХ та ЛФЧХ
226. На рисунку позначено:
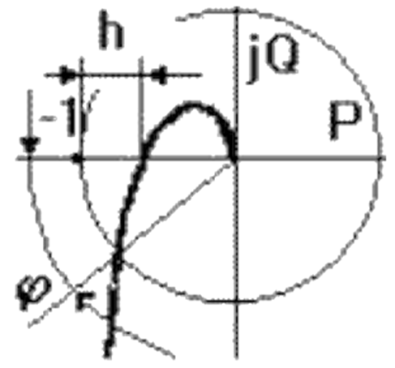
h – запас стійкості за фазою,  – запас стійкості за амплітудою;
– запас стійкості за амплітудою;
h – висота амплітуди,  – запізнювання за фазою;
– запізнювання за фазою;
h – амплітудна відстань, 6. – фазовий зсув;
+ h – запас стійкості за амплітудіою, – запас стійкості за фазою.
227. Згідно з критерієм Найквиста, чим далі графік АФЧХ від точки
(-1, j0), тим запас стійкості:
менше
слабше
+ більше
потужніше
228. Згідно з критерієм Найквиста, чим ближче проходить графік АФЧХ від точки (-1, j0), тим запас стійкості:
+ менше
слабше
більше
потужніше
229. Запас стійкості за модулем визначається відстанню від критичної точки до точки перетинання годографом:
одиничного кола
+ осі абсцис
осі ординат
проміня під кутом
230. Запас стійкості за фазою визначається кутом між ______________ і променем, проведеним з початку координат у точку перетину годографа з одиничним колом:
+ від’ємним напрямом дійснної осі
додатнім напрямом дійснної осі
від’ємним напрямом уявної осі
додатнім напрямом уявної осі
231. Для забезпечення вказаних запасів стійкості hта для системи, її АФЧХ у розімкненому стані повинна …
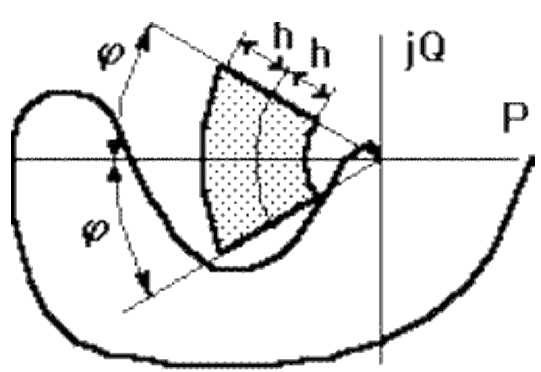
торкатися заштрихованої області
пересікати заштриховану область
ділити заштриховану область навпіл
+ не пересікати заштриховану область
232. Як впливає присутність ланки чистого запізнення в системі на її стійкість?
не впливає
покращує стійкість
+ погіршує стійкість
233. Як впливає присутність ланки чистого запізнення в системі на її АЧХ?
збільшує амплітуду
зменшує амплітуду
+ не впливає
234. Як впливає присутність ланки чистого запізнення в системі на її запас за фазою?
збільшує запас за фазою
+ зменшує запас за фазою
не впливає
235. Як впливає підвищення коефіцієнта підсилення системи на її запаси стійкості?
збільшує
+ зменшує
не впливає
236. Як впливає підвищення порядку астатизму системи на її запаси стійкості?
збільшує
+ зменшує
не впливає
237. D-розбиття використовується для …
+ побудови областей стійкості системи
підвищення точності системи на низьких частотах
розрахунку показників якості системи
+дослідження впливу параметрів на стійкість системи
+контролю допустимого діапазону зміни параметрів
підвищення швидкодії системи
238. Укажіть номер області-претендента для D-розбиття за одним параметром:
1.
2.
+3.
4.
239. Усталене значення вихідного сигналу для системи  дорівнюватиме:
дорівнюватиме:
5
+ 2,5
0,4
1
240. Усталене значення вихідного сигналу для системи  дорівнюватиме:
дорівнюватиме:
+ 5
2,5
0,4
1
241. Усталене значення вихідного сигналу для системи  дорівнюватиме
дорівнюватиме
+ 3
12
0,6
0,3
242. Яких методів побудови перехідних процесів САР не існує?
Метод трапецій і трикутників
Рішення діференціальних рівнянь стану системи
Метод зворотного перетворення Лапласа
+ Метод мінімальних квадратів
243. В якому методі для побудови перехідних процесів САР використовується дійсна частотна характеристика?
+ Метод трапецій і трикутників
Рішення диференціальних рівнянь стану системи
Метод зворотного перетворення Лапласа
Метод мінімальних квадратів
244. Яких показників якості систем автоматичного керування не існує?
Кореневих
+ Амплітудних
Інтегральних
Частотних
245. На рисунку поз. 3 позначено:
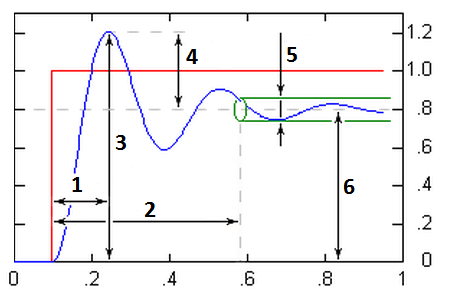
+ ymax
tmax
σmax
ууст
246. На рисунку поз. 4 позначено:
ymax
tmax
+ σmax
ууст
247. На рисунку поз. 6 позначено:
ymax
tmax
σmax
+ ууст
248. На рисунку поз. 2 позначено:
+ час регулювання
перерегулювання
5% трубка
усталене значення виходу
249. На рисунку поз. 5 позначено:
час регулювання
перерегулювання
+ 5% трубка
усталене значення виходу
250. На рисунку перерегулювання позначено номером позиції:
+4
3
5
1
251. На рисунку час регулювання позначено номером позиції:
1
+2
5
6
252. На рисунку усталене значення вихідного сигналу позначено номером позиції:
1
2
5
+6
253. Перерегулювання може бути обчислене за графіком за формулою:
+ 

254. Перерегулювання σ відносять до показників якості:
+ прямих
кореневих
частотних
інтегральних
255. Час регулювання відносять до показників якості:
+ прямих
кореневих
частотних
інтегральних
256. Статичну похибку εст = х - ууст відносять до показників якості:
+ прямих
кореневих
частотних
інтегральних
257. Показник  відносять до ___________ показників якості:
відносять до ___________ показників якості:
прямих
кореневих
частотних
+ інтегральних
258. Якою літерою на рисунку позначено кореневий показник якості – степінь стійкості?
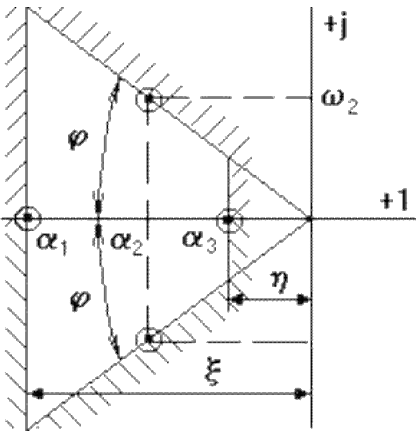
+ η
ξ
α3
259. Максимальне припустиме відхилення Δ для визначення часу регулювання визначається за формулою:
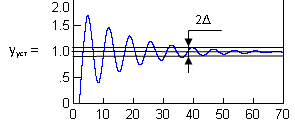
+ Δ=0,05yуст
Δ=0,05ymax
Δ=0,95
Δ=0,05ymin
260. За якою з точок за графіком АЧХ визначається показник якості – полоса пропускання?

1.
2.
+3.
4.
261. За якою з точок за графіком АЧХ визначається показник коливальності системи?
1.
+2.
3.
4.
262. Коефіцієнти похибок використовуються для оцінювання __________ системи.
стійкості
надійності
+ точності
коливальності
263. Знайдіть відповідність законів регулювання та їх передатних функцій.
 П
П
 ПІ
ПІ
 ПД
ПД
 ПІД
ПІД
264. При використанні пропорційного закону регулювання підвищення коефіцієнту призводить до …
+ підвищення точності системи
підвищення швидкодії системи
покращення перехідного процесу
підвищення запасу стійкості
265. Використання інтегрального закону регулювання призводить до …
+ підвищення точності системи
підвищення швидкодії системи
покращення перехідного процесу
підвищення запасу стійкості
266. Використання диференціального закону регулювання призводить до …
підвищення точності системи
+ підвищення швидкодії системи
покращення перехідного процесу
зменшення запасу стійкості
267. Укажіть відповідність схем вмикання коректуючих ланок WП в систему та їх назв.
 послідовне
послідовне
 паралельне
паралельне
 зворотній зв’язок
зворотній зв’язок
268. Ймовірність випадкової події може змінюватись в межах:

+ 
269. Як пов’язані між собою ймовірності протилежних подій p та q?
p=q
p=-q
p=1/q
+ p=1-q
270. В теорії ймовірності середнє значення випадкової величини називають:
дисперсією
+ математичним сподіванням
кореляцією
центральним моментом
271. Середній квадрат відхилення випадкової величини від її середнього значення називається …
+ дисперсія
математичне сподівання
кореляція
центральний момент
272. Випадковим процесом називається така випадкова величина, яка …
не змінюється з часом t
+ змінюється з часом t
не залежить від стану системи
залежить від зовнішніх сигналів
273. На якому з малюнків зображено безперервний випадковий процес?
|
| 
| |
| 1+. | 2. | |
|
| |
| 3. | 4. | |

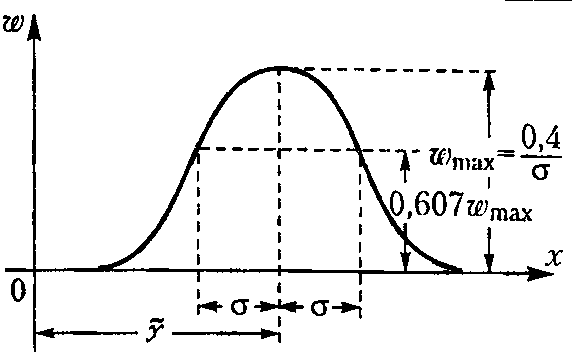
274. "Білим шумом" називається випадковий процес, який має ______ спектральної щільності в діапазоні частот від  до
до  .
.
+ однакове значення
нульове значення
куполоподібний розподіл
лінійний розподіл
Дата добавления: 2018-08-06; просмотров: 2261; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!