Основные принципы работы замкнутого электропривода.
Рассмотрим работу системы автоматического управления на примере схемы, приведенной на рис.8.3.
В качестве технологического процесса возьмем процесс определения и установку положения руки робота и установку ее в заданную точку пространства ( в частности по одной из трех осей, например, оси Х)
Объектом управления является рука робота, исполнительным механизмом – электродвигатель перемещения руки робота по оси Х., регулятором - устройство подачи напряжения на двигатель руки. Остальные элементы входят в автоматическую систему управления роботом.
Система работает следующим образом:
Допустим рука робота находится в точке на оси ОХ с координатой Х1. Однако, согласно программы работы робота его рука должна быть в точке на оси ОХ с координатой Х2. Причем Х2 больше Х1. Координата Х2 заложена в схеме сравнения. Датчик - преобразователь выдает электрический сигнал пропорциональный координате Х1, который подается на схему сравнения. Одновременно по другому каналу на схему сравнения подается электрический сигнал соответствующий заданной координате Х2 положения руки робота. В схеме сравнения производится анализ двух поступающих сигналов и вырабатывается "сигнал ошибки " или, иначе, сигнал рассогласования.
В рассматриваемом случае сигнал с датчика будет меньше сигнала "НОРМА". т.е.
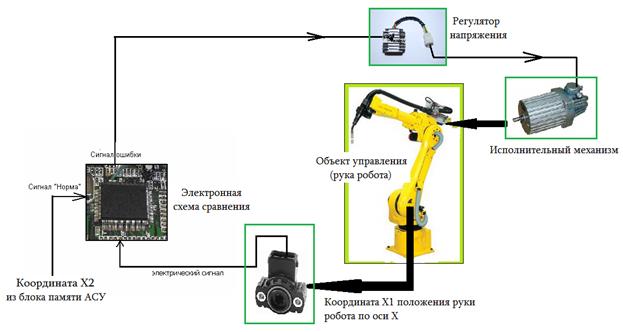
Рис. 8.3. Замкнутая схема управления электроприводом положения.
|
|
|
Uнорма - Uдатчик = ∆. Сигнал ошибки имеет положительный знак. Он подается на регулятор напряжения. Регулятор подает напряжение на исполнительный механизм (двигатель). Двигатель начинает перемещать руку робота. Причем, направление перемещения зависит от знака ошибки, а скорость перемещения – от величины ошибки. По мере приближения к заданной точке на оси координат величина ошибки уменьшается, скорость движения руки уменьшается. При Uнорма - Uдатчик = 0 (сигнал ошибки равен нулю) рука робота останавливается в заданной точке на оси Х. Так как регулирование ведется одновременно по трем осям (Х,Y,Z), то рука робота остановится в строго заданной программой точке пространства.
Иногда такие системы называют следящими. Если на вход схемы сравнения подавать по каналу "НОРМА" программно изменяющийся сигнал, то система будет отрабатывать заданную программу изменения параметра.
Если в руку робота поместить сварочную головку сварочного автомата, то робот по программе сделает сварочный шов необходимой конфигурации и длины.
Занятие 9 (2 часа) Контрольная работа №2
Тема 4 Электроприводы с двигателями постоянного тока
Занятие 10 (2 часа) Регулирование скорости двигателя постоянного тока с помощью резисторов в цепи якоря
|
|
|
Общая характеристика электроприводов с двигателями постоянного тока.
В электроприводах используются двигатели постоянного тока:
- независимого возбуждения (ДПТНВ),
- последовательного возбуждения (ДПТПВ)
- смешанного возбуждения (ДПТСВ) ,
- а также двигатели с возбуждением от постоянных магнитов, которые по своим характеристикам близки к ДПТНВ.
Электротехническая промышленность выпускает двигатели постоянного тока основной общепромышленной серии 2П в диапазоне мощностей от 0,13 до 200 кВт различного конструктивного исполнения и с разными способами вентиляции, предназначенные в первую очередь для работы в регулируемых ЭП.
Усовершенствование двигателей постоянного тока привело к разработке новой серии 4П, рассчитанной на напряжения 110 и 220 В, со скоростями вращения от 750 до 3000 об/мин и номинальными моментами от 2 до 15 000 Н- м с улучшенными удельными энергетическими показателями, динамическими и виброакустическими свойствами. Кроме того, трудоемкость их изготовления по сравнению с серией 2П снижена в 2,5...3 раза при уменьшении расхода меди на 25...30%.
|
|
|
Для ЭП ряда рабочих машин и механизмов выпускаются специализированные серии ДПТНВ. Для ЭП металлорежущих станков помимо серий 2П и 4П применяются двигатели серий ПБСТ и ПГТ (с гладким якорем), а также высокомоментные двигатели серий ПБВ, ДК1 и ДК2 с возбуждением от постоянных магнитов.
Для крановых механизмов выпускаются двигатели серии Д с независимым и последовательным возбуждением, исполнение которых максимально учитывает условия их работы и предъявляемые к ним требования. Для краново-металлургических ЭП применяются также двигатели с независимым, последовательным и смешанным возбуждением серий ДП.
Специализированные серии ДПТ выпускаются и для металлургического производства (например, прокатные двигатели серий НП и ПП), текстильной промышленности и ряда других отраслей народного хозяйства.
Дата добавления: 2018-05-12; просмотров: 420; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!