Исследование безинерционного звена
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Сыктывкарский лесной институт (филиал) федерального государственного
Бюджетного образовательного учреждения высшего
Образования «Санкт - Петербургский государственный
Лесотехнический университет имени С.М. Кирова»
(СЛИ)
Транспортно-технологический факультет
Кафедра «Физика и автоматизация технологических процессов и
производств»
КУРСОВАЯ РАБОТА ПО ДИСЦИПЛИНЕ «ТАУ»
Тема проекта «Динамические звенья. Устойчивость, качество и параметрический синтез линейных систем автоматического управления.»
Выполнил: Старцев Евгений Витальевич
Студент ФиАТПиП, 4 курса
Форма обучения: заочная
Направление бакалавриата «АТПиП»
Руководитель: Семеновых В. И., к. т. н., доц.
Оценка: _________ Подпись __________
Дата:______________
Содержание
Введение. 4
1 Динамические звенья. 5
1.1 Усилительное звено. 5
1.1.1 Временные характеристики. 6
|
|
|
1.1.2 Частотные характеристики. 7
1.2 Апериодическое звено. 7
1.2.1 Временные характеристики. 8
1.2.2 Частотные характеристики. 9
1.3 Колебательное звено. 11
1.3.1 Временные характеристики. 11
1.3.2 Частотные характеристики. 12
1.4 Результаты моделирования. 13
1.4.1 Исследование безинерционного звена. 13
1.4.2 Исследование апериодического звена. 18
1.4.3 Исследование колебательного звена. 22
2 Создание моделей. Критерии устойчивости систем автоматического управления 27
2.1 Понятие устойчивости в большом и малом. 27
2.3 Частотные критерии устойчивости. 30
2.3.1 Критерии устойчивости Найквиста. 31
2.3.2 Запасы устойчивости. 32
2.4 Результаты моделирования. 34
3 Качество линейных систем автоматического управления. 38
3.1 Основные параметры качества систем управления. 38
3.2 Прямые показатели качества. 40
3.3 Косвенные показатели качества. 43
3.4 Результаты моделирования. 45
4 Параметрический синтез систем. 49
4.1 Теория. 49
4.2 Результаты моделирования. 51
Заключение. 57
Библиографический список. 58
Введение
Динамические звенья
Под динамическим звеном понимается устройство любого физического вида и конструктивного оформления, но имеющее определенное математическое описание.
|
|
|
Характеристика звена – это его реакция на определенное входное воздействие.
Для линейных звеньев и линейных систем в целом характеристика полностью определяет их динамические свойства, так как к линейным звеньям и системам применим принцип суперпозиции, позволяющий по реакции линейного элемента на какое-либо известное воздействие найти его реакцию на воздействие произвольного вида.
В качестве входных воздействий, на которые ищется реакция звена, приняты воздействия, описываемые элементарными математическими функциями, то есть такими, на которые можно разложить любые произвольные функции. В теории управления в качестве элементарных функций используются:
1) единичная импульсная или дельта-функция d(t);
2) единичная ступенчатая функция 1(t);
3) гармоническая функция X0sin(wt).
Существуют временные (импульсная и переходная функции) и частотные характеристики.
Усилительное звено
Усилительным называют звено, которое описывается уравнением:

| (1.1) |
где k – коэффициент усиления звена.
Передаточная функция – это один из способов математического описания динамической системы. Используется в основном в теории управления, связи и цифровой обработке сигналов:
|
|
|

| (1.2) |
Временные характеристики
Переходная функция – это называется реакция системы (звена) на единичное ступенчатое воздействие при нулевых начальных условиях.
Переходная функция (1.3) усилительного звена в соответствии с рисунком 1а и его функция (1.4) веса согласно рисунка 1б соответственно имеют вид:

| (1.3) |

| (1.4) |
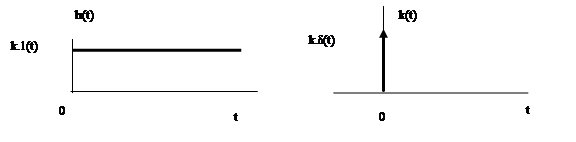
|
а) переходная функция б) функция веса
Рисунок 1 – Временные функции
Пропорциональное звено – статическое, уравнение не содержит производных.
Передаточная функция не зависит от переменной p, т.е. пропорциональное звено является статическим. Параметр K называют коэффициентом передачи звена.
Частотные характеристики
Логарифмическая амплитудно-частотная характеристика (ЛАЧХ):
| L(ω)=20•lg(K) | (1.5) |
Логарифмическая амплитудно-частотная характеристика не зависит от частоты. При любой частоте гармонического воздействия звено изменяет амплитуду в К раз, т.е. на 20•lg(K) децибел.
Логарифмические фазово-частотные характеристики (ЛФЧХ): φ(ω)=0.
Логарифмические фазово-частотные характеристики: не зависит от частоты. Звено не вносит фазовый сдвиг при любой частоте гармонического воздействия.
|
|
|

а – ЛАЧХ; б – ЛФЧХ.
Рисунок 2 – Частотные характеристики
Апериодическое звено
Одно из самых часто встречающихся звеньев – апериодическое, которое описывается дифференциальным уравнением:
| (1.6) |
и имеет передаточную функцию:
 , ,
| (1.7) |
где k – безразмерный коэффициент, а T > 0 – постоянная, которая называется постоянной временизвена. Постоянная времени – размерная величина, она измеряется в секундах и характеризует инерционностьобъекта, то есть скорость его реакции на изменение входного сигнала.
Временные характеристики
Переходная функция:

| (1.8) |
Зависимость h(t) – экспоненциальная:

Рисунок 3 – Переходная функция
При скачке воздействия выходная величина не может измениться скачком, а изменяется плавно по экспоненте, т.е. звено обладает инерцией. Отсюда происходит название звена – инерционное. Переходная функция возрастает монотонно, без колебаний. Отсюда происходит название звена – апериодическое (т.е. не имеющее периода, не колебательное).
Установившееся значение переходной функции равно коэффициенту К. Теоретически переходная функция будет бесконечно приближаться к значению K. На практике обычно считают, что переходный процесс закончился за время 3Т, когда переходная функция достигает значения 0,95К. Постоянная времени Т – это показатель инерционности звена. Чем больше Т, тем медленнее возрастает переходная функция и тем более инерционным является звено.
Весовая функция.
Найдем ее как производную переходной функции:
| (1.9) |
Начальное значение весовой функции: g(0)=K/T.
Установившееся значение весовой функции: g(∞)=0.

Рисунок 4 – Весовая функция
Частотные характеристики
Получим аналитические выражения для АЧХ и ФЧХ.
Частотная передаточная функция апериодического звена (после подстановки в передаточную функцию p=j*ω):

| (1.10) |
где W(jω) – частотная передаточная функция,  – постоянная времени.
– постоянная времени.
Таким образом, вещественная частотная характеристика:
| (1.11) |
Мнимая частотная характеристика:

| (1.12) |
Амплитудная частотная характеристика:

| (1.13) |
Фазовая частотная характеристика:

| (1.14) |
АФЧХ
Годограф Найквиста для апериодического звена имеет вид полуокружности:

Рисунок 5 – Годограф Найквиста
ЛАЧХ и ЛФЧХ для апериодического звена:
. 
Рисунок 6 - Пример ЛАЧХ и ЛФЧХ апериодического звена для К>1
Асимптотическая ЛАЧХ апериодического звена состоит из двух прямых. Первая прямая проходит в диапазоне частот 0…1/T с наклоном 0 дБ/дек на расстоянии 20lg(K) относительно оси частоты. При К=1 20lg(K)=0, т.е. первая прямая будет совпадать с осью частоты, при К>1 она расположена выше оси частоты, при К<1 – ниже оси частоты. Вторая прямая проходит в диапазоне частот 1/Т…∞ с наклоном –20 дБ/дек (минус двадцать). Частота, на которой соединяются прямые с разными наклонами ω=1/Т, называется частотой сопряжения. На этой частоте будет наибольшее отличие точного графика ЛАЧХ от асимптотического (оно составляет около 3дБ).
Значения ЛФЧХ лежат в пределах 0…–π/2 рад (0…–90º). На частоте сопряжения φ(Т/2)= –π/4 рад (–45º). В области низких частот ω<<1/Т апериодическое звено близко по своим свойствам к пропорциональному звену W(p)=K, в области высоких частот ω>>1/Т апериодическое звено близко по своим свойствам к интегрирующему звену W(p)=K/(Тр).
Колебательное звено
Описывается дифференциальным уравнением
 , ,
| (1.15) |
при Т1<2T2 корни характеристического уравнения комплексные и его переписывают в виде:
| (T2p2+2xTp+1) y(t) = x(t), | (1.16) |
где Т - постоянная времени, определяющая угловую частоту свободных колебаний l=1/Т; x - параметр затухания, лежащий в пределах 0<x<1.
Временные характеристики
Временные характеристики представляют собой затухающие периодические процессы.
Общепринятая запись передаточной функции колебательного звена имеет вид:
| (1.17) |
а) ξ =1 б) ξ=2
Рисунок 7 – Передаточная функция
Постоянная времени определяет инерционность объекта, чем она больше, тем медленнее изменяется выход при изменении входа. Чем больше ξ, тем быстрее затухают колебания.
Частотные характеристики
Амплитудно-фазовая частотная характеристика звена:

| (1.18) |

| (1.19) |
| (1.20) |
Рисунок 8 – Примеры частотных характеристик
Примерами колебательного звена могут служить электрический колебательный контур, электродвигатель постоянного тока, маятник и др.
Результаты моделирования
Исследование безинерционного звена
Запуск пакета Simulink.
1. Запустим при помощи ярлыка на рабочем столе Windows программу MatLab.
2. На панели инструментов щелкнем по кнопке Simulink  , при этом откроется окно браузера библиотек Simulink Library Browser. В окне браузера содержится список разделов библиотеки Simulink, который представлен в виде дерева. Правила работы со списком являются общими для списков такого вида. Для просмотра содержимого конкретного раздела библиотеки, как правило, достаточно выделить его мышью, тогда в правой части окна Simulink Library Browser появится набор пиктограмм компонентов активного раздела библиотеки.
, при этом откроется окно браузера библиотек Simulink Library Browser. В окне браузера содержится список разделов библиотеки Simulink, который представлен в виде дерева. Правила работы со списком являются общими для списков такого вида. Для просмотра содержимого конкретного раздела библиотеки, как правило, достаточно выделить его мышью, тогда в правой части окна Simulink Library Browser появится набор пиктограмм компонентов активного раздела библиотеки.
3. В окне браузера выделим основной раздел Simulink. В правой части окна Simulink Library Browser появится набор пиктограмм компонентов раздела, а в левой – список раздела библиотеки в виде дерева. Решение рассмотренных ниже задач базируется на применении следующих основных разделов модуля Simulink:
· Continuous (Непрерывные звенья)
· Discrete (Дискретные звенья)
· Math Operations (блоки выполнения математических операций)
· Ports & Subsystems (блоки подсистем)
· Sinks (Приемники)
· Sources (Источники сигналов).
Модель исследуемой системы создается в окне S - модели пакета Simulink.
4. На панели инструментов щелкнем по кнопке создания новой модели  , откроется пустое окно файла untitled (S –модели), в котором будет храниться модель исследуемой системы, создаваемая путем графической сборки схемы соединений блоков, хранящихся в библиотеке модулей (блоков) Simulink.
, откроется пустое окно файла untitled (S –модели), в котором будет храниться модель исследуемой системы, создаваемая путем графической сборки схемы соединений блоков, хранящихся в библиотеке модулей (блоков) Simulink.
5. В левой части окна браузера Simulink Library Browser щелкнем по компонентуSources(Источники)библиотекиsimulink. В правой части окна браузера появятся пиктограммы источников сигналов. Отбуксируем блок Step в окно файла untitled. Блок Stepобеспечивает формирование скачкообразного постоянного сигнала.
6. В левой части окна браузера Simulink Library Browser щелкнем по компонентуMath Operations библиотекиsimulink. Отбуксируем из правой части окна браузера блок Gain в окно файла untitled.
7. В левой части окна браузера Simulink Library Browser щелкнем по компонентуSinks(Приемники) библиотекиsimulink. Из правой части окна браузера дважды отбуксируем блок Scope(Индикатор) в окно файла untitled. Свернем все окна, кроме окна файла untitled.
8. Поочередно выделим блоки в окне файла untitled и установите их
9. Соединим три блока, находящиеся на одном уровне для этого:
· Установим указатель мыши на выходе первого блока (при этом курсор должен принять форму перекрестия).
· Нажмем левую кнопку мыши и, удерживая ее в этом положении, передвинем указатель ко входу второго блока. Отпустим кнопку мыши. Программа заменит указатели входов и выходов блоков соединительной линией с указанием направления передачи сигнала.
Аналогично соединим второй и третий блоки.
10. Создаим ответвление от блокаStepдля этого:
· Установим курсор в точку ответвления.
· Нажмем клавишу [Ctrl] и одновременно левую кнопку мыши, удерживая их нажатыми проведем линию к нужному блоку.
11. Запустим процесс моделирования, щелкнув по кнопке Start simulationна панели инструментов  .
.
12.Для получения результатов моделирования дважды щелкнем мышью по изображению блоков индикаторов ScopeиScope1.
13. Изменение коэффициента усиления блока Gain:
· Щелкнем дважды на изображение блока Gain.
· В появившемся окне настроек вместо значения 1 введем 3,5.
· Нажмем последовательно кнопки Apply(Применить) и OK(Закрыть).
14. Запустим процесс моделирования и откроем блок Scope. Убедимся в том, что верхняя полка изображения скачка не умещается в поле индикатора. Для управления параметрами окна индикатора Scope щелкнем на кнопку автоматической установки оптимального масштаба осей  .
.
15. Изменение параметров настройки блока Step:
· Щелкнем дважды на изображение блока Step.
· В появившемся окне настроек вместо значения Step time (время наступления скачкообразного изменения сигнала) равного 1 введем 0. В результате скачкообразное изменение сигнала на выходе блока будет происходить без задержки (на 1 сек) после начала процесса моделирования.
· Нажмем последовательно кнопки Apply (Применить) и OK (Закрыть).
16. Запустим процесс моделирования, щелкнув по кнопке Startна панели инструментов, активизируем окна индикаторов Scope и Scope1 и убедимся в произошедших изменениях.

Рисунок 9 – Блок схема моделирования безынерционного звена, коэффициент усиления блока Gain изменен на 3,5

Рисунок 10 – Окно блока Scope после изменения коэффициента усиления блока Gain

Рисунок 11 – Окно Scope после изменения значения Steptime блока Step
Дата добавления: 2018-04-15; просмотров: 447; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!