Список использованных источников
Министерство образования и науки Российской Федерации
Федеральное государственное бюджетное
образовательное учереждение высшего образования
«Комсомольский-на-Амуре государственный технический университет»
Кафедра «Электропривод и автоматизация промышленных установок»
МЕХАНОТРОНИКА
Методические указания к контрольным работам
Для студентов направлений подготовки
13.03.02 – «Электроэнергетика и электротехника»
27.04.04 – «Управление в технических системах»
11.03.04 – «Электроника и наноэлектроника»
Комсомольск-на-Амуре
2017
УДК 681.3.06
Механотроника: Методические указания к контрольным pаботам по куpсу " Механотроника " /Сост. В.А.Егоpов - Комсомольск-на-Амуpе: ФГБОУ ВО «КнАГТУ», 2017. - 13 с.
Приведены теоретические сведения, задания и пример выполнения контрольных работ по курсу " Механотроника ".
Пpедназначены для студентов направлений 13.03.02 – «Электроэнергетика и электротехника», 27.04.04 – «Управление в технических системах», 11.03.04 – «Электроника и наноэлектроника» дневной и заочной фоpм обучения.
Печатается по решению учебно-методического совета ФГБОУ ВО «Комсомольский-на-Амуpе госудаpственный технический унивеpситет».
Согласовано с отделом менеджмента качества.
Рецензент: С.М. Копытов
Редактор: Ю.Н. Осинцева
_____________________________________________________________
Подписано в печать
|
|
|
Формат 60 х 84 1/16. Бумага офисная. Ризограф RISO RZ 370EP.
Усл. печ. л. Уч. –изд. л. Тираж 30. Заказ Бесплатно.
Редакционно-издательский отдел Федерального государственного бюджетного образовательного учереждения высшего образования
«Комсомольский-на-Амуре государственный технический университет»
681013, Комсомольск-на-Амуре, пр. Лениена, 27.
Полиграфическая лаборатория Федерального государственного бюджетного образовательного учереждения высшего образования
«Комсомольский-на-Амуре государственный технический университет»
681013, Комсомольск-на-Амуре, пр. Лениена, 27.
Теоретические сведения
1.1. Порядок синтеза последовательной коррекции:
Исходными данными для синтеза являются две характеристики реакции выходной координаты на скачек входного сигнала (время переходного процесса tп и перерегулирования G).
1. Задавшись желаемым tп, находят частоту среза ωсрразомкнутой системы. Задавшись G, находят запас по фазе Δφна частоте среза.
2. Используя ωсриΔφ,строят желаемую LАЧХ и LФЧХ системы, которым соответствует передаточная функция Wж раз(p).
3. Находят закон управления (передаточную функцию регулятора) из соотношения:
Ключевым моментом в описанной процедуре является определение соотношений:
|
|
|

с использованием номограмм, что не совсем удобно.
Кроме того, для формирования вида желаемой LАЧХ необходимо иметь определённый опыт.
Указанные недостатки побудили к поиску типовых настроек с типовой желаемой LАЧХ и типовой реакцией настроек системы на скачек, что привело к появлению, так называемых технических оптимумов.
Синтез последовательной коррекции с использованием технических оптимумов
1.2.1. Настройка на оптимум по модулю (МО):
В этом случае:  ,
,
где Тм – эквивалентная малая постоянная времени объекта.
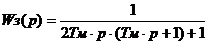
Если  , то
, то  .
.
 LАЧХ системы состоит из LАЧХ интегратора и апериодического звена и имеет вид:
LАЧХ системы состоит из LАЧХ интегратора и апериодического звена и имеет вид:
Реакция замкнутой системы на скачок:
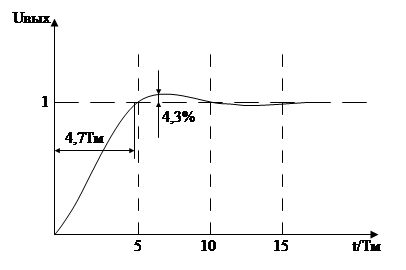
tnn=10Тм
Передаточная функция замкнутой системы: (при единичной ОС)
1.2.2. Настройка на симметричный оптимум (СО):
В этом случае:
 .
.
Или при представлении элементарными звеньями:

Соответствующая LАЧХ и LФЧХ имеют вид:
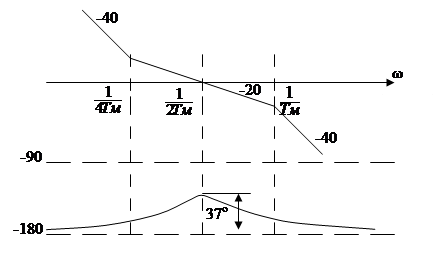
|
|
|
Реакция замкнутой системы на скачок:
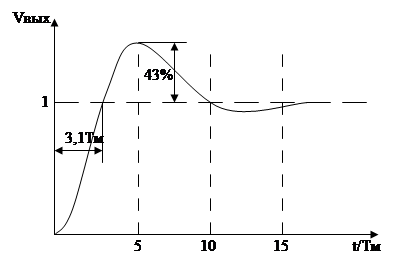
tnn=20Тм
Передаточная функция замкнутой системы:
 .
.
Задание для выполнения
1. Для двигателя постоянного тока независимого возбуждения (ДПТ НВ) с параметрами из табл.1 произвести настройку контура тока на МО и контура скорости на СО и на МО.
(Выбор варианта задания осуществлять по последней цифре номера зачетной книжки.)
Таблица 1
| Вариант | Тип двигателя | Параметры двигателя | |||||
| Мд.н., Н*м | Uя.н., В | rя, Ом | Jд, кгм² | Тя, мс | Iд.н. А | ||
| 1 | ПБВ100МГУ3 | 7,2 | 60 | 0,40 | 0,11 | 32 | 3,6 |
| 2 | ПБВ100LГУ3 | 10,5 | 60 | 0,21 | 0,16 | 33 | 7,35 |
| 3 | ПБВ112МГУ3 | 14,3 | 80 | 0,17 | 0,37 | 36 | 11,44 |
| 4 | ПБВ112LГУ3 | 21,0 | 110 | 0,22 | 0,54 | 39 | 12,6 |
| 5 | ПБВ132ГУ3 | 38,2 | 85 | 0,07 | 1,60 | 58 | 34,38 |
| 6 | ПБВ132LГУ2 | 52,5 | 110 | 0,09 | 2,20 | 66 | 36,75 |
| 7 | ПБВ100МГУ2 | 7,2 | 120 | 0,6 | 0,11 | 32 | 3,6 |
| 8 | ПБВ100LГУ2 | 10,5 | 120 | 0,4 | 0,16 | 33 | 7,35 |
| 9 | ПБВ112МГУ2 | 14,3 | 160 | 0,4 | 0,37 | 36 | 11,44 |
| 10 | ПБВ132ГУ2 | 38,2 | 160 | 0,2 | 1,60 | 58 | 34,38 |
| 11 | ПБВ112LГУ2 | 21,0 | 220 | 0,6 | 0,54 | 39 | 12,6 |
Примечания:
|
|
|
- номинальная частота вращения всех двигателей nд.н.= 1000 об·минˉ¹;
- момент инерции Jд должен быть пересчитан в Нм2 (в 1кг – 9,8Н).
2. Произвести моделирование контуров:
2.1. контура тока;
2.2. всей скоростной системы с настройкой на СО;
2.3. всей скоростной системы с настройкой на МО.
3. Получить реакцию на скачок управляющего сигнала для:
3.1. контура тока;
3.2. всей системы настроенной на СО;
3.2. всей системы настроенной на МО.
4. Исследовать реакции на скачок возмущающего воздействия (наброс нагрузки) при фиксированном задающем воздействии для всей системы настроенной на СО и настроенной на МО.
Примечание:
-на защите работы иметь с собой на флэш-накопителе все модели механотронной системы.
Список использованных источников
1. С.Г. Герман-Галкин. Проектирование мехатронных систем на ПК. -СПб.: КОРОНА -Век, 2008.- 368 с.
2. А.В.Башарин, В.А.Новиков, Г.Г. Соколовский. Управление электроприводами (Для студентов ВУЗов). Ленинград, Энергоиздат, Ленинградское отделение,1982.
Пример выполнения задания
(В примере выполнены расчёты и моделирование для варианта 11.)
Задание для выполнения
| Вариант | Тип двигателя | Параметры двигателя | |||||
| Мд.н., Н*м | Uя.н., В | rя, Ом | Jд, кгм² | Тя, мс | Iд.н. А | ||
| 11 | ПБВ112LГУ2 | 21,0 | 220 | 0,6 | 0,54 | 39 | 12,6 |
1. Для двигателя постоянного тока независимого возбуждения (ДПТ НВ) с параметрами из табл.1 произвести настройку контура тока на МО и контура скорости на СО.
2. Произвести моделирование контуров:
2.1. контура тока;
2.2. всей скоростной системы с настройкой на СО.
3. Получить реакцию на скачок управляющего сигнала всей системы настроенной на СО;
4. Исследовать реакцию на скачок возмущающего воздействия (наброс нагрузки) при фиксированном задающем воздействии для всей системы настроенной на СО.
Структурная схема исследуемой механотронной системы приведена на рисунке 1
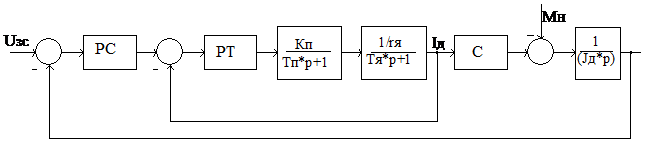 Рисунок 1 – Структурная схема исследуемой механотронной системы
Рисунок 1 – Структурная схема исследуемой механотронной системы
Настройка контура тока на МО
Передаточная функция объекта контура тока описывается формулой (1)

Желаемая передаточная функция разомнткнутой системы при настройке на модульный оптимум имеет вид:

Тогда, передаточная функция регулятора контура тока имеет вид:

Заменим  в уравнении (3) и получим передаточную функцию регулятора тока:
в уравнении (3) и получим передаточную функцию регулятора тока:

Коэффициент регулятора тока

Постоянная времени регулятора тока
Структурная схема контура тока, настроенного на модульный оптимум приведена на рисунке 2.
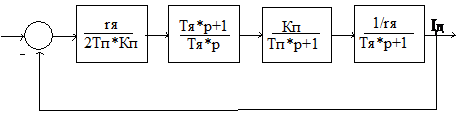
Рисунок 2 – Структурная схема контура тока, настроенного на модульный оптимум
Дата добавления: 2018-04-15; просмотров: 256; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!