Метод последовательного наращивания
МИНОБРНАУКИ РОССИИ
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
«Ижевский государственный технический университет имени М.Т. Калашникова»
(ФГБОУ ВПО «ИжГТУ имени М.Т. Калашникова»)
Кафедра «Мехатронные системы»
Никитин Ю.Р.
Методическое пособие к выполнению курсовой работы
По дисциплине
«Электронные устройства мехатронных и робототехнических систем 2
(Схемотехника устройств управления)»
для студентов направления 15.03.06 «Мехатроника и робототехника»
по профилю «Мехатронные системы в машино- и приборостроении»
Ижевск 2018
Содержание
Введение.................................................................................................................................................3
1 Цели и задачи курсовой работы........................................................................................................3
2 Содержание курсовой работы и основные этапы проектирования...............................................3
2.1 Разработка электрической принципиальной схемы...........…………………………….....4
2.2 Разработка печатной платы………………………………………………………………..15
2.3 Оформление конструкторской документации…………………………………………….24
3 Примерные темы курсовых работ………………………………………………………………...28
4 Перечень вопросов на защиту курсовой работы…………………………………………………28
Рекомендуемая литература............................................................…………………………………..29
|
|
|
Приложение А (обязательное). Варианты заданий на курсовую работу…………………………31
Приложение Б (обязательное). Варианты заданий вентильных двигателей……………………...33
Приложение В (справочное). Сайты с характеристиками шаговых двигателей и
двигателей постоянного тока………………………………………………………………………...37
Приложение Г (справочное). Характеристики шагового двигателя ДШР 39-0,006-1,8…………38
Приложение Д (справочное). Пример схемы электрической принципиальной………………….40
Приложение Е (справочное). Пример перечня элементов…………………………………………41
Приложение Ж (справочное). Пример платы печатной……………………………………………42
Приложение И (справочное). Пример сборочного чертежа………………………………………..43
Приложение К (справочное). Пример спецификации……………………………………………...44
Приложение Л (справочное). Наиболее часто встречающиеся отклонения от ЕСКД………...…45
Введение
Основной целью выполнения курсовой работы является развитие и закрепление навыков проектирования современных электронных устройств мехатронных и робототехнических систем в составе микропроцессорных устройств управления. Курсовая работа выполняется по индивидуальным заданиям.
|
|
|
1 Цели и задачи курсовой работы
Целью курсовой работы является разработка электронного устройства (ЭУ) управления электрическим двигателем механизма мехатронных и робототехнических систем. В ходе проектирования студент должен познакомиться с современной элементной базой электроники, с методами конструирования электронных устройств и практикой оформления конструкторской документации.
2 Содержание курсовой работы и основные этапы проектирования
Объектом проектирования является ЭУ управления электрическим двигателем механизма мехатронных и робототехнических систем.
Задание на курсовую работу содержит следующие исходные данные:
- электрический двигатель – объект управления;
- тип транзисторов для усилителя мощности;
- режим работы объекта управления.
В результате проектирования должны быть разработаны:
- схема электрическая принципиальная ЭУ, выполненная на 1 листе формата А3...А2;
- перечень элементов к схеме электрической принципиальной, выполненный на 2...3 листах формата А4;
- чертеж печатной платы усилителя мощности, выполненный на 1 листе формата А3..А2;
|
|
|
- сборочный чертеж ЭУ, выполненный на 1 листе формата А3...А2;
- спецификация ЭУ, выполненная на 2...3 листах формата А4;
- пояснительная записка, выполненная на 20...40 листах формата А4.
Пояснительная записка должна содержать следующие разделы:
– титульный лист;
– задание (1 лист), содержащее свой вариант с расшифровкой исходных данных;
– введение, в котором описывается решаемая в задача, объект управления и имеющиеся аналоги или возможные способы решения этой задачи, а также краткое описание всей работы (2..4 листа);
– анализ задания и обоснование выбора того или иного пути решения (2..3 листа);
– разработка схемы электрической принципиальной ЭУ с обоснованием выбора элементной базы и необходимыми расчетами (3..5 листов);
– обоснование конструкции ЭУ (3..5 листов);
– материалы макетирования и исследований (3..6 листов) по согласованию с руководителем курсовой работы;
– заключение;
– список литературы;
– приложения.
Курсовая работа выполняется по учебному плану в течение 12 недель.
|
|
|
2.1 Разработка электрической принципиальной схемы
Электрический преобразователь в силовом канале электропривода выполняет роль связующего звена между источником электрической энергии (как правило - сеть переменного тока 50 Гц) и двигателем. На него возлагаются задачи регулирования напряжения, частоты и формирование одно- или двуполярных токов в обмотках электрической машины. Для приводов переменного тока формируется многофазная система синусоидальных токов с регулируемыми частотой, фазой и амплитудой первой гармоники напряжения. Кроме собственно регулирования подводимых к двигателю тока, напряжения и частоты, преобразователь должен выполнять и функции защиты как себя самого, так и привода в целом при возникновении перегрузок или аварийных ситуаций.
В области регулируемого привода примерно половину составляет массовый привод с мощностью от долей до десятков киловатт. Основным элементом преобразователя на такие мощности являются в настоящее время полупроводниковые ключи различного типа.
В основе большого разнообразия схемотехнических решений силовой части преобразователя лежат два способа: фазовый и широтно-импульсная модуляция.
Фазовый способ управления используется при применении неполностью управляемых ключей (тиристоров, триаков). Он с успехом применяется для питания двигателей постоянного тока от сети переменного тока - система ТП-Д (тиристорный преобразователь - двигатель), для регулирования напряжения асинхронных двигателей - система ТРН-АД (тиристорный регулятор напряжения - асинхронный двигатель), а также в простейших однофазных схемах регулирования в бытовой технике. Возможности фазового управления ограничены тем, что напряжение на нагрузке формируется из участков синусоидального напряжения питания, причем управляющим воздействием является момент включения, а отключение происходит либо в момент естественного спадания тока до нуля, либо за счет принудительного приложения к ключу обратного напряжения при включении ключа другой фазы источника питания. Это не позволяет плавно регулировать частоту напряжения на нагрузке и получать частоту выше частоты питающей сети, вызывает искажения в форме токов и напряжений.
Широтно-импульсная модуляция (ШИМ) постоянного напряжения питания свободна от указанного недостатка, но требует полностью управляемых ключей. Частотные свойства ШИМ ограничиваются только конечным временем включения и отключения полупроводникового ключа. При достаточно высокой частоте коммутации индуктивности обмоток электрической машины являются естественными низкочастотными фильтрами, что обеспечивает возможность более качественного формирования требуемых токов и напряжений. Определенным недостатком ШИМ-регулирования является возрастание дополнительных потерь в полупроводниковом ключе при увеличении несущей частоты ШИМ.
ШИМ с однополярным включением источника питания - наиболее простая конфигурация. Она имела до недавнего времени ограниченное применение (маломощные вентильные и шаговые двигатели), так как традиционные машины переменного тока требуют двуполярного питания. Бурное развитие в последние десятилетия техники вентильных электроприводов, особенно с так называемым "переключаемым магнитным сопротивлением" (SRD - switched reluctance drive), открывает возможность использования этой конфигурации в массовом электроприводе.
Мостовое соединение ключей и обмотки двигателя позволяет получать двуполярное напряжение на обмотке при однополярном источнике питания. Кроме того, такая конфигурация имеет большие, по сравнению однополярным включением, возможности управления. При замыкании двух ключей в диагонали моста к обмотке прикладывается полное напряжение питания, что вызывает нарастание тока. При размыкании одного из ключей обмотка оказывается закороченной через оставшийся замкнутым ключ и обратный диод в противоположном плече моста, что приводит к постепенному спаданию тока за счет падения напряжения в самой обмотке и противо-ЭДС вращения. При размыкании всех ключей или замыкании ключей противоположной диагонали к обмотке прикладывается напряжение противоположного знака, что вызывает форсированное спадание тока. Усложнение алгоритма формирования ШИМ за счет комбинирования трех возможных состояний ключей, изменения частоты следования и длительности импульсов в функции требуемой формы тока, может минимизировать число переключении и потери в ключах.
Мостовое соединение не допускает одновременного включенного состояния верхнего и нижнего ключей в плече моста, так как это вызывает короткое замыкание источника питания.
При разработке схемотехнических решений силового канала и алгоритмов управления силовыми ключами необходимо учитывать особенности, характерные для любого типа электродвигателя, как нагрузки для преобразователя:
- сильно индуктивный характер;
- наличие противо-ЭДС вращения;
- возможные кратковременные, но многократные перегрузки по току;
- близость начального этапа пуска к режиму короткого замыкания;
- рекуперация механической энергии в динамических и тормозных режимах;
- взаимосвязь электрических и магнитных контуров разных фаз.
Дополнительно следует иметь ввиду, что большое разнообразие объектов и их требований к электроприводу (номинальные значения, диапазон, точность и плавность регулирования скорости, способы защиты и управления) не позволяет пока создать полностью универсальное решение. В то же время типизация схемотехники силовых ключей и перенос центра тяжести из области аппаратных средств в сферу программируемого решения облегчают разработчику задачу и расширяют области применения унифицированных электроприводов.
Для частотнорегулируемых асинхронных электроприводов массового применения общепринята конфигурация автономного инвертора со звеном постоянного тока, состоящая их входного неуправляемого выпрямителя, емкостного фильтра и собственно трехфазного мостового инвертора.
Индуктивный характер нагрузки учитывается подключением параллельно транзисторным ключам диодов, обеспечивающих непрерывность цепи протекания тока в обмотке при отключении ее от источника питания и возврат запасенной магнитной энергии в конденсатор фильтра.
В электроприводах, имеющих в цикле работы участки рекуперации механической энергии или высокую интенсивность тормозных режимов, для "слива" рекуперированной электрической энергии приходится предусматривать специальную цепь из дополнительного ключа и резистора, рассеивающего эту энергию. Это необходимо, так как входной выпрямитель не может проводить ток в обратном направлении.
Большинство специфических требований электропривода учитывается в алгоритмах управления. Требования к значениям параметров силовых ключей носят общий для всех применений силовой электроники характер. Это достаточные для получения требуемой мощности номинальные токи и напряжения, минимальные время переключения, прямое падение напряжения в открытом состоянии и энергия выключения. Для массовых применений конкретизация требований к силовым элементам выглядит следующим образом:
- напряжение питания одно- или трехфазное 220 или 380 В;
- токи от единиц до сотен ампер;
- частота коммутации от долей герца до 20 кГц;
- защита от перенапряжений, коротких замыканий в нагрузке и сквозных токов.
Последнее требование имеет особо важное значение, так как в значительной степени определяет надежность работы преобразователя и его живучесть. Современные преобразователи имеют развитую многоступенчатую систему защиты, реализованную как на программном, так и на аппаратном уровне. Схемотехническая поддержка на уровне конструкции полупроводникового ключа облегчает техническую реализацию защитных функций. Для силовых ключей в электроприводе специально установлен параметр стойкости к коротким замыканиям.
При практической реализации силового канала преобразователя разработчик может использовать силовые ключи в виде дискретных компонентов или интегральных гибридных сборок.
Для реверсивного управления двигателями постоянного тока возможно использование интегрального H-мостового драйвера, например, микросхемы L298N. Микросхема L298N обеспечивает защиту микроконтроллера от скачков напряжений в непредвиденных аварийных ситуациях. На рисунке 1 представлена схема подключения драйвера L298N к двигателям постоянного тока.

Рисунок 1 – Схема подключения драйвера L298N к двигателям постоянного тока
Характеристики драйвера L298N:
- возможность управлять одновременно двумя двигателя постоянного тока;
- рабочее напряжение от 5 до 35 Вольт;
- дополнительное напряжение для логики 5В;
- рабочий выходной ток на канал двигателя 2А;
- максимальная потребляемая мощность 20 Вт.
Расчет сопротивления резисторов R1, R2.
 ;
;
U – напряжение питания 9 В;
I – пусковой ток двигателя 0.4 А;
 .
.
Выбираем из ряда резисторов ближайшее сопротивление 20 Ом.
Аналогичный драйвер L293D отличается высоким быстродействием, относительно низкой стоимость по сравнению с другими аналогами и доступностью.
Драйвер L293D имеет характеристики:
- максимальное рабочее напряжение U=36 В;
- напряжение питания микросхемы Uпит=5 В;
- допустимый ток нагрузки - 600mA (на каждый канал);
- пиковый (максимальный) ток на выходе - 1,2A (на каждый канал).
Драйвер совместим со схемами, работающими под напряжением +3,3 В, +5В.
Для реверсивного управления двигателями постоянного тока возможно использование интегрального H-мостового драйвера, например, микросхемы VNH2SP30. Данная микросхема содержит сдвоенный монолитный HSD - блок привода (драйвер верхнего плеча) и два нижних силовых ключа. Максимальный выходной ток VNH2SP30 составляет 30 A, широкий диапазон напряжения питания 5.5V…16V. Входные управляющие выводы совместимы с логическими уровнями 5V, а скоростью вращения электродвигателя можно управлять с помощью PWM (ШИМ)-регулирования выходного тока с частотой до 10 kHz. Входные управляющие сигналы VNH2SP30, INA и INB, соответствуют плечу моста (рисунок 2). Для прямого направления – INA – должен быть в единице, а INB – в нуле. Для обратного вращения – наоборот. Контроль тока и правильность работы моста – индицируется сигналами: DIAGA и DIAGB. Контроль за величиной тока двигателя осуществляется через вывод CS. Напряжение на выходе CS – пропорционально среднему току. Это напряжение может подаваться на входы АЦП, встроенные в микроконтроллер. Два других вывода, DIAGA/ENA или DIAGB/ENB, когда к ним подключен внешний подтягивающий резистор, дают возможность пользователю выбирать одно из плеч моста, а также использовать цифровой диагностический сигнал обратной связи.

Рисунок 2 – Структурная схема драйвера
На рисунке 3 представлена схема электрическая принципиальная драйвера двух двигателей постоянного тока с учетом метода управления двигателями постоянного тока приводов колес и других принятых конструктивных решений. На рисунке 4 изображена печатная плата драйвера, а на рисунке 5 драйверы приводов в сборе на 2 привода.

Рисунок 3 – Схема устройства управления двумя приводами мобильного робота
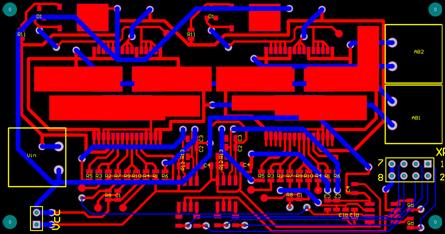
Рисунок 4 – Плата печатная драйвера двух приводов мобильного робота

Рисунок 5 – Драйвер приводов мобильного робота
Ниже приведен пример расчета схемы усилителя мощности.
 |
Рисунок 6 – Схема регулятора напряжения и усилителя мощности
Согласно заданию выходной ток через индуктивную нагрузку составляет восемь ампер, т.е. ток Iк2=8 А. Тогда ток базы VT2:
IБ2 = IК2·S2/b2,
где S2 - коэффициент насыщения VT2.
Пренебрегая отличием токов эмиттера и коллектора, а также частью тока, ответвляющего в резистор R6, можно записать:
I К1 ≈ IЭ1 ≈ IБ2.
Ток базы транзистора VT1 равен:

С целью уменьшения длительности среза выходного импульса тока примем величину коэффициентов насыщения транзисторов VT1 и VT2 равными S1 = S2 = S = 1,5. Тогда коэффициент усиления по току усилителя мощности равен:


В качестве ключевого элемента необходим транзистор VT2 с допустимым напряжением коллектор-эмиттер:
UКЭ.ДОП.≥ 1,5·UБС;
UКЭ.ДОП.≥ 1,5·27 = 40,5 В.
Выбираем транзистор VT2 типа КТ908Б с параметрами:
Uкэmax=60 В, h21э=20-60,
Iкmax=10 A, Cк≤700 нФ,
Iкэс≤50 мA, fгр≤30 МГц,
Uкэнас=0,25-1,0 В, Ркmax=50 Вт,
Uбэнас=1,2-2,3 В.
Определяем средний коэффициент передачи по току:


Найдем постоянную времени в области высоких частот tв

где RК = UБС/IОВ = 27/8 = 3,38 Ом.


Тогда длительность фронта импульса напряжения на коллекторе равна:


tФ » 0,35 мкс.
Данное значение вполне приемлемо. Длительность среза, как правило, значительно меньше длительности фронта.
Найдем тепловой ток IКБО2

Коэффициент передачи по току транзистора VT1 должен быть не менее:

В качестве усилителя мощности VT1 выберем транзистор КТ630Е с параметрами:
UКЭMAX=60 B,
h21Э=160-480,
Iнmax=1 A,
Cк ≤ 15 пФ,
Iкбо ≤ 1 мкА,
fгр ≥ 50 МГц,
Uкэнас=0,11 В,
Uбэнас=0,85 В.
Ркmах=0,8 Вт,
Найдем ток Iкэс1 транзистора VT1:
IКЭС1 = IКБО1·(β1СР +1);
β1СР = (160 + 480)/2 = 320;
IКЭС1 = 1·10 -6·(320+1) = 0,321·10-3 А.
Определим сопротивление резистора R7:
R7 < UБЭ.НАС.2/(IКБО2 + IКЭС1);
UБЭ.НАС.2 = (U БЭ.НАС.2min+U БЭ.НАС.2max)/2;
UБЭ.НАС.2=(1,2 +2,3)/2 = 1,75 В;
R7 < 1,75/(1,22·10-3 +0,321·10-3) = 1,44·103 Ом.
Выберем величину сопротивления R7 в 680 Ом. Мощность, рассеиваемая в нем, равна:
PR7 = IR72·R7;
PR7 = (1,541·10-3)2·680 ≈ 2 мВт.
Выбираем резистор R7 типа МЛТ-0,125-680 Ом ± 10%.
Ток базы VT2 равен:


Ток через резистор R7 равен:
IR7 = UБЭ2НАС.СР/R7;
IR7 = 1,75/680 = 2,6·10-3 А,
где UБЭ2НАС.СР – среднее значение напряжения насыщения база-эмиттер VT2.
Так как величина коэффициента a1 мало отличается от единицы, то можно записать:
IK1 ≈ IЭ1 = IБ2 + IR7 ≈ IБ2;
тогда величину сопротивления R6 можно найти по формуле:
R6 = (UБС – UКЭ1НАС – UКЭ2НАС)/IK1;
R6 = (27– 0,11 – 1,75)/0,3 = 83,8 Ом.
Амплитудное значение мощности, рассеиваемой на R6, равно:
PR6m = IK12·R6;
PR6m = (0,3)2·83,8 = 7,54 Вт.
Учитывая потери в индуктивной нагрузке принимаем, что ток IК1 и, соответственно, IК2 течет в течение 0,7 периода работы усилителя мощности; тогда средняя мощность, рассеиваемая в резисторе R6 равна:
PR6 = PR6m·0,7;
PR6 =7,54·0,7 = 5,3 Вт.
Выбираем с запасом мощности четыре параллельно соединенных резистора типа МЛТ-2-330 Ом ± 10%.
Сопротивление резистора R5 рассчитаем по формуле:
R5 = (UВЫХ.ОУmax – UБЭ1НАС – UБЭ2НАС)/IR5,
где IR5 = IВЫХ.ОУm – IПОС = 5·10-3 – 1,8·10-3 = 3,2·10-3 А;
R5 = (24– 0,11 – 1,75)/3,2·10–3 = 6,92·103 Ом.
Мощность, рассеиваемая на резисторе R5, равна
PR5 = IR52·R5 = (3,2·10-3)2·6,92 = 70,9·10-6 Вт.
В качестве R5 выбираем резистор типа МЛТ-0,125-6,8 к ± 5%.
Необходима гальваническая развязка микроконтроллера от силовой части схемы. Гальваническая развязка может быть реализована либо трансформаторами, либо оптопарами. Параметрами гальванической развязки оптопар являются: максимально допустимое пиковое напряжение между входом и выходом Uразв п max; максимально допустимое напряжение между входом и выходом Uразв max; сопротивление гальванической развязки Rразв; проходная емкость Cразв; максимально допустимая скорость изменения напряжения между входом в выходом (dUразв/dt)max. Важнейшим является параметр Uразв п max. Именно он определяет электрическую прочность оптопары и ее возможности как элемента гальванической развязки.
Рассмотренные параметры оптопар полностью или с некоторыми изменениями используются и для описания оптоэлектронных интегральных микросхем.

Рисунок 7 – Условные обозначения оптопар
Диодные оптопары (рис. 7, а) в большой степени, чем какие-либо: другие приборы, характеризуют уровень оптронной техники. По величине Кi можно судить о достигнутых КПД преобразования энергии в оптроне; значения временных параметров позволяют определить предельные скорости распространения информации. Подключение к диодной оптопаре тех или иных усилительных элементов, весьма полезное и удобное, не может тем не менее дать выигрыша ни по энергетике, ни по предельным частотам.
Транзисторные оптопары (рис. 7, c) рядом своих свойств выгодно отличаются от других видов оптронов. Это прежде всего схемотехническая гибкость, проявляющаяся в том, что коллекторным током можно управлять как по цепи светодиода (оптически), так и по базовой цепи (электрически), а также в том, что выходная цепь может работать и в линейном и в ключевом режиме. Механизм внутреннего усиления обеспечивает получение больших значений коэффициента передачи тока Кi, так что последующие усилительные каскады не всегда необходимы. Важно, что при этом инерционность оптопары не очень велика и для многих случаев вполне допустима. Выходные токи фототранзисторов значительно выше, чем, например, у фотодиодов, что делает их пригодными для коммутации широкого круга электрических цепей. Наконец, следует отметить, что все это достигается при относительной технологической простоте транзисторных оптопар.
Тиристорные оптопары (рис. 7, b) наиболее перспективны для коммутации сильноточных высоковольтных цепей: по сочетанию мощности, коммутируемой в нагрузке, и быстродействию они явно предпочтительнее Т2-оптопар. Оптопары типа АОУ103 предназначены для использования в качестве бесконтактных ключевых элементов в различных радиоэлектронных схемах: в цепях управления, усилителях мощности, формирователях импульсов и т. п.
Резисторные оптопары (рис. 7, d) принципиально отличаются от всех других видов оптопар физическими и конструктивно-технологическими особенностями, а также составом и значениями параметров.
В основе принципа действия фоторезистора лежит эффект фотопроводимости, т. е. изменения сопротивления полупроводника при освещении.
При передаче информации оптроны используются в качестве элементов связи, и, как правило, не несут самостоятельной функциональной нагрузки. Их применение позволяет осуществить весьма эффективную гальваническую развязку устройств управления и нагрузки (рис. 8), действующих в различных электрических условиях и режимах. С введением оптронов резко повышается помехоустойчивость каналов связи; практически устраняются "паразитные" взаимодействия по цепям "земли" и питания. Интерес представляет также рациональное и надежное согласование цифровых интегральных устройств с разнородной элементной базой (ТТЛ, ЭСЛ, И2Л, КМОП и т. п).

Рисунок 8 – Схема межблочной гальванической развязки
Схема согласования элемента транзисторно-транзисторной логики (ТТЛ) с интегральным устройством на МДП-транзисторах построена на транзисторном оптроне (рисунок 9). В конкретном варианте: E1 = Е2 = 5 В, Е3 = 15 В, R1 = 820 Ом, R2 = 24 кОм - светодиод оптрона возбуждается током (5 мА), достаточным для насыщения транзистора и уверенного управления устройством на МДП-транзисторах.

Рисунок 9 – Схема сопряжения ТТЛ и МДП элементов по оптическому каналу
Введение оптических связей в электронную измерительную аппаратуру, кроме полезной во многих отношениях гальванической развязки исследуемого объекта и измерительного прибора, позволяет также резко уменьшить влияние помех, действующих по цепям заземления и питания.
В комплексе технических решений, ориентированных на повышение эффективности и качества устройств автоматики, радиотехники, электросвязи, промышленной и бытовой электроники, целесообразной и полезной мерой является замена электромеханических изделий (трансформаторов, реле, потенциометров, реостатов, кнопочных и клавишных переключателей) более компактными, долговечными, быстродействующими аналогами. Ведущая роль в этом направлении отводится оптоэлектронным приборам и устройствам. Дело в том, что весьма важные технические достоинства трансформаторов и электромагнитных реле (гальваническая развязка цепей управления и нагрузки, уверенное функционирование в мощных, высоковольтных, сильноточных системах) свойственны и оптронам. Вместе с тем оптоэлектронные изделия существенно превосходят электромагнитные аналоги по надежности, долговечности, переходным и частотным характеристикам. Управление компактными и быстродействующими оптоэлектронными трансформаторами, переключателями, реле уверенно осуществляется с помощью интегральных микросхем цифровой техники без специальных средств электрического согласования.
Пример замены импульсного трансформатора приведен на рисунке 10.

Рисунок 10 – Схема оптоэлектронного трансформатора
2.2 Разработка печатной платы
Печатная плата (ПП) – это элемент конструкции состоящий из диэлектрического основания с нанесёнными на её поверхность плоскими проводниками, в виде участков металлизированного покрытия, которые обеспечивают соединение электрической цепи.
Контактная площадка – часть печатного проводника на поверхности, в отверстии или толще основания, используемая для соединения навесных элементов или для контрольных подсоединений. Существует библиотека контактных площадок стандартной формы под различные элементы (ГОСТ 23751-79).
При конструировании ПП необходимо использовать четыре критерия:
1) габаритный;
2) точности рисунка и толщины проводящего слоя;
3) числа слоёв;
4) материала основания.
Выбор габаритов ПП должен исходить из разбиения схемы электрической принципиальной на функциональные узлы. При выборе размера необходимо придерживаться ГОСТ 10317-79 «Печатные платы. Основные размеры»
Размеры ПП меняются следующим образом:
1) шаг 2,5 до 100 мм;
2) шаг 5 мм, 100..350 мм;
3) шаг 10 мм, 350..470 мм.
Отношение сторон не более 1:4.
Предпочтительным является размер 170*75 мм.
Этот нелинейный размер из рекомендуемого ряда обладает следующими достоинствами перед большими ПП:
Этот нелинейный размер из рекомендуемого ряда обладает следующими достоинствами перед большими ПП:
1) слабым короблением;
2) хорошим теплообменом в центре платы;
3) высокой ремонтопригодностью;
4) низкими ударными нагрузками.
Наряду с этими достоинствами существуют и недостатки ПП малого размера:
1) требуются дополнительные соединители, что повышает трудоёмкость сборки и снижает надёжность;
2) с увеличением крепёжной арматуры увеличивается масса.
Поэтому в технически обоснованных случаях ряд типоразмеров изменяется в сторону увеличения.
В соответствии с ГОСТ 23751-86 для однослойной ПП (ОПП), двухслойной ПП (ДПП), многослойной ПП (МПП) установлены 5 классов точности рисунка, показанные в таблице 1.
Таблица 1 - Классы точности печатного рисунка
| Класс | Номинальная ширина проводника b, мм | Расстояние между проводниками δ, мм |
| 1 | 0,75 | 0,75 |
| 2 | 0,45 | 0,45 |
| 3 | 0,25 | 0,25 |
| 4 | 0,15 | 0,15 |
| 5 | 0,1 | 0,1 |
1, 2 класс используется для ПП с дискретными радиоэлементами при малой и средней насыщенности.
3 класс используется для ПП с микросборками и микросхемами, имеющие штыревые и планарные выводы, а также безвыводные ЭРЭ, при средней насыщенности.
4,5 класс используется для ПП как и третий класс, но с высокой насыщенностью элементов.
Многослойная ПП состоит из чередующихся диэлектрических слоёв с нанесенным на них рисунком.
Конструктор выбирает число слоёв ПП исходя из решения конкретной задачи. Но необходимо учитывать, что с ростом возможности трассировки в последовательности ОПП→ДПП→МПП растет трудоёмкость изготовления и снижается надёжность.
Материал основания и его толщина оказывают влияние на такие свойства ПП как:
1) жесткость;
2) собственная ёмкость;
3) теплопроводность.
Разработан ряд толщин основания ПП 0,1-0,2-0,4-гибкие; 0,8-1,0-1,5-2,0-3,0-жесткие.
Наибольшее распространение в получили толщины 1,0 и 1,5 мм., которые позволяют получение металлизированных отверстий с минимальным диаметром 0,32 и 0,48 мм. соответственно.
Для основания ПП применяют такие материалы как:
1) Фольгированный гетинакс ГФ – 1(2)-35(50);
2) Стеклотекстолит фольгированный СФ – 1(2)-35(50);
3) Диэлектрик фольгированный для многослойного печатного монтажа. ФДМ – 1(2) ;
4) СПТ – 3 – прокладочная стеклоткань;
5) СФТ – 1(2) – стеклотекстолит фольгированный травящийся;
6) СТФ – 1(2) - стеклотекстолит фольгированный теплостойкий.
Отметим, что постоянный ток в печатном проводнике равномерно распределяется по его сечению.
Режим постоянного тока характеризуется сопротивлением проводника:

 ;
;  ,
,
где  - поперечное сечение проводника;
- поперечное сечение проводника;
 - длина проводника;
- длина проводника;
 - удельное объемное электрическое сопротивление проводника.
- удельное объемное электрическое сопротивление проводника.
Величина для медного проводника составляет 0.0175 Ом*мм2/м.
Исходя из требований допустимого прогрева печатных проводников (80°C) экспериментально для них установлена допустимая плотность тока j 6-10 А/мм2. Для стабильной работы ПП должно выполняться условие:
 ,
,
где  - ток, протекающий в печатном проводнике.
- ток, протекающий в печатном проводнике.
Расчет на допустимую плотность тока следует проводить для узких проводников с шириной b<1 мм, в которых ток превышает по величине 2А.
При ширине проводника b≥1мм и толщине hп≥50мкм такой расчет обычно не проводиться.
Требуемая ширина сигнального проводника:

где – удельное сопротивление, Ом*мм2/м;
– ток, А;
- длина проводника, м;
 - допустимое падение напряжения (обычно не выше уровня статической помехоустойчивости интегральной микросхемы ~ 0,4…0,5В или 5% от напряжения питания).
- допустимое падение напряжения (обычно не выше уровня статической помехоустойчивости интегральной микросхемы ~ 0,4…0,5В или 5% от напряжения питания).
Паразитная емкость между проводниками вычисляется по формуле:
 ;
;
где  - коэффициент, зависящий от ширины проводников и их взаимного расположения;
- коэффициент, зависящий от ширины проводников и их взаимного расположения;
- длина взаимного перекрытия проводников, см;
 - диэлектрическая проницаемость среды, заключенной между проводниками.
- диэлектрическая проницаемость среды, заключенной между проводниками.
В зависимости от расположения проводников получены графики нахождения коэффициента .

Рисунок 11 - Графики нахождения коэффициента
 Для расположения 1 и 2 определяется по формуле:
Для расположения 1 и 2 определяется по формуле:
 ,
,
так как линии электрического поля проходят через воздух.
А для 3 и 4 случая:  , где
, где  - диэлектрическая проницаемость материала основания.
- диэлектрическая проницаемость материала основания.
Точность указанных формул по вычислению паразитных параметров относительно мала и колеблется от 20% до 30%, поэтому эти величины следует определять с помощью приборов.
Основой для выполнения чертежей ПП является шаг координатной сетки. Основной шаг: 2,5 мм. Дополнительные шаги: 1,25; 0,625; 0,3125. Координатная сетка позволяет не проставлять все размеры, а определять их по координатам.
При разработке конструкции и выполнении чертежа ПП, необходимо выполнять следующие правила:
1) Центры монтажных и переходных отверстий располагают в узлах (точках пересечения линий) координатной сетки.
2) Если 1-е условие не выполняется, то один вывод располагается в узле сетки, а второй - на горизонтальной или вертикальной линии сетки;
3)  Диаметр монтажных отверстий должен быть больше диаметра вывода на некоторую величину:
Диаметр монтажных отверстий должен быть больше диаметра вывода на некоторую величину:  при
при  и
и  при
при  . Для ПП с металлизированными отверстиями необходимо учитывать толщину слоя металлизации ПП, поэтому сверлить отверстия необходимо с диаметром
. Для ПП с металлизированными отверстиями необходимо учитывать толщину слоя металлизации ПП, поэтому сверлить отверстия необходимо с диаметром  .
.
4) Для надежного соединения печатного проводника с элементом, вокруг монтажного отверстия делают контактную площадку, чаще всего в виде кольца.
Диаметр контактной площадки в общем виде определяется по формуле:
 ,
,
где  – диаметр отверстия;
– диаметр отверстия;
 – минимальная радиальная толщина контактной площадки, зависит от плотности монтажа (для повышенной плотности -
– минимальная радиальная толщина контактной площадки, зависит от плотности монтажа (для повышенной плотности -  ; для пониженной -
; для пониженной -  )
)
 - величина, учитывающая разброс межцентрового расстояния (для разных технологий изготовления ПП –
- величина, учитывающая разброс межцентрового расстояния (для разных технологий изготовления ПП –  ).
).
5) Планарные (плоские) выводы микросхем требуют выполнения прямоугольных контактных площадок. На контактной площадке для первого вывода делается «ключ»:


6) Проводники на всём их протяжении должны иметь одинаковую ширину. При прохождении проводников через узкие места ширина их уменьшается, а затем вновь увеличивается. Либо при прохождении проводника через «узкое» место между контактами, ширина проводника остается прежней, а контактные площадки подрезаются.
Топологическим конструированием называется размещение ЭРЭ на рабочей площади ПП и трассировка соединений между контактными площадками.
При размещении расставляют навесные элементы на плате, распределяют контакты соединителей и размещают контрольные гнезда.
При трассировке прокладывают линии соединений (проводники между контактными площадками в соответствии со схемой электрической принципиальной).
Критерием наилучшего решения при топологическом конструировании ПП является достижение двух минимумов:
1) длины связей;
2) пересечений и переходных отверстий.
Несмотря на тесную связь размещения и трассировки, конструирование ПП начинается с предварительного размещения радиоэлементов и ИС.
По нормам компактного размещения ИС, МС, ЭРЭ их располагают рядами.
Рассмотрим ПП представленную на рисунке 12:
где 1 - посадочное место- площадь, занимаемая на ПП навесным элементом;
2 - рабочее место ПП - зона расположения посадочных мест;
3 - краевое поле ПП - предусматривается для технологических целей;
x - ширина краевого поля слева и справа зависит от формы выводов элементов и направляющих. Если они штыревые, то ширина поля равна 5 мм, для планарных- 2,5 мм;
y1 - ширина краевого поля cверху. При отсутствии контрольных гнезд принимается равной 2,5 мм, а с ними - 12,5 мм;
y2 - ширина краевого поля снизу. Определяется в зависимости от типа разъема (соединителя) и колеблется от 17,5 мм до 30 мм;
Lx и Ly – размеры ПП по осям x и y;
lx и ly – размеры посадочного места по осям x и y;
tx , ty – зазор установки элементов по осям x и y;
Рисунок 12 - Топологическое конструирование
Расчет общего числа посадочных мест или навесных элементов при одностороннем размещении производится по формуле:
 (1)
(1)
где число посадочных мест по оси x (  ) в одном ряду:
) в одном ряду:
 (2)
(2)
а число посадочных мест по оси y (  ) равно:
) равно:
 (3)
(3)
где шаг элементов:
 ,
,  .
.
Полученные значения и уменьшают до целого значения. После определения количества элементов возвращаются к трассировке.
При трассировке придерживаются следующих правил:
1) печатные проводники, соединяющие элементы схемы, должны иметь минимальную длину;
2) прокладывать рядом входные и выходные проводники не рекомендуется из-за возникновения паразитных связей;
3) проводники входных и выходных цепей целесообразно разделить экранирующими проводниками или шинами с нулевым потенциалом;
4)  цепи земляных шин, по которым текут максимальные токи, следует выполнять максимальной ширины;
цепи земляных шин, по которым текут максимальные токи, следует выполнять максимальной ширины;
5) печатный проводник, проходящий между двумя контактными площадками следует располагать так, чтобы его ось была перпендикулярной линии, соединяющей центры отверстий;
6) в узких местах допускается подрезка контактных площадок;
7) при трассировке проводников необходимо учитывать то, что выполнение её должно быть без резких перегибов и острых углов.
Методы изготовления ПП (рисунок 13):
- субтрактивный;
- аддитивный;
метод последовательного наращивания.
|

Рисунок 13 – Методы изготовления ПП
Субтрактивный метод (от лат. «отнимание») в настоящее время самый распространенный, лучше освоен технологически. В качестве исходного материала используют одно- или двухсторонние фольгированные диэлектрики (в основном фольгированные медью).
Рисунок печатного проводника наносится на фольгированную основу в виде защитной резистивной пленки, а непокрытые резистом места удаляются с помощью травления.
Аддитивные методы (от лат. «прибавлять»)
При этом методе исходным является нефольгированный диэлектрик, на поверхность которого наносится желаемый рисунок печатной платы.
Преимущества аддитивного метода по сравнению с субтрактивным:
- более высокая надежность, так как проводники и металлизация отверстий получаются в едином гальваническом цикле;
- однородность соединений между проводниками и металлизацией отверстий;
- отсутствие подтравливания;
- отсутствие гальванического защитного покрытия при травлении;
- экономия меди и химикатов;
- упрощение технологического процесса.
Существуют два основных варианта аддитивного метода получения ПП:
- химический;
- химико-гальванический.
При химическом методе слои получают на основе восстановительного соединения, при этом слои получаются до 10 мкм при удовлетворительных механических и физических свойствах покрытия. Недостатки – высокая стоимость изделий (в 3-4 раза дороже, чем при гальваническом осаждении) и низкая скорость осаждения.
Чтобы устранить недостатки химического метода часто обращаются к комбинированным методам (химико-гальванический метод). При этом на поверхности нефольгированного диэлектрика сначала химически получают связанный с подложкой слой меди толщиной до 5 мкм, который при последующем селективном гальваническом наращивании служит рисунком печатных проводников, а по окончании наращивания вытравливается, где это необходимо. Недостаток метода – неравномерная толщина покрытия в отверстиях из-за неравномерного распределения плотности тока гальванических ванн и возникновение переходной зоны между химически восстановленной и гальванически осажденной медью.
Чаще всего ОПП изготавливают субтрактивным химическим методом, который реализуется в двух вариантах:
- негативном;
-позитивном.
 В обоих методах используют односторонне фольгированный диэлектрик, на который после тщательной зачистки медной поверхности наносится, на основе фоторезистов, позитивный или негативный рисунок печатной платы.
В обоих методах используют односторонне фольгированный диэлектрик, на который после тщательной зачистки медной поверхности наносится, на основе фоторезистов, позитивный или негативный рисунок печатной платы.
Позитивный метод
При данном методе непокрытые защитным слоем - рельефом участки медной фольги удаляются травлением.
 Трафаретная печать:
Трафаретная печать:
Резистивное покрытие, устойчивое к травлению, переносится на фольгу через сетчатый трафарет. Толщина слоя резиста 10-30 мкм. Недостаток – невысокая точность выполнения рисунка.
Метод фотопечати:
 Поверхность фольгированного диэлектрика покрывают позитивным светочувствительным или негативным фоторезистом, на который копируют рисунок расположения проводников. Метод фотопечати по отношению ко всем другим методам создания защитных рельефов обеспечивает самую высокую точность, а также лучшую четкость и резкость контуров.
Поверхность фольгированного диэлектрика покрывают позитивным светочувствительным или негативным фоторезистом, на который копируют рисунок расположения проводников. Метод фотопечати по отношению ко всем другим методам создания защитных рельефов обеспечивает самую высокую точность, а также лучшую четкость и резкость контуров.
Метод офсетной печати:
Используется редко и в основном для больших серий, так как используется дорогостоящее оборудование. Достигаемое качество и точность рисунка ПП ниже, чем при методе фотопечати.
Негативный вариант химического способа
После создания защитного рельефа производится гальваническое покрытие едных поверхностей, незащищенных фоторезистом. Точность получения рисунка выше при данном методе, но он дороже.
Методы изготовления ДПП

В основе технологии изготовления ДПП с переходными соединениями методом травления фольги (субтрактивный метод) лежат те же процессы, что и при изготовлении ОПП, дополненные созданием переходных соединений.
Для электрического соединения рисунков проводников ДПП применяют металлизацию отверстий. Ее получают комбинированным химико-гальваническим методом.
Особенности технологии:
1. Материал заготовки – двухсторонний фольгированный стеклотекстолит с толщиной фольги 8,12,35,50 мкм.
2. Получение отверстий
Получают только сверлением, так как пробивка разрушает структуру диэлектрика на стенках отверстий, а сверление обеспечивает чистые и гладкие стенки, которые являются основой для получения качественного покрытия.
3. Сенсибилизация проводится в растворе двухлористого олова, а активация – в растворе хлористого палладия. В результате на поверхность диэлектрика внедряются атомы палладия – это подготовка к химическому осаждению.
4. 
 Химическое меднение. Толщина слоя при химическом меднении получается 1-5 мкм. При нанесении, чем тоньше слой, тем выше производительность (1 мкм в час) и тем качественнее покрытие. Пленка меди, получаемая при химическом осаждении – рыхлая, с плохой проводимостью и, поэтому, неравномерна по толщине.
Химическое меднение. Толщина слоя при химическом меднении получается 1-5 мкм. При нанесении, чем тоньше слой, тем выше производительность (1 мкм в час) и тем качественнее покрытие. Пленка меди, получаемая при химическом осаждении – рыхлая, с плохой проводимостью и, поэтому, неравномерна по толщине.
5. Создание защитного рельефа. Способ получения – трафаретная печать, фотопечать (как и ОПП).
Остальные операции аналогичны производству ОПП.
2.3 Оформление конструкторской документации
2.3.1 Нормативные материалы
При выполнении схем следует руководствоваться стандартами седьмой группы ЕСКД: ГОСТ 2.701 – 84 Схемы. Виды и типы, ГОСТ 2.702 – 75 Правила выполнения электрических схем.
Схемы в зависимости от видов элементов и связей, входящих в состав изделия (установки), подразделяют на следующие виды и обозначаются буквами:
- электрические (Э);
- гидравлические (Г);
- пневматические (П);
- газовые (кроме пневматических) (Х);
- кинематические (К);
- вакуумные (В);
- оптические (Л);
- энергетические (Р);
- деления (Е);
- комбинированные (С).
Схемы в зависимости от основного назначения подразделяют на следующие типы и обозначаются цифрами:
- структурные (1);
- функциональные (2);
- принципиальные (полные) (3);
- соединений (монтажные) (4);
- подключения (5);
- общие (6);
- расположения (7);
- объединенные (0).
Вид и тип схемы определяют ее наименование и код. Код состоит из буквы, обозначающей вид схемы, и цифры, обозначающей ее тип. Например, схема электрическая (Э) принципиальная (3) – Э3; схема гидравлическая (Г) соединений (4) - Г4; схема деления структурная – Е1; схема электрогидравлическая принципиальная – С3; схема электрогидропневмокинематическая принципиальная – С3; схема электрическая соединений и подключения – Э0; схема гидравлическая структурная, принципиальная и соединений – Г0.
Код схемы добавляется к обозначению чертежа в его конце. Например, ДП………..Э3.
Допускается разрабатывать схемы совмещенные, когда на схемах одного типа помещают сведения, характерные для схемы другого типа, например, на схеме соединений изделия (установки) показывают его внешние подключения.
При выполнении схем совмещенных должны быть соблюдены правила, установленные для схем соответствующих типов.
Схемы выполняют без соблюдения масштаба, действительное пространственное расположение составных частей изделия (установки) не учитывают или учитывают приближенно.
Расстояние (просвет) между двумя соседними линиями графического обозначения должно быть не менее 1,0 мм.
Расстояние между соседними параллельными линиями связи должно быть не менее 3,0 мм.
Расстояние между отдельными условными графическими обозначениями должно быть не менее 2,0 мм.
2.3.2 Графические обозначения схем
При выполнении схем применяют следующие графические обозначения:
- условные графические обозначения, установленные в стандартах ЕСКД, а
также построенные на их основе;
- прямоугольники;
- упрощенные внешние очертания (в том числе аксонометрические).
При необходимости применяют нестандартизованные условные графические обозначения.
При применении нестандартизованных условных графических обозначений и упрощенных внешних очертаний на схеме приводят соответствующие пояснения.
Перечень элементов помещают на первом листе схемы или выполняют в виде самостоятельного документа.
Перечень элементов оформляют в виде таблицы произвольной формы, заполняемой сверху вниз.
2.3.3 Назначение схем
2.3.3.1 Схема структурная – схема, определяющая основные функциональные части изделия, их назначение и взаимосвязи.
Схемы структурные разрабатывают при проектировании изделий на стадиях, предшествующих разработке схем других типов, и пользуются ими для общего ознакомления с изделием.
2.3.3.2 Схема функциональная – схема, разъясняющая определенные процессы, протекающие в отдельных функциональных цепях изделия или в изделии в целом.
Схемами функциональными пользуются для изучения принципов работы изделий, а также при их наладке, контроле и ремонте.
2.3.3.3 Схема принципиальная – схема, определяющая полный состав элементов и связей между ними, как правило, дающая детальное представление о принципах работы изделия.
Схемами принципиальными пользуются для изучения принципов работы изделий, а также при их наладке, контроле и ремонте. Они служат основанием для разработки других конструкторских документов, например, схем соединений и чертежей.
2.3.4 Правила выполнения структурных схем
Функциональные части на структурной схеме изображают в виде прямоугольника или условных графических обозначений.
На линиях взаимосвязей рекомендуется стрелками обозначать направление хода процессов, происходящих в изделии.
На схеме должны быть указаны наименования каждой функциональной части изделия, если для ее обозначения применен прямоугольник.
При изображении функциональных частей в виде прямоугольников наименования, типы и обозначения рекомендуется вписывать внутрь прямоугольников.
При большом количестве функциональных частей допускается взамен наименований, типов и обозначений проставлять порядковые номера справа от изображения или над ним, как правило, сверху вниз в направлении слева направо. В этом случае наименования, типы и обозначения указывают в таблице, помещаемой на поле схемы.
2.3.5 Правила выполнения функциональных схем
Функциональные части и связи между ними на схеме изображают в виде условных графических обозначений, установленных в стандартах ЕСКД. Отдельные функциональные части допускается изображать в виде прямоугольников.
На схеме должны быть указаны:
- для каждой функциональной группы – обозначение, присвоенное ей на принципиальной схеме, и (или) ее наименование; если функциональная группа изображена в виде условного графического обозначения, то ее наименование не указывают;
- для каждого устройства, изображенного в виде прямоугольника,–позиционное обозначение, присвоенное ему на принципиальной схеме, его наименование и тип;
- для каждого устройства, изображенного в виде условного графического обозначения, – позиционное обозначение, присвоенное ему на принципиальной схеме, его тип;
- для каждого элемента – позиционное обозначение, присвоенное ему на принципиальной схеме, и (или) его тип.
Наименования, типы и обозначения рекомендуется вписывать в прямоугольники.
2.3.6 Правила выполнения принципиальных схем
На принципиальной схеме изображают все электрические элементы или устройства, необходимые для осуществления и контроля в изделии заданных электрических процессов, все электрические связи между ними, а также
электрические элементы (соединители, зажимы и т.п.), которыми заканчиваются входные и выходные цепи.
Элементы и устройства, условные графические обозначения которых установлены в стандартах ЕСКД, изображают на схеме в виде этих условных графических обозначений.
Каждый элемент и (или) устройство, имеющее самостоятельную принципиальную схему и рассматриваемое как элемент, входящие в изделие и изображенные на схеме, должны иметь обозначение (позиционное обозначение) в соответствии с ГОСТ 2.721-74.
Устройствам, не имеющим самостоятельных принципиальных схем, и функциональным группам рекомендуется присваивать обозначения в соответствии с ГОСТ 2.710-81.
Пример оформления электрической принципиальной схемы приведен в приложении Х.
Все сведения об элементах, входящих в состав изделия и изображенных на схеме, записывают в перечень элементов, который оформляют в виде таблицы, заполняемой сверху вниз.
Перечень располагают над основной надписью чертежа на расстоянии не менее 12 мм от нее. Если на чертеже схемы не хватает места для перечня, то его выполняют на формате А4 с присвоением шифра, состоящего из буквы П (перечень) и кода схемы, к которой выпускается перечень. Например, ПЭ3 – перечень элементов к принципиальной электрической схеме.
Элементы записывают в перечень группами в алфавитном порядке буквенных позиционных обозначений. В пределах каждой группы элементы записывают по возрастанию порядковых номеров элементов.
2.3.7 Сборочный чертеж
2.3.7.1 Сборочный чертеж служит для рациональной организации производства (сборки и контроля) изделий. Требования к сборочному чертежу регламентированы ГОСТ 2.109 – 73. Прототипом для выполнения сборочного чертежа служит чертеж общего вида изделия.
2.4.7.2 Сборочный чертеж должен содержать:
а) изображение сборочной единицы, дающее представление о расположении и взаимной связи составных частей, соединяемых по данному чертежу, и обеспечивающее возможность осуществления сборки и контроля сборочной единицы;
б) размеры, предельные отклонения и другие параметры и требования, которые должны быть выполнены или проконтролированы по данному чертежу;
допускается указывать в качестве справочных размеры деталей, определяющие характер сопряжения;
в) указания о характере сопряжения и методах его осуществления, если точность сопряжения обеспечивается подбором, пригонкой и т.п., а также указания о выполнении неразъемных соединений (сварных, паяных и др.);
д) номера позиций составных частей, входящих в изделие;
е) габаритные размеры изделия;
ж) установочные, присоединительные и другие необходимые справочные размеры;
и) техническую характеристику изделия (при необходимости);
к) координаты центра масс (при необходимости).
2.3.7.3 Установочные и присоединительные размеры должны даваться с предельными отклонениями размеров элементов, служащих для соединения с сопрягаемыми деталями.
2.3.7.4 Сборочные чертежи следует выполнять, как правило, с упрощениями, соответствующими требованиям стандартов ЕСКД и ГОСТ 2.109 – 73.
В обозначении сборочного чертежа добавляется код СБ.
На сборочном чертеже над основной надписью помещают технические требования, пример которых приведен ниже.
1. Размеры для справок.
2. Установку компонентов позиций 2, 3, 4 производить по ОСТ4 010.030-81, вариант II в; компонентов позиций 5, 6, 7 по чертежу и табл. 1, 2, 3.
3. Топология платы позиции 1 условно не показана.
4. Обозначения компонентов, выходных контактов и геометрических центров установки компонентов показаны условно. Обозначения компонентов и выходных контактов соответствует ИГТУ.421000.001Э3.
5. Припой ПОС61 ГОСТ 21930-76.
6. Покрытие – лак ЭП-730 ГОСТ 20824-81, кроме разъемов.
7. Остальные технические требования по ОСТ4 ГО.070.015.
2.3.8 Спецификация
2.3.8.1 Спецификация является основным конструкторским документом для сборочной единицы и составляется на отдельных листах формата А4. Форма и порядок заполнения спецификации регламентированы ГОСТ 2.106 – 96, раздел 3.
2.3.8.2 В чертежах выпускных и курсовых проектов (работ) допускается размещать спецификацию на одном листе со сборочным чертежом над основной надписью.
2.3.8.3 Спецификация в общем виде состоит из разделов, которые располагаются в следующей последовательности:
- документация (сборочный чертеж, принципиальная электрическая схема, технические условия и др.);
- комплексы;
- сборочные единицы;
- детали;
- стандартные изделия (изготовленные согласно требованиям государствен- ных, республиканских или отраслевых стандартов);
- прочие изделия (изготовленные по техническим условиям);
- материалы (пластмассы, провода и др.);
- комплекты (комплекты сменных и запасных частей, инструмента и т.д.).
3 Примерные темы курсовых работ
Типовой темой курсовой работы является разработка усилителя мощности для управления электрическими двигателями механизмов робототехнических систем.
1. Разработка усилителя мощности для микропроцессорного устройства управления двигателем постоянного тока на биполярных транзисторах.
2. Разработка усилителя мощности для микропроцессорного устройства управления шаговым двигателем на IGBT транзисторах.
3. Разработка усилителя мощности для микропроцессорного устройства управления двигателем постоянного тока на полевых транзисторах.
4. Разработка усилителя мощности для микропроцессорного устройства управления шаговым двигателем на полевых транзисторах.
4 Перечень вопросов на защиту курсовой работы
1. Режимы насыщения и отсечки биполярного транзистора.
2. Ключ на биполярном транзисторе.
3. Силовой ключ на биполярном транзисторе.
4. Процесс открывания биполярного транзистора.
5. Процесс закрывания биполярного транзистора.
6. Способы повышения надежности и быстродействия ключа на биполярном транзисторе.
7. Цепи формирования траектории рабочей точки биполярного транзистора.
8. Составные биполярные транзисторы.
9. Оптопары.
10. Полевые транзисторы. Их характеристики.
11. Динамические характеристики полевых транзисторов.
12. Силовые ключи на полевых транзисторах.
13. Комбинационные логические схемы.
14. Последовательные логические схемы.
15. Классы точности печатного рисунка.
16. Методы изготовления ПП.
17. Технологии изготовления ПП.
Рекомендуемая литература
а) основная литература
1.Грачев А.А., Мельник А.А., Панов Л.И. Конструирование электронной аппаратуры на основе поверхностного монтажа компонентов. – М.: НТ Пресс, 2006. – 384 с.
2.Кузнецов Б.Ф. Электронные промышленные устройства: Учебное пособие [Электронный ресурс]. - Изд-во: Ангарской государственной технической академии, 2010. - 151 с. ISBN/ISSN:978-5-89864-072-9 // Единое окно доступа к информационным ресурсам. URL:http://window.edu.ru/resource/335/73335 (дата обращения: 11.07.2014).
3.Кулик В.Д. Силовая электроника. Автономные инверторы, активные преобразователи: Учебное пособие [Электронный ресурс]. - СПб.: СПбГТУРП, 2010. - 90 с. // Единое окно доступа к информационным ресурсам. URL: http://window.edu.ru/resource/330/76330 (дата обращения: 11.07.2014).
4.Муромцев Д.Ю. Основы проектирования электронных средств: учебное пособие [Электронный ресурс] / Д.Ю. Муромцев, И.В. Тюрин. - Тамбов: Изд-во ГОУ ВПО ТГТУ, 2011. - Ч. 1. - 80 с. ISBN/ISSN:978-5-8265-0980-7 // Единое окно доступа к информационным ресурсам. URL:http://window.edu.ru/resource/512/76512 (дата обращения: 11.07.2014).
б) дополнительная литература
1. Афанасьева Н.А., Булат Л.П. Электротехника и электроника: Учебное пособие [Электронный ресурс]. - 2-е изд., перераб. и дополн. - СПб.: СПбГУНиПТ, 2009. - 181 с. ISBN/ISSN:5-89565-117-8// Единое окно доступа к информационным ресурсам. URL: http://window.edu.ru/resource/926/77926 (дата обращения: 11.07.2014).
2. Гаврилов С. А. Искусство схемотехники. Просто о сложном. – СПб.: Наука и Техника, 2011. – 352 с.
3. Майер Р.В. Основы электроники. Курс лекций: Учебно-методическое пособие. – Глазов: ГГПИ, 2011. – 80 с.
в) ГОСТы и ОСТы
1. ГОСТ Р 50621-93 (МЭК 326-4-80). Платы печатные одно- и двусторонние с неметаллизированными отверстиями. Общие технические требования.
2. ГОСТ 23751-86. Платы печатные. Параметры конструкции.
3. ГОСТ 10317-79. Платы печатные. Основные размеры.
4. ГОСТ 2.104 Основные надписи
5. ГОСТ 2.105 Общие требования к текстовым документам
6. ГОСТ 2.106 Текстовые документы
7. ГОСТ 2.108 Спецификация
8. ГОСТ 2.115 Технические условия
9. ГОСТ 2.118 Технические предложения
10. ГОСТ 2.120 Технический проект
11. ГОСТ 2.417 Правила выполнения чертежей
12. ГОСТ 2.701 Схемы. Типы и виды. Общие правила выполнения чертежей
13. ГОСТ 2.702 Правила выполнения электрических схем
14. ГОСТ 2.705 Правила выполнения электрических схем обмоток
15. ГОСТ 2.710 Обозначения условные буквенно-цифровые
16. ОСТ4.ГО.000.048 Платы печатные комплектность документации
17. ОСТ4.ГО.010.011 Платы печатные. Конструирование
18. ОСТ4.ГО.010.030 Установка элементов на печатные платы
Приложение А
(обязательное)
Варианты заданий на курсовую работу
| № варианта | Тема | Двигатель | Микроконтроллер | Примечания |
| 1. | Разработка усилителя мощности для микропроцессорного устройства управления двигателем постоянного тока на биполярных транзисторах. | ДПМ-25 | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 2. | Разработка усилителя мощности для микропроцессорного устройства управления шаговым двигателем на полевых транзисторах. | ДШР 39-0,006-1,8 | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 3. | Разработка усилителя мощности для микропроцессорного устройства управления вентильным двигателем на IGBT транзисторах. | ВДМ-0.6-110 | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 4. | Разработка усилителя мощности для микропроцессорного устройства управления шаговым двигателем на полевых транзисторах. | AD-200 | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 5. | Разработка усилителя мощности для микропроцессорного устройства управления двигателем постоянного тока на биполярных транзисторах. | ДПМ-35 | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 6. | Разработка усилителя мощности для микропроцессорного устройства управления вентильным двигателем на IGBT транзисторах. | ВДМ-5-180 | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 7. | Разработка усилителя мощности для микропроцессорного устройства управления двигателем постоянного тока на биполярных транзисторах. | ДПМ-30 | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 8. | Разработка усилителя мощности для микропроцессорного устройства управления шаговым двигателем на полевых транзисторах. | FL110STH | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 9. | Разработка усилителя мощности для микропроцессорного устройства управления вентильным двигателем на IGBT транзисторах. | ВДМ-5-240 | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 10. | Разработка усилителя мощности для микропроцессорного устройства управления шаговым двигателем на биполярных транзисторах. | FL86STH | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 11. | Разработка усилителя мощности для микропроцессорного устройства управления двигателем постоянного тока на полевых транзисторах. | МУ-431 | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 12. | Разработка усилителя мощности для микропроцессорного устройства управления вентильным двигателем на IGBT транзисторах. | ВДМ-3-148 | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 13. | Разработка усилителя мощности для микропроцессорного устройства управления двигателем постоянного тока на биполярных транзисторах. | КПА-563 | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 14. | Разработка усилителя мощности для микропроцессорного устройства управления шаговым двигателем на IGBT транзисторах. | ДШР 39-0,006-1,8 | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 15. | Разработка усилителя мощности для микропроцессорного устройства управления вентильным двигателем на полевых транзисторах. | ВДМ-1.0-110 | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 16. | Разработка усилителя мощности для микропроцессорного устройства управления шаговым двигателем на полевых транзисторах. | ДШР 39-0,006-1,8 | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 17. | Разработка усилителя мощности для микропроцессорного устройства управления двигателем постоянного тока на биполярных транзисторах. | КПА-561 | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 18. | Разработка усилителя мощности для микропроцессорного устройства управления вентильным двигателем на IGBT транзисторах. | ВДМ-8-185 | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 19. | Разработка усилителя мощности для микропроцессорного устройства управления двигателем постоянного тока на полевых транзисторах. | КПА-563 | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 20. | Разработка усилителя мощности для микропроцессорного устройства управления шаговым двигателем на IGBT транзисторах. | FL42STH | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 21. | Разработка усилителя мощности для микропроцессорного устройства управления вентильным двигателем на биполярных транзисторах. | ВДМ-35-324 | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 22. | Разработка усилителя мощности для микропроцессорного устройства управления шаговым двигателем на IGBT транзисторах. | FL35ST | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 23. | Разработка усилителя мощности для микропроцессорного устройства управления двигателем постоянного тока на биполярных транзисторах. | ПЛ-062 | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 24. | Разработка усилителя мощности для микропроцессорного устройства управления вентильным двигателем на полевых транзисторах. | ВДМ-3-148 | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 25. | Разработка усилителя мощности для микропроцессорного устройства управления двигателем постоянного тока на IGBT транзисторах. | ПЛ-072 | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 26. | Разработка усилителя мощности для микропроцессорного устройства управления шаговым двигателем на полевых транзисторах. | FL20STH | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 27. | Разработка усилителя мощности для микропроцессорного устройства управления вентильным двигателем на биполярных транзисторах. | ВДМ-10-240 | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 28. | Разработка усилителя мощности для микропроцессорного устройства управления шаговым двигателем на IGBT транзисторах. | FL28STH | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 29. | Разработка усилителя мощности для микропроцессорного устройства управления двигателем постоянного тока на биполярных транзисторах. | ДПМ-25 | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
| 30. | Разработка усилителя мощности для микропроцессорного устройства управления шаговым двигателем на полевых транзисторах. | ДШР 39-0,006-1,8 | MSP430G2553 | Наличие гальванической развязки, реверсивный режим работы двигателя |
Приложение Б
(обязательное)
Варианты заданий двигателей
Дисковая серия
|




Серия двигателей с полым ротором
Система управления приводами - силовые коммутаторы CVD-100 фирмы ArtLaser, вход управления CAN, силовое питание 160 В постоянного тока. Защиты 1) по концевым датчикам 2) по программным упорам 3) по току 4) по температуре 5) по превышению величины ошибки регулирования. Функция автоматического базирования. | ||||||||||||||||||||||||||||||||||||||||||||



Cерия встраиваемых электродвигателей
Встраиваемая серия разработана для сборки привода непосредственно на валу исполнительного устройства. Позволяет экономить вес и стоимость конечного изделия.
| ||||||||||||||||||||


|
Шаговые двигатели AD-200
 Шаговые двигатели серии AD-200 являются надежными и качественными шаговыми двигателями для широкого круга применений. Предлагаемые модели: шаговый двигатель AD-200-21 (AD-200-22) и AD-200-31 (AD-200-32). Реализованные на базе шаговых двигателей AD-200 приводы имеют высокую точность позиционирования и надежность.
Шаговые двигатели серии AD-200 являются надежными и качественными шаговыми двигателями для широкого круга применений. Предлагаемые модели: шаговый двигатель AD-200-21 (AD-200-22) и AD-200-31 (AD-200-32). Реализованные на базе шаговых двигателей AD-200 приводы имеют высокую точность позиционирования и надежность.
Шаговые двигатели серии AD -200 с максимальным током фазы 2,8А и максимальным крутящим моментом 31 кг*см используются в упаковочном оборудовании, робототехнике, рекламном оборудовании, в приборостроении, устанавливаются в станках с ЧПУ и пр. устройствах, приборах, аппаратах и механизмах, в которых на электропривод возлагается задача быстрого и точного позиционирования. Основной угловой шаг - 1,8 ° .
| Модель | Схема включения | Ток фазы, А | Сопротивление фазы, Ом | Индуктивность, мГн | Крутящий момент, кг•см | Момент инерции ротора, г•см2 | Вес, кг | Длина, мм |
| AD-200-21 (вал в 1 сторону) AD-200-22 (вал в 2 стороны) | Рис.1 | 2 | 2,4 | 4,6 | 15 | 570 | 1,2 | 67 |
| Рис.2 | 2,8 | 1,2 | 4,6 | 21 | ||||
| Рис.3 | 1,4 | 4,8 | 18,4 | 21 |
Габаритные и присоединительные размеры двигателей AD-200-21 и AD-200-22

Габаритные и присоединительные размеры шаговых двигателей AD-200-31 и AD-200-32
Электрическая схема шаговых двигателей AD-200
|  схема 1
схема 1
|  схема 2
схема 2
|  схема 3
схема 3
|
Приложение В
(справочное)
Сайты с характеристиками шаговых двигателей и двигателей постоянного тока
http://www.eprivod.ru/ad-200.htm
http://www.eprivod.ru/fl110sth.htm
http://www.eprivod.ru/fl86sth.htm
http://www.eprivod.ru/fl42sth.htm
http://www.eprivod.ru/fl39st.htm
http://www.eprivod.ru/fl28sth.htm
http://www.xn----7sbfedebebzdrkbi5bmwkezhiw8r1a.xn--p1ai/product/elektrodvigatel-mu-431-1/
http://www.xn----7sbfedebebzdrkbi5bmwkezhiw8r1a.xn--p1ai/product/elektrodvigatel-kpa-563-u2-im3001-3/
http://www.xn----7sbfedebebzdrkbi5bmwkezhiw8r1a.xn--p1ai/product/elektrodvigatel-kpa-561-u2-im3001-2/
http://www.xn----7sbfedebebzdrkbi5bmwkezhiw8r1a.xn--p1ai/product/elektrodvigatel-kpa-632-u2-im3001-4/
http://www.xn----7sbfedebebzdrkbi5bmwkezhiw8r1a.xn--p1ai/product/elektrodvigatel-pl-062-uhl4-im3681-6/
http://www.xn----7sbfedebebzdrkbi5bmwkezhiw8r1a.xn--p1ai/product/elektrodvigatel-pl-072-u3-im1001-10/
Приложение Г
(справочное)
Характеристики шагового двигателя ДШР 39-0,006-1,8
Маломощный шаговый двигатель ДШР 39-0,006-1,8 УХЛ4 показан на рисунке Г.1.

Рисунок Г.1 – Фотография шагового двигателя ДШР 39-0,006-1,8 УХЛ4
Номинальное напряжение на входе блока управления двигателем +12V.
На рисунке Г.2 представлена схема соединения обмоток шагового электродвигателя ДШР 39-0,006-1,8 УХЛ4.

РисунокГ.2 – Схема соединения обмоток шагового электродвигателя ДШР 39-0,006-1,8 УХЛ4
На рисунке Г.3 представлен порядок чередования управляющих импульсов шагового электродвигателя ДШР 39-0,006-1,8 УХЛ4

Рисунок Г.3 – Порядок чередования управляющих импульсов шагового электродвигателя ДШР 39-0,006-1,8 УХЛ4.
Приложение Д
(справочное)
Пример схемы электрической принципиальной

Приложение Е
(справочное)
Пример перечня элементов

Приложение Ж
(справочное)
Пример платы печатной

Приложение И
(справочное)
Пример сборочного чертежа

Приложение К
(справочное)
Пример спецификации

Приложение Л
(справочное)
Наиболее часто встречающиеся отклонения от ЕСКД
Старайтесь избегать следующих отклонений от ЕСКД при оформлении ПЗ и чертежей. Соблюдайте размеры и принятые условные обозначения элементов на принципиальных схемах; все элементы, а также их выходы и входы должны быть обозначены. На листе чертежа или в приложении к ПЗ должны быть перечни элементов. Надписи в штампе должны быть грамотными и отражать содержание чертежа, правильно кодируйте чертежи. Тройную рубрикацию подразделов (например, 3.3.2) можно использовать в тексте ПЗ; но не в содержании. Ссылки на источники информации необходимо нумеровать в порядке их появления и правильно оформлять. На чертежи следует выносить только те схемы, узлы, детали, которые студент сам спроектировал или модернизировал (например, можно дать чертеж известной конструкции машины, в которой студент заменил редуктор, размеры отдельных элементов, привод и т.п.). В русском тексте целая часть числа должна отделяться от дробной запятой, а не точкой; знак умножения – точка посередине высоты символов («∙»), а не звездочка (в тексте программы - другое дело). Каждое предложение (кроме заголовков) должно оканчиваться точкой. Внутри предложения все слова (кроме имен собственных) пишутся со строчной буквы (в том числе и при перечислении, когда каждый элемент перечисления располагается на новой строке и оканчивается запятой или точкой с запятой). При перечислении значений параметров (в тексте или в таблице) единица измерения пишется через запятую после наименования параметра, а не после его численного значения: «напряжение питания, В 220, КПД, % 80».
В тексте единицы измерения отделяются от числа пробелом (коме процентов и градусов, например: 24 кОм, 220 В, 35%, 60°С). Следует использовать верхние и нижние индексы там, где это необходимо (Nном, R1, а не Nном, R1; если написано fв, то непонятно, что это – f∙в, или fв). Следует давать ссылки на источники, из которых взята информация о выбираемых элементах, узлах, устройствах, а также используемые расчетные формулы (кроме общеизвестных). Нумеруются только те формулы, на которые впоследствии даются ссылки (нумерация формул, как и рисунков, производится в пределах каждого раздела: 2.1, 2.2 и т.д.). Если формулой оканчивается предложение, после формулы ставится точка; если за ней следуют другие формулы или пояснения (например, «где ω=2πf=30 рад/сек – круговая частота вращения ротора»), то запятая. Употребление сокращений. При первом упоминании название сокращаемого понятия или объекта пишется полностью, после чего в скобках приводится сокращение прописными буквами: выходное механическое звено (ВМЗ). Без пояснений можно использовать только общеупотребительные сокращения (например, КПД) Не следует злоупотреблять количеством введенных сокращений (достаточно 3-5 сокращений). В содержании и заголовках сокращения не используются. Все абзацы должны начинаться с красной строки. Пробелы ставятся после знаков препинания, а не перед ними. Между скобками и словами также пробелы не делаются.
Дата добавления: 2018-04-05; просмотров: 1129; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!