Лабораторная работа № 2. Встречно-параллельное соединение звеньев
Цель работы
Выяснить причины возникновения перерегулирования и колебаний в замкнутых системах автоматического регулирования при ступенчатом входном воздействии. Установить зависимости перерегулирования от инерционности обратной связи.
Задание к работе
k1 = 3, k2 = 1 для всех вариантов
| Вариант | Т1, c | Т2, c | Т3, c |
| 1 – 1 1 – 2 1 – 3 | 0,104 0,104 0,156 | 0,10 0,40 0,10 | 1,540 0,088 0,176 |
| 2 – 1 2 – 2 2 – 3 | 0,412 0,812 0,412 | 0,025 0,025 0,100 | 1,540 0,088 0,176 |
| 3 – 1 3 – 2 3 – 3 | 0,208 0,812 0,208 | 0,05 0,05 0,05 | 1,540 0,088 0,176 |
| 4 – 1 4 – 2 4 – 3 | 0,208 0,812 0,412 | 0,05 0,10 0,05 | 0,740 0,176 0,264 |
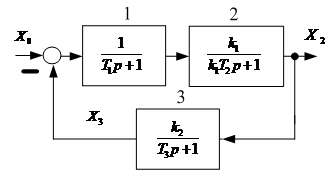
Рис. 5. Структурная схема и параметры САУ к лабораторной работе № 2
Программа самостоятельной работы
1. По заданным параметрам своего варианта (рис. 5) построить точные ЛАЧХ и ЛФЧХ САУ.
2. По результирующей ЛАЧХ построить переходную функцию и определить основные показатели регулирования.
3. Данные расчётов свести в таблицу рис. 4.
Программа работы в лаборатории
1. Собрать исследуемую систему на наборном поле.
2. На экране компьютера снять и построить переходные процессы при единичном ступенчатом входном воздействии, определить показатели этих процессов и занести их в таблицы рис. 4 (см. п. 1.2.2).
3. По кривым переходного процесса своего варианта и двух других вариантов своей бригады оценить влияние постоянной времени цепи ОС на характер переходного процесса в САУ.
Методические указания к лабораторной работе № 2
|
|
|
Исследуемая система (рис. 5) состоит из трёх апериодических звеньев, входящих в прямой канал (звенья 1 и 2) и в обратную связь (звено 3). Характерной особенностью таких систем является склонность их к перерегулированию и колебаниям. При определённом сочетании параметров в подобных системах могут возникнуть незатухающие или расходящиеся колебания, т. е. система может стать неустойчивой.
Для построения результирующей ЛЧХ встречно-параллельно соединённых звеньев можно воспользоваться следующей методикой.
Пусть имеются встречно-параллельно соединённые звенья с передаточной функцией прямого канала W1(p) и передаточной функцией W2(p) канала ОС (рис. 6 а). Таким образом, известны АФЧХ прямого канала  и соответственно ЛЧХ –
и соответственно ЛЧХ –  и
и  . АФЧХ канала обратной связи
. АФЧХ канала обратной связи  и соответственно ЛЧХ –
и соответственно ЛЧХ –  и
и  .
.
Понятие обратных частотных характеристик звена обратной связи следующее:
– обратная АЧХ 
– обратная ФЧХ 
– обратная ЛАЧХ 
Таким образом, обратные ЛЧХ являются зеркальным отображением прямых ЛЧХ относительно оси абсцисс (оси lgw).
Известно, что передаточная функция встречно-параллельного соединения звеньев с ООС определяется соотношением
|
|
|
 , (2.1)
, (2.1)
для частотных характеристик
 . (2.2)
. (2.2)
В общем случае в некоторой области частот может соблюдаться соотношение  , или
, или  , т. е. лежит ниже
, т. е. лежит ниже  .
.
Тогда уравнение (2.2) можно представить в виде
 . (2.3)
. (2.3)
Очевидно, что в знаменателе дроби стоит выражение, мало отличающееся от единицы. В оставшейся области частот  , или
, или  , т. е. лежит ниже .
, т. е. лежит ниже .
Тогда, представив уравнение (2.2) в виде
 , (2.4)
, (2.4)
можно снова отметить, что в знаменателе дроби стоит выражение, мало отличающееся от единицы.
Таким образом, результирующая АФЧХ встречно-параллельно соединённых звеньев с ООС идёт по АФЧХ прямого канала в области частот, где  и по обратной АФЧХ канала ОС в области частот, где
и по обратной АФЧХ канала ОС в области частот, где  с учётом поправочного коэффициента, равного в первом случае
с учётом поправочного коэффициента, равного в первом случае
 и
и  (2.5)
(2.5)
во втором.
Переходя к ЛЧХ, последнее можно сформулировать следующим образом.
Результирующая ЛЧХ встречно-параллельного соединенных звеньев с ООС идёт по ЛЧХ прямого канала в области частот, где лежит ниже , и по обратной ЛЧХ канала ОС в области частот, где лежит ниже , за вычетом координат поправок, т. е.

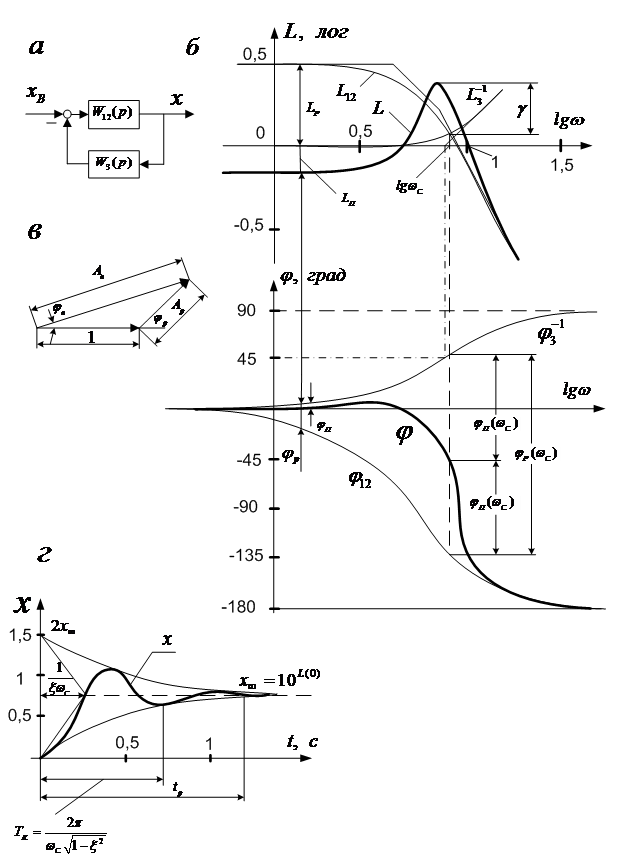 Рис. 6. Структурная схема (а), ЛЧХ (б), поправочный вектор (в)
Рис. 6. Структурная схема (а), ЛЧХ (б), поправочный вектор (в)
и переходная функция (г) САУ
|
|
|
Нахождение поправочного вектора
 , (2.6)
, (2.6)
иллюстрируется векторной диаграммой (рис. 6 в).
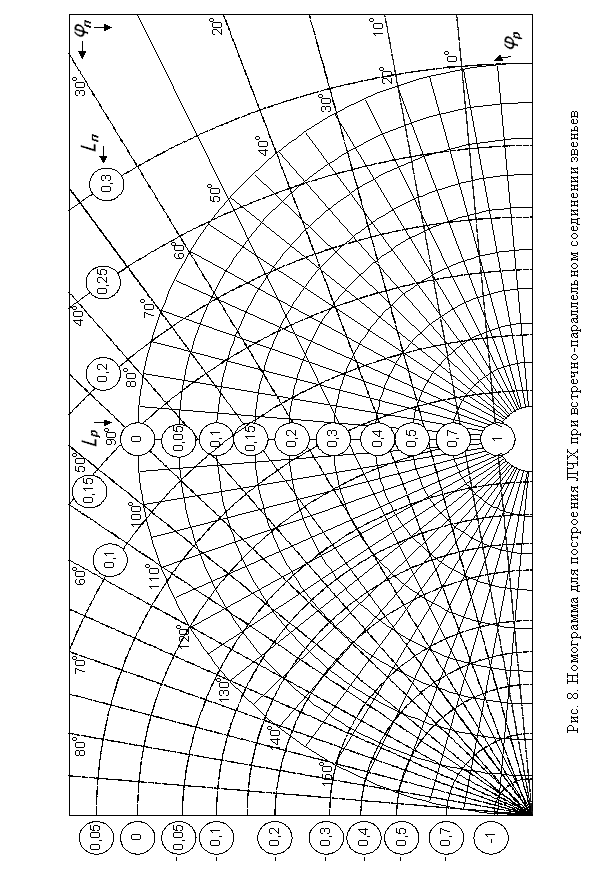
Для удобства нахождения поправочных координат на рис. 7 приведена номограмма, в которой вместо абсолютных значений амплитуд  и
и  , даны их логарифмы, т. е.
, даны их логарифмы, т. е.  и
и  .
.
Таким образом, для построения результирующей ЛЧХ встречно-параллельно соединённых звеньев (рис. 6 б) необходимо:
– построить  прямого канала и
прямого канала и  канала ОС;
канала ОС;
– задавшись частотой wi , определить  как расстояния между
как расстояния между  и
и  , а
, а  как расстояние между
как расстояние между  и
и  (рис. 6 б);
(рис. 6 б);
– по и в номограмме рис. 7 найти LП(wi) и jП(wi). Lp(w) отложены в кружках по центру номограммы; jр(w) – на концах лучей, исходящих из центра нижней линии номограммы; LП(w) – в кружках на окружностях с центром в левом нижнем углу; j П(w) – на концах лучей, исходящих из левого нижнего угла номограммы (рис. 7);
– значение LП(wi) отнимается от значения L12(wi) или L3(wi), лежащих ниже относительно друг друга, с учётом знака поправки, полученной по номограмме;
– значение jП(wi) откладывается от фазы звена, ЛАЧХ (или обратная ЛАЧХ) которого лежит ниже. jП(wi) откладывается всегда вовнутрь пространства, лежащего между j12(w) и j3-1(w);
|
|
|

– повторяя построение для других частот аналогично изложенному, находят координаты L(w) и j(w) результирующей ЛЧХ.
Наибольшие поправки будут в частоте пересечения  и
и  – частоте среза wС замкнутого контура. Действительно, при этой частоте
– частоте среза wС замкнутого контура. Действительно, при этой частоте  и величина поправки будет полностью определяться фазой
и величина поправки будет полностью определяться фазой  . При
. При  поправка будет 0,15 лог, что соответствует поправке аппроксимированного апериодического звена, т. е. в этом случае переходный процесс будет иметь апериодический характер, время регулирования составит примерно (3 – 4)/wC. При
поправка будет 0,15 лог, что соответствует поправке аппроксимированного апериодического звена, т. е. в этом случае переходный процесс будет иметь апериодический характер, время регулирования составит примерно (3 – 4)/wC. При  поправка в частоте wС равна нулю – процесс может иметь перерегулирование 18–25 % и колебательность
поправка в частоте wС равна нулю – процесс может иметь перерегулирование 18–25 % и колебательность
1–2 колебания.
В пределе при  система находится на грани устойчивости, и в ней возникают незатухающие колебания с частотой wС. Амплитуда поправки при этом равна нулю, а
система находится на грани устойчивости, и в ней возникают незатухающие колебания с частотой wС. Амплитуда поправки при этом равна нулю, а  , т. е. результирующая ЛАЧХ имеет бесконечное возрастание (разрыв) в частоте среза.
, т. е. результирующая ЛАЧХ имеет бесконечное возрастание (разрыв) в частоте среза.
Установившееся значение регулируемой величены определяется значением результирующей ЛАЧХ в области малых частот (при w = 0 в пределе), поэтому следует обратить внимание на определение поправок в области низких частот. Если учесть, что  , то правильность нахождения поправок при w = 0 можно проверить определением А(0), придавая в формуле (2.2) w = 0 (или полагая в формуле (2.1) р= 0).
, то правильность нахождения поправок при w = 0 можно проверить определением А(0), придавая в формуле (2.2) w = 0 (или полагая в формуле (2.1) р= 0).
В данной работе исследуется устойчивая система. При этом варианты для членов бригады подобраны так, что подъём результирующей ЛАХ в одном случае почти отсутствует, в другом варианте он в основном определяется инерционностью ОС, в третьем варианте он появляется в основном за счёт поправок. Первому случаю соответствует монотонный переходный процесс, второму – переходный процесс с большим перерегулированием, третьему – колебательный переходный процесс.
Переходный процесс в первых двух случаях может быть построен по методике, описанной в п. 2.1.3 (рис. 4). В третьем случае переходный процесс может быть построен, если САУ представить эквивалентным колебательным звеном второго порядка. При этом частота  (период ТК = 2p/wK) и постоянная затухания
(период ТК = 2p/wK) и постоянная затухания  зависят от коэффициента демпфирования x. По аналогии с колебательным звеном x может быть определён высотой g всплеска ЛАЧХ типа L (рис. 7, б), т. е.
зависят от коэффициента демпфирования x. По аналогии с колебательным звеном x может быть определён высотой g всплеска ЛАЧХ типа L (рис. 7, б), т. е.  . Построение приближённой кривой переходного процесса
. Построение приближённой кривой переходного процесса
(рис. 7 г) сводится к построению огибающих с подкасательной Тз и вписанных между огибающими колебаний X c периодом ТК.
Вопросы для самопроверки
1. Как построить результирующие ЛЧХ при встречно-параллельном соединении звеньев?
2. При каких условиях в замкнутой САУ возникают колебания выходной величины?
3. С помощью ЛЧХ пояснить влияние значения ТОС на качество переходного процесса.
Литература
[1, c. 110–123, 225–228];
[3, с. 82–88, 207–210, 255–259].
Дата добавления: 2018-04-04; просмотров: 818; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!