Задания для выполнения практической работы
Министерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение высшего образования
«Тюменский индустриальный университет»
Институт геологии и нефтегазодобычи
Кафедра кибернетических систем
МЕТОДЫ ИЗМЕРЕНИЙ И ПРИБОРЫ АВТОМАТИЗАЦИИ
методические указания и задания к практическим занятиям
по дисциплине «Основы автоматизации производственных процессов»
для студентов направлений
21.05.05 Физические процессы горного или нефтегазового производства
всех форм обучения
Составители
Д.В. Смирнов
Ассистент
В.И. Смирнов
Ассистент
Тюмень
ТИУ
2017
Методы измерений и приборы автоматизации Методические указания и задания к практическим занятиям [Текст]/ сост. Смирнов Д.В., Смирнов В.И. Тюменский индустриальный университет – Тюмень: Издательский центр БИК ТИУ 2017.– 31с.
Ответственный редактор В.В. Козлов, к.т.н, доцент
Методические указания рассмотрены и рекомендованы к изданию на заседании кафедры Кибернетических систем
« 9 » февраля 2017 года, протокол № 2.
Аннотация
Методические указания и задания к практическим занятиям по дисциплине «Основы автоматизации производственных процессов» предназначены для студентов, обучающихся по направлениям 21.05.05 Физические процессы горного или нефтегазового производства всех форм обучения.
|
|
|
Приведены основные сведения, необходимые для выполнения практической работы, требования к содержанию и оформлению работы.
Содержание
| Введение…………………...……………………………..………. | 4 |
| Назначение методических указаний...................……….………. | 4 |
| 1. Краткие сведения о методах измерения................................. | 5 |
| 1.1 Сущность и классификация измерений………..……….. | 5 |
| 1.2Методы измерений………………………………………... | 7 |
| 1.3Средства измерений………………………………………. | 9 |
| 1.4 Погрешности средств измерений………………………... | 15 |
| 1.5Методы повышения точности измерений……………….. | 21 |
| 2. Задания для выполнения практической работы……………. | 27 |
| 3. Программа выполнения практической работы и отчетность | 28 |
| 3.1 Программа выполнения работы…………………………. | 28 |
| 3.2 Отчетность по практической работе…………………….. | 28 |
| 4. Контрольные вопросы………………………………………… | 29 |
| 5. Критерии оценки работы студентов ………………………… | 29 |
| Список литературы………………………………………………… | 30 |
Введение
Изучение курса «Основы автоматизации производственных процессов» позволит студенту получить навыки в области разработки автоматизированных систем, использования основных методов построения математических моделей процессов, их элементов и систем управления.
|
|
|
Назначение методических указаний
Изучение теоретических и практических положений в области автоматического контроля, регулирования и управления производственными процессами нефтяной и газовой отрасли; формирование системного мышления в области автоматизации технологических процессов и производств.
Требования к знаниям и умениям студентов
В результате выполнения практической работы студенты должны:
Знать:
- строение и принцип работы приборов автоматизации;
- иметь представления о классификации и выборе средств автоматизации;
- быть в курсе современных тенденций развития средств автоматизации.
Уметь:
- ориентироваться в вопросах оптимального управления процессами нефтегазовых производств на основе и использования современных методов измерений;
- использовать полученные знания на практике.
Владеть:
- принципами формирования технического задания на проектирование автоматических систем в нефтегазовой отрасли;
- методами анализа предлагаемых решений в области автоматизации;
|
|
|
навыками определения достоинств и недостатков технических средств автоматизации.
Краткие теоретические сведения
1.1 Сущность и классификация измерений
Измерение представляет собой информационный процесс, результатом которого является получение измерительной информации. Измерительная информация представляется в числовой форме и в дальнейшем используется оператором или автоматизированной системой.
Объектом измерения является физическая величина, например, масса, расстояние, давление, сила, перемещение, ускорение и т.п.
Для получения измерительной информации необходимо сравнить измеряемую величину с физически однородной ей величиной известного размера. Для числового представления результата сравнения используется единица измерения.
Классификация измерений:
Измерения классифицируют по нескольким признакам, наиболее важные из которых отражены на рисунке 1.1.
По первому классификационному признаку измерения подразделяют на: статические, при которых измеряемая величина остается постоянной во времени в процессе измерения, и динамические, при которых измеряемая величина изменяется в процессе измерения.
Классификация по второму признаку является в большой степени условной, однако широко применяется в измерительной технике. Ею определяются сложившиеся совокупности родственных по природе или применению в отдельных областях науки или техники физических величин.
|
|
|
По третьему признаку измерения подразделяют на три класса.
Измерения максимально возможной точности, достижимой при современном уровне техники. Это измерения, связанные с созданием и воспроизведением эталонов, а также измерения универсальных физических констант.
Контрольно-проверочные измерения, погрешности которых не должны превышать заданного значения. Такие измерения осуществляются в основном государственными и ведомственными метрологическими службами.
Технические измерения, в которых погрешность результата определяется характеристиками средств измерений. Технические измерения являются наиболее распространенными и выполняются во всех отраслях хозяйства и науки. К ним, в частности, относятся и технологические измерения.
Четвертым классификационным признаком служит число измерений (наблюдений при измерении или просто наблюдений), выполняемых для получения результата.

Рисунок 1.1. Классификация измерений
По пятому признаку измерения в зависимости от вида функциональной связи между искомой и непосредственно измеряемой величинами и от способа получения числового значения измеряемой величины все измерения разделяются на: прямые, косвенные, совокупные и совместные.
Прямым называется измерение, при котором искомое значение величины находят непосредственно из опытных данных. Примерами прямых измерений являются измерение сопротивления омметром, измерение мощности ваттметром, измерение давления манометром и т.д.
Косвенным называется измерение, при котором искомое значение величины находят на основании известной зависимости между этой величиной и величинами, подвергаемыми прямым измерениям. При этом числовое значение искомой величины определяется по формуле:
 ,
,
где z – значение искомой величины, a1, a2, …, am – значения непосредственно измеряемых величин.
Примеры косвенных измерений: определение значения активного сопротивления R резистора на основе прямых измерений силы тока I через резистор и падения напряжения U на нем по формуле .
К совокупным относятся производимые одновременно измерения нескольких одноименных величин, при которых искомые значения величин находят решением системы уравнений, получаемых при прямых измерениях различных сочетаний этих величин.
Совместные измерения – это производимые одновременно измерения двух или нескольких неодноименных величин для нахождения зависимости между ними.
Числовые значения искомых величин при совокупных и совместных измерениях определяются из системы уравнений, связывающих значения искомых величин со значениями величин, измеренных прямым (или косвенным) способом.
Чтобы определить числовые значения искомых величин необходимо получить по крайней мере столько уравнений, сколько имеется этих величин, хотя в общем случае число прямых измерений может быть и больше минимально необходимого.
В качестве примера рассмотрим задачу экспериментального определения зависимости сопротивления резистора от температуры. Предположим, что эта зависимость имеет вид
 ,
,
где R0 и Rt – значения сопротивлений резистора при нулевой температуре и температуре t соответственно; α и β – постоянные температурные коэффициенты. Требуется определить значения величин R0, α и β. Очевидно, ни прямыми, ни косвенными измерениями здесь задачу не решить. Поступим следующим образом. При различных (известных) значениях температуры (она может быть измерена прямо или косвенно) t1, t2 и t3 измеряем (прямо или косвенно) значения Rt1, Rt2 и Rt3 и записываем систему уравнений

Решая эту систему относительно R0, α и β, получаем значения искомых величин. Это пример совместных измерений.
1.2 Методы измерений
С учетом того, что метод измерений представляет собой совокупность приемов использования принципов и средств измерений, различают два метода измерений: метод непосредственной оценки и метод сравнения с мерой.
Классификационным признаком в таком разделении методов измерений является наличие или отсутствие при измерениях меры.
Для удобства изложения в дальнейшем используется классификация методов измерений, приведенная на рисунке 1.2.
Метод непосредственной оценки (отсчета) – метод измерений, в котором значение величины определяют непосредственно по отсчетному устройству измерительного прибора прямого действия.

Рисунок 1.2. Классификация методов измерений
- Прибор прямого действия – измерительный прибор, в котором сигнал измерительной информации движется в одном направлении, а именно с входа на выход.
- Метод сравнения с мерой – метод измерения, в котором измеряемую величину сравнивают с величиной, воспроизводимой мерой.
- Методы сравнения в зависимости от наличия или отсутствия при сравнении разности между измеряемой величиной и величиной, воспроизводимой мерой, подразделяют на нулевой и дифференциальный.
- Нулевой метод – это метод сравнения с мерой, в котором результирующий эффект воздействия величин на прибор сравнения доводят до нуля (прибор сравнения, или компаратор, - измерительный прибор, предназначенный для сравнения измеряемой величины с величиной, значение которой известно).
- Дифференциальный метод – это метод сравнения с мерой, в котором на измерительный прибор воздействует разность измеряемой величины и известной величины, воспроизводимой мерой. Этот метод позволяет получать результаты измерений с высокой точностью даже в случае применения относительно неточных измерительных приборов, если с большой точностью воспроизводится известная величина.
- Метод противопоставления – метод сравнения с мерой, в котором измеряемая величина и величина, воспроизводимая мерой, одновременно воздействует на прибор сравнения, с помощью которого устанавливается соотношение между этими величинами.
- Методом замещения называется метод сравнения с мерой, в котором измеряемую величину замещают известной величиной, воспроизводимой мерой. Это, например, взвешивание с поочередным помещением массы и гирь на одну и ту же чашку весов. Метод замещения можно рассматривать как разновидность дифференциального или нулевого метода, отличающуюся тем, что сравнение измеряемой величины с мерой производится разновременно.
1.3 Средства измерений
Классификация средств измерений представлена на рисунке 1.3.

Рисунок 1.3. Классификация средств измерений
Самым многочисленным видом средств измерений являются измерительные устройства, применяемые самостоятельно или в составе измерительных установок и измерительных систем.
Описанные выше различия в методах сравнения измеряемой величины с мерой находят свое отражение и в принципах построения измерительных приборов.

Рисунок 1.4. Структурные схемы прибора
В измерительном приборе прямого действия предусмотрено одно или несколько преобразований сигнала измерительной информации в одном направлении, т.е. без применения обратной связи. Так, например, на рисунке 1.4 (а) приведена структура электронного вольтметра переменного и постоянного тока, которая содержит выпрямитель B, усилитель постоянного тока УПТ и измерительный механизм ИМ. В этом приборе преобразование сигнала измерительной информации идет только в одном направлении.
Характерной особенностью приборов прямого действия является потребление энергии от объекта измерения. Однако это не исключает возможности применения приборов прямого действия для измерения, например, электрического сопротивления или емкости, но для этого необходимо использовать вспомогательный источник энергии.
Измерительный прибор сравнения предназначен для непосредственного сравнения измеряемой величины с величиной, значение которой известно.
На рисунке 1.4 (б) приведена структурная схема автоматического прибора сравнения, содержащая устройство сравнения УС, устройство управления УУ и изменяемую (регулируемую) меру М с отсчетным устройством.
Измеряемая величина x и однородная с ней величина x0 подаются на входы устройства сравнения УС. Величина x0 получается от регулируемой меры М. В зависимости от результата сравнения x с x0 устройство управления УУ воздействует на меру М таким образом, чтобы величина |x — x0| уменьшалась. Процесс уравновешивания заканчивается, когда x0 = x. При этом значение измеряемой величины отсчитывается по шкале регулируемой меры. Если в устройстве сравнения происходит вычитание величин x и x0, то в данном приборе реализуется сравнение измеряемой величины с мерой нулевым методом.
Очевидно, что любой измерительный прибор сравнения должен иметь цепь обратной связи и замкнутую структуру. Обратная связь может применяться и в приборах прямого действия, однако в них она всегда охватывает не весь процесс преобразования, а только его часть. Например, в структурной схеме на рисунке 1.4 (а) усилитель постоянного тока может быть охвачен обратной связью. В измерительных приборах сравнения в цепи обратной связи всегда формируется физическая величина, однородная с измеряемой, которая подается на вход прибора.
Следует отметить, что сравнение измеряемой величины с мерой в приборах сравнения может осуществляться либо одновременно (нулевой метод), либо разновременно (метод замещения).
Аналоговые измерительные приборы (АИП) характеризуются тем, что их показания являются непрерывными функциями изменений измеряемых величин. Все многообразие АИП можно свести к трем структурным схемам, показанным на рисунке 1.5.

Рисунок 1.5. Структурные схемы АИП
Структурная схема, приведенная на рисунке 1.5 (а), соответствует АИП прямого действия. В данных АИП преобразование измерительной информации осуществляется только в одном направлении от входа к выходу. Измеряемая величина x с помощью измерительного преобразователя ИП преобразуется в напряжение или ток, который воздействует на электромеханический измерительный механизм ИМ, взывая перемещение его подвижной части и связанного с ней указателя отсчетного устройства ОУ. Отсчетное устройство содержит оцифрованную шкалу, с помощью которой оператор On получает количественный результат измерения. Градуировка шкалы прибора производится путем подачи на его вход ряда известных значений измеряемой величины, реализуемых многозначной образцовой мерой М. Таким образом, сравнение измеряемой величины с единицей измерения в данном случае осуществляется косвенно, а мера М в процессе измерения непосредственного участия не принимает.
На рисунке 1.5 (б) изображена структура АИП сравнения. Эти приборы предназначены для непосредственного сравнения измеряемой величины с величиной, значение которой известно. Устройство сравнения УС сравнивает значения преобразованной с помощью ИП измеряемой величины и образцовой величины, реализуемой регулируемой мерой М. Оператор On с помощью индикатора И оценивает результат сравнения и регулирующее значение величины, воспроизводимой мерой М, до достижения равенства величин на входах УС. Значение величины, воспроизводимой мерой М, отображается отсчетным устройством ОУ, которое может быть отградуировано в единицах измеряемой величины.
При отсутствии ИП на входе АИП осуществляется непосредственное сравнение измеряемой величины с физически однородной ей величиной, воспроизводимой мерой.
Обобщенная структура автоматического АИП сравнения приведена на рисунке 1.5 (в). Принцип действия аналогичен описанному выше, но мера М регулируется автоматически с помощью устройства управления УУ.
В АИП применяются различные ИМ, предназначенные для преобразования электрической энергии в механическую энергию перемещения подвижной части относительно неподвижной (рисунок 1.6).

Рисунок 1.6. Схемы магнитоэлектрического
(а), электродинамического (б),ферродинамического (в) и электростатического (г) ИМ
В магнитоэлектрическом ИМ (рисунок 1.6, а) рамка подвижной части перемещается в магнитном поле воздушного зазора. На рамку действует вращающий момент
 ,
,
где B – магнитная индукция в рабочем зазоре, S – активная площадь рамки, ω – число витков обмотки рамки, I – измеряемый ток.
Кроме вращающего момента на подвижную часть ИМ действует противодействующий момент, создаваемый обычно пружиной
 ,
,
где α – угол поворота подвижной части, W – удельный противодействующий момент. Рамка жестко соединена со стрелкой. Движение подвижной части происходит до тех пор, пока  . В этом положении стрелки производят отсчет показаний по отсчетному устройству ОУ (обычно шкала).
. В этом положении стрелки производят отсчет показаний по отсчетному устройству ОУ (обычно шкала).
Магнитоэлектрические ИМ применяются в амперметрах, вольтметрах, гальванометрах, омметрах и обеспечивают высокую точность (класс 0,05), равномерную шкалу, высокую чувствительность, малое собственное потребление мощности, большой диапазон измерений. Однако они имеют сложную конструкцию, показания зависят от температуры и пригодны для измерения только в цепях постоянного тока.
В электродинамических ИМ вращающий момент создается при взаимодействии тока, проходящего по рамке подвижной части, с магнитным потоком, создаваемым током, проходящим через неподвижные катушки возбуждения (рисунок 1.6, б). К их достоинствам относятся возможность использования в цепях как постоянного, так и переменного тока, стабильность показаний во времени. Однако шкала неравномерна, чувствительность невысокая, показания зависят от частоты сигнала, температуры, внешних магнитных полей, боятся тряски, вибраций, сложны по конструкции. Применяются в амперметрах, вольтметрах, ваттметрах, частотомерах, фазометрах классов точности 0,5, 0,2, 0,1.
Ферродинамические ИМ отличаются от электродинамических тем, что неподвижная катушка расположена на сердечнике из ферромагнитного материала (рисунок 1.6, в), что приводит к значительному увеличению Mвр и уменьшению влияния внешних магнитных полей. Однако про этом снижается точность за счет наличия потерь на гистерезис и вихревые токи. Поэтому их применение ограничено цепями переменного тока до 1,5 кГц в качестве амперметров, вольтметров, ваттметров. Промышленность выпускает тряско-, вибро- и ударопрочные ферродинамические приборы классов точности 1,5 и 2,5, переносные класса 0,5, щитовые классов 0,2 и 0,5. В цепях постоянного тока практически не используются из-за потерь на гистерезис.
В электростатических ИМ (рисунок 1.6, г) для перемещения подвижной части используется взаимодействие двух или нескольких электрически заряженных проводников. Измеряемое напряжение приложено к неподвижным и подвижным электродам из алюминия и создает между ними электростатическое поле и вращающий момент Mвр, поворачивающий подвижный электрод. Используются в цепях постоянного и переменного тока (до 10 МГц), показания не зависят от частоты и формы измеряемого напряжения, от внешних магнитных полей, имеют большой диапазон измеряемых напряжений (сотни кВ). Однако имеют малую чувствительность, показания зависят от внешних электрических полей, классы точности 0,5, 1,0, 1,5.
В практике измерений широко применяются выпрямительные приборы, представляющие собой сочетание диодного выпрямителя и магнитоэлектрического ИМ. Такая комбинация обеспечивает измерение как постоянных, так и переменных токов в широком диапазоне частот (до 20 кГц). Промышленно выпускается в виде авометров.
Для измерений токов высокой частоты (до сотен МГц) используются термоэлектрические приборы – сочетание магнитоэлектрического ИМ и термоэлектрического преобразователя, выполненного в виде термопары и нагревателя (допустимая температура 600..800 °С). Измеряемый ток протекает через нагреватель (проволока из вольфрама, нихрома и константана), температура которого определяется величиной этого тока. Термо-ЭДС термопары, пропорциональная величине тока, измеряется магнитоэлектрическим ИМ. Класс точности 0,5 и 1,0, диапазоны измерения 100 мА ..10 А, 0,75..50 В. Однако показания приборов зависят от температуры окружающей среды, входное сопротивление низкое (200..300 Ом/В), малая чувствительность. Применяются в качестве амперметров, вольтметров, ваттметров.
Электронные АИП представляют собой сочетание электронной части (выпрямитель, усилитель) и магнитоэлектрического ИМ. Отличаются большим диапазоном измеряемых величин и быстродействием. Применяются в качестве вольтметров, частотомеров, измерителей емкости, сопротивления, индуктивности, параметров транзисторов, интегральных схем и др.
Цифровые измерительные приборы (ЦИП) осуществляют автоматическое преобразование входной измеряемой величины в код. Показания ЦИП представлены в цифровой форме. В отличие от АИП в ЦИП обязательно выполняются операции квантования измеряемой величины по уровню, дискретизации ёё по времени и кодирование (рисунок 1.7).

Рисунок 1.7. Обобщенная структурная схема ЦИП
Измеряемая аналоговая величина x(t) поступает на унифицирующий измерительный преобразователь (УИП), содержащий делители, усилители, выпрямители, фильтры, преобразователи линеаризации и т.п. Нормализованный аналоговый сигнал y(t) поступает на вход аналого-цифрового преобразователя (АЦП), который выполняет операции квантования по уровню и по времени x(t), сравнения x(t) с мерой M и кодирование результатов. При этом на выходе формируется дискретный сигнал ДС, который преобразуется в цифровом средстве отображения информации (ЦСОП) в цифровой отсчет N или в виде кода передается на ЭВМ. Устройство управления (УУ) реализует необходимый алгоритм измерения.
Преимуществами ЦИП перед АИП являются:
- удобство и объективность отсчета;
- высокая точность результатов измерения, практически недостижимая для АИП;
- широкий динамический диапазон при высокой разрешающей способности;
- высокое быстродействие за счет отсутствия подвижных электромеханических элементов;
- возможность автоматизации процесса измерения, включая такие операции, как автоматический выбор полярности и пределов измерения;
- высокая устойчивость к внешним механическим и климатическим воздействиям, помехозащищенность;
- возможность использования новейших достижений микроэлектронной технологии при конструировании и изготовлении;
- возможность сочетания с вычислительными и другими автоматическими устройствами.
Промышленно выпускаются в виде цифровых вольтметров, частотомеров, фазометров, омметров, осциллографов и т.д.
В соответствии с определением измерительные преобразователи формируют сигнал измерительной информации, удобный для дальнейшего преобразования, хранения, передачи, обработки. Как видно из рисунка 1.3 они могут быть классифицированы в зависимости от используемого метода измерения и способа представления величины аналогично измерительным приборам. Кроме того, принято различать измерительные преобразователи по расположению в измерительной системе и виду функции преобразования.
1.4 Погрешности средств измерений
При любом измерении имеется погрешность, представляющая собой отклонение результата измерения от истинного значения измеряемой величины. На рисунке 1.8 приведена классификация погрешностей средств измерений по ряду признаков.

Рисунок 1.8. Классификация погрешностей измерительных устройств
Систематическая погрешность – составляющая погрешности измерения, остающаяся постоянной или закономерно изменяющаяся при повторных измерениях одной и той же величины. По характеру проявления систематические погрешности разделяются на постоянные и переменные. Переменные в свою очередь могут быть прогрессирующими, периодическими и изменяющимися по сложному закону.
Для исключения систематической погрешности наибольшее распространение в практике получил метод поправок.
Случайная составляющая погрешности при повторных измерениях одной и той же величины изменяется случайным образом. Обычно она является следствием одновременного действия многих независимых причин, каждая из которых в отдельности мало влияет на результат измерения. Случайные погрешности не могут быть исключены из результата измерения, но теория вероятности и математическая статистика позволяют оценить результат измерения при наличии случайных погрешностей. Они характеризуются свойствами, которые формулируют двумя аксиомами:
1. Аксиома случайности — при очень большом числе измерений случайные погрешности, равные по величине и различные по знаку, встречаются одинаково часто. Число отрицательных погрешностей равно числу положительных.
2. Аксиома распределения — малые погрешности встречаются чаще, чем большие. Очень большие погрешности не встречаются.
Случайные погрешности рассматриваются как случайные величины, подчиняющиеся некоторому симметричному закону распределения.
Основной погрешностью называют погрешность при использовании средства измерений в нормальных условиях. Нормальными условиями применения средств измерений называют условия, при которых влияющие величины имеют номинальные значения или находятся в пределах нормальной области значений. Нормальные условия применения указываются в стандартах или технических условиях на средства измерений. При использовании средств измерений в нормальных условиях считают, что влияющие на них величины практически никак не изменяют их характеристики.
Дополнительной погрешностью измерительного преобразователя (или изменением показаний измерительного прибора) называют изменение его погрешности, вызванной отклонением одной из влияющих величин от ее нормативного значения или выходом ее за пределы нормальной области значений. Дополнительная погрешность может быть вызвана изменением сразу нескольких влияющих величин.
Изменение погрешности, как и других характеристик и параметров измерительных устройств под действием влияющих величин, описывается функциями влияния.
Иными словами, дополнительная погрешность – это часть погрешности, которая добавляется (имеется в виду алгебраическое сложение) к основной в случаях, когда измерительное устройство применяется в рабочих условиях. Рабочие условия обычно таковы, что изменения значений влияющих величин для них существенно больше, чем для нормальных условий, т. е. область рабочих (часть этой области называют расширенной областью) условий включает в себя область нормальных условий.
В некоторых случаях основная погрешность измерительных устройств определяется для рабочей области изменения значений влияющих величин. В этих случаях понятие дополнительной погрешности теряет смысл.
В зависимости от режима применения различают статическую и динамическую погрешности измерительных устройств.
По форме представления принято различать абсолютную, относительную и приведенную погрешности измерительных устройств. У измерительных приборов имеется шкала, отградуированная в единицах входной величины, либо шкала, отградуированная в условных единицах с известным множителем шкалы, поэтому результат измерения представляется в единицах входной величины. Это обусловливает простоту определения погрешности измерительных приборов.
Абсолютной погрешностью измерительного прибора Δ называют разность показаний прибора ХП и истинного (действительного) ХД значения измеряемой величины:

Действительное значение определяется с помощью образцового прибора или воспроизводится мерой.
Относительной погрешностью измерительного прибора называют отношение абсолютной погрешности измерительного прибора к действительному значению измеряемой величины. Относительную погрешность выражают в процентах:
 .
.
Так как Δ << XД или ХП, то в вышеприведенном выражении вместо значения XД может быть использовано значение XП.
Приведенной погрешностью измерительного прибора называют отношение абсолютной погрешности измерительного прибора к нормирующему значению ХN. Приведенную погрешность также выражают в процентах:
 .
.
В качестве нормирующего значения используется верхний предел измерений, диапазон измерений и др., т. е.
.
Средства измерений могут использоваться в статическом или динамическом режиме работы. В статическом режиме измеряемая величина не изменяется во времени, а отсчет выполняется тогда, когда практически окончены переходные процессы, вызванные подключением измеряемой величины ко входу средства измерений. В динамическом режиме измеряемая величина изменяется во времени. В соответствии с этим различают статическую погрешность средства измерений и погрешность средства измерений в динамическом режиме.
Очевидно, что погрешность средства измерений в динамическом режиме включает в себя статическую погрешность и погрешность, обусловленную инерционностью средства измерений. Последняя погрешность носит название динамической погрешности средства измерений и определяйся как разность между погрешностью средства измерений в динамическом режиме и его статической погрешностью, соответствующей значению величины в данный момент времени.
При анализе погрешностей средств измерений и выборе способов их уменьшения весьма важным является разделение погрешностей по их зависимости от значения измеряемой (преобразуемой) величины. По этому признаку, погрешности делятся на аддитивные, мультипликативные, линейности и гистерезиса.
Аддитивную погрешность иногда называют погрешностью нуля, а мультипликативную – погрешностью чувствительности. Реально погрешность средства измерений включает в себя обе указанные составляющие.
Кроме того, номинальная функция преобразования средства измерений – это в большинстве случаев более простая функция (обычно линейная), чем градуировочная характеристика.
Графически образование перечисленных погрешностей показано на рисунке 1.9.

Рисунок 1.9. Реальные функции преобразования измерительных устройств
Аддитивная погрешность постоянна при всех значениях измеряемой величины (рисунок 1.9, а). На рисунке видно, что реальная функция преобразования  несколько смещена относительно номинальной
несколько смещена относительно номинальной  , т. е. выходной сигнал измерительного устройства при всех значениях измеряемой величины X будет больше (или меньше) на одну и ту же величину, чем он должен быть, в соответствии с номинальной функцией преобразования.
, т. е. выходной сигнал измерительного устройства при всех значениях измеряемой величины X будет больше (или меньше) на одну и ту же величину, чем он должен быть, в соответствии с номинальной функцией преобразования.
Если аддитивная погрешность является систематической, то она может быть устранена. Для этого в измерительных устройствах обычно имеется специальный настроечный узел (корректор) нулевого значения выходного сигнала.
Если аддитивная погрешность является случайной, то ее нельзя исключить, а реальная функция преобразования смещается по отношению к номинальной во времени произвольным образом. При этом для реальной функции преобразования можно определить некоторую полосу (рисунок 1.9, б), ширина которой остается постоянной при всех значениях измеряемой величины.
Возникновение случайной аддитивной погрешности обычно вызвано трением в опорах, контактными сопротивлениями, дрейфом нуля, шумом и фоном измерительного устройства.
Мультипликативной (получаемой путем умножения), или погрешностью чувствительности измерительных устройств, называют погрешность, которая линейно возрастает (или убывает) с увеличением измеряемой величины.
Графически появление мультипликативной погрешности интерпретируется поворотом реальной функции преобразования относительно номинальной (рисунок 1.9, в). Если мультипликативная погрешность является случайной, то реальная функция преобразования представляется полосой, показанной на рисунке 1.9 (г). Причиной возникновения мультипликативной погрешности обычно является изменение коэффициентов преобразования отдельных элементов и узлов измерительных устройств.
На рисунке 1.9 (д) показано взаимное расположение номинальной и реальной функций преобразования измерительного устройства в случае, когда отличие этих функций вызвано нелинейными эффектами. Если номинальная функция преобразования линейная, то вызванную таким расположением реальной функции преобразования систематическую погрешность называют погрешностью линейности. Причинами данной погрешности могут быть конструкция (схема) измерительного устройства и нелинейные искажения функции преобразования, связанные с несовершенством технологии производства.
Зависимость вход-выход измерительных приборов без учета гистерезиса и ухода нуля может быть представлена в виде:
 ,
,
где Xвх – измеряемая (входная) величина, Yвых – выходная величина, a0, a1, …, an – градуировочные коэффициенты.
Реальная функция преобразования может быть представлена линией, примыкающей к пря
мой a0xвх (номинальная функция преобразования) (рисунок 1.10).

Рисунок 1.10. Типичные градуировочные кривые: а – линейная; б – нелинейная при наличии в уравнении преобразования четных степеней xвх; в - нелинейная при наличии в уравнении преобразования нечетных степеней xвх; г – нелинейная при наличии в уравнении преобразования четных и нечетных степеней xвх.
Симметричная кривая (рисунок 1.10, в), описываемая уравнением с нечетными степенями xвх, наиболее желательна с точки зрения линейности. Как будет показано ниже, нелинейные, но симметричные кривые двух чувствительных элементов, включенных дифференциально, дают улучшение линейности путем исключения членов xвх с четными степенями.
Наиболее существенной и трудноустранимой систематической погрешностью измерительных устройств является погрешность гистерезиса (от греч. hysteresis – запаздывание), или погрешность обратного хода, выражающаяся в несовпадении реальной функции преобразования измерительного устройства при увеличении (прямой ход) и уменьшении (обратный ход) измеряемой величины (рисунок 1.9, е). Причинами гистерезиса являются: люфт и сухое трение в механических передающих элементах, гистерезисный эффект в ферромагнитных материалах, внутреннее трение в материалах пружин, явление упругого последействия в упругих чувствительных элементах, явление поляризации в электрических, пьезоэлектрических и электрохимических элементах и др. Существенным при этом является тот факт, что форма получаемой петли реальной функции преобразования зависит от предыстории, а именно от значения измеряемой величины, при котором после постепенного увеличения последней начинается ее уменьшение (на рисунке 1.9, е, это показано пунктирными линиями).
В цифровых (ЦИП) квантование по уровню и времени осуществляется путем замены через время Δt (шаг квантования) значений непрерывной функции ближайшим дискретным уровнем с шагом Q. При этом максимальная погрешность от квантования составит
Δкв = ± Q/2.
Приведенная погрешность определяется по формуле:
 ,
,
где ПД – полный диапазон измеряемой величины.
 ,
,
где N – число уровней квантования (интервалов).
 .
.
Например, измеряет напряжение в диапазоне 0..150 В с γ = 0,1 %. Для определения шага квантования запишем:
 .
.
1.5 Методы повышения точности измерений
Для технологических измерений повышение точности измерений особенно важно в связи с широким применением АСУ ТП. Для решения этой задачи применяются различные методы (рисунок 1.11).

Рисунок 1.11. Классификация методов повышения точности измерений
Уменьшения случайной составляющей погрешности измерений увеличивают число наблюдений (см. рисунок 1.10). Оценку среднеквадратического отклонения результата измерения, которая определяет собой случайную погрешность, теоретически можно сделать как угодно малой, увеличив число наблюдений n. Однако на практике в большинстве случаев трудно обеспечить постоянство самого объекта измерений в течение длительного времени, а это может при увеличении числа наблюдений n привести к увеличению погрешности, а не к ее уменьшению.
Другим методом повышения точности измерений за счет уменьшения случайной составляющей погрешности является использование параллельных одновременных измерений одной и той же физической величины. Для этого необходимо использовать сразу несколько средств измерений. Результаты наблюдений, полученных при этих измерениях, обрабатывают совместно. Теоретическая основа этого метода та же, что и предыдущего метода.
Ранее были рассмотрены основные методы исключения систематической погрешности, а именно: методы, основывающиеся на устранении источников систематической погрешности до начала измерений и методы исключения систематических погрешностей по окончании измерений. К числу последних относятся не только применение поправок и поправочных множителей, но и учет дополнительных погрешностей средств измерений.
Кроме этих методов применяют методы, позволяющие определять и исключать систематическую погрешность в процессе измерений. Последние основываются на такой организации процесса измерений и обработки получаемой измерительной информации, которые обеспечивают исключение погрешности или ее определение. Причем применение таких методов возможно и целесообразно в тех случаях, когда известна природа исключаемой систематической погрешности. К числу этих методов относятся: метод замещения, метод компенсации погрешности по знаку и различные методы, базирующиеся на совместных или совокупных измерениях.
При использовании метода компенсации погрешности по знаку процесс измерения организуется таким образом, что известная систематическая погрешность входит в результат каждого из двух повторных измерений с противоположным знаком. Это позволяет после определения среднего арифметического значения исключить систематическую погрешность.
Сущность методов, базирующихся на совместных или совокупных измерениях применительно к уменьшению систематических погрешностей, состоит в том, что в процессе этих измерений изменяют параметр, отвечающий за возникновение систематической погрешности, или осуществляют измерение физической величины совместно и последовательно с несколькими вспомогательными мерами. В результате получают систему независимых уравнений, из решения которой определяют значения измеряемой физической величины уже с учетом систематической погрешности.
Одним из наиболее радикальных путей повышения точности измерений при прочих равных условиях является использование более точных средств измерений. Появление и развитие микроэлектронной техники и микропроцессоров, обеспечивающие возможность практически полной автоматизации самых сложных измерительных процессов, позволили использовать для увеличения точности средств измерений рассмотренные выше методы повышения точности измерений. Наряду с этими методами для повышения точности средств измерений применяется ряд традиционных методов, классификация которых приведена на рисунке 1.12.
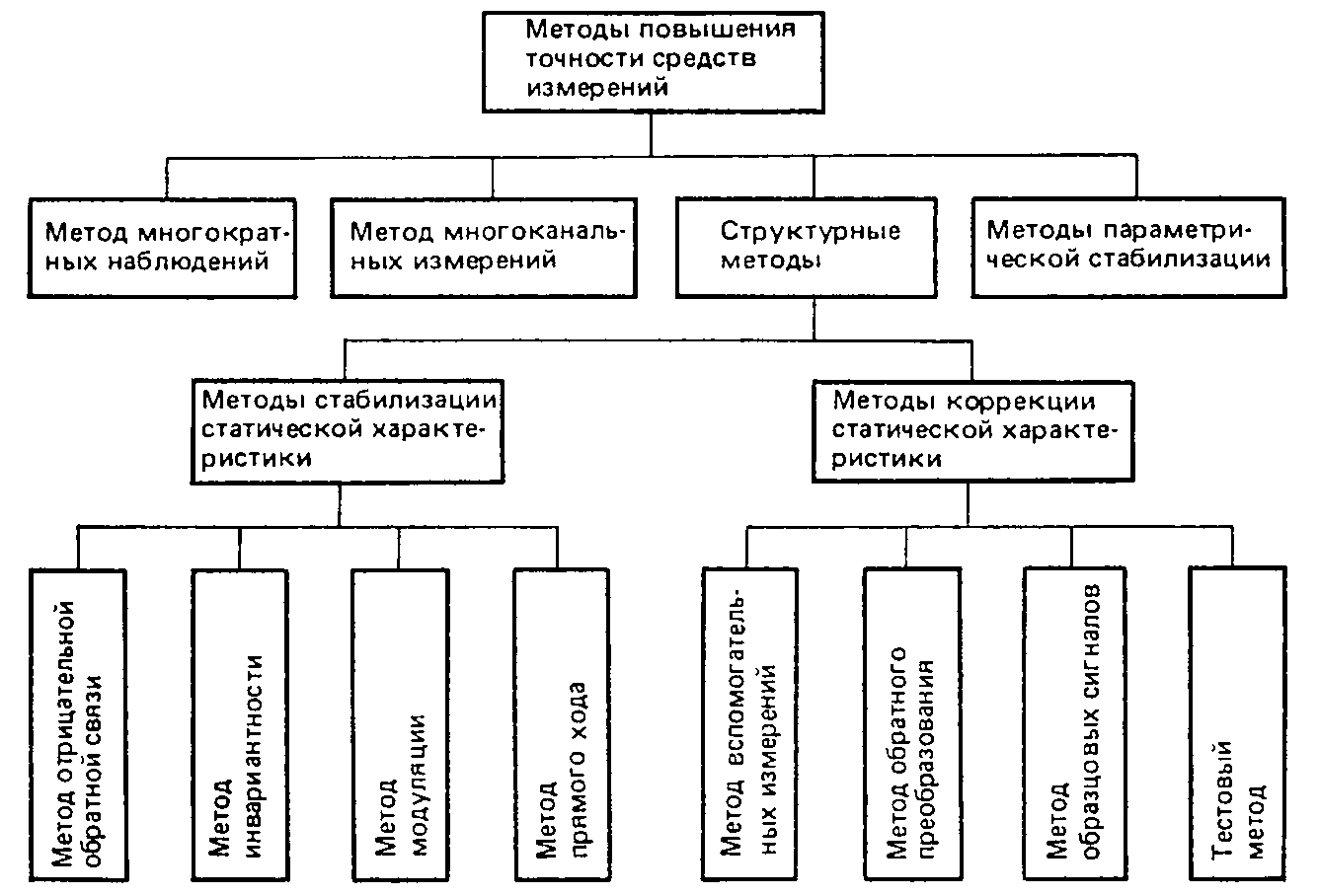
Рисунок 1.12. Классификация методов повышения точности средств измерений
Метод многократных наблюдений используется для уменьшения случайной составляющей погрешности средства измерений и состоит в том, что: за некоторый постоянный интервал времени, отведенный для измерения, выполняют несколько наблюдений, затем с помощью вычислительного устройства, входящего в состав данного средства измерений, вычисляют среднее арифметическое значение измеряемой величины и оценку среднеквадратического отклонения результата измерения.
Метод многоканальных измерений аналогичен рассмотренному методу параллельных измерений (см. рисунок 1.12). Средства измерений, с помощью которых реализуется данный метод, содержат несколько идентичных по характеристикам параллельных измерительных цепей (каналов) и вычислительное устройство. Последнее, получая измерительную информацию по этим каналам, вычисляет среднее арифметическое значение измеряемой величины и оценку среднеквадратического отклонения результата измерения. Такой метод позволяет уменьшить случайную составляющую погрешности средства измерений.
Метод параметрической стабилизации, называемый еще конструктивно-технологическим, состоит в стабилизации статической характеристики средств измерений. Параметрическая стабилизация реализуется путем изготовления средств измерений из точных и стабильных элементов, параметры которых мало подвержены внешним влияниям; термостабилизации; стабилизации параметров питания средств измерений; экранировки средств измерений от магнитных и электрических полей и т. п. Данный метод уменьшает систематическую и случайную погрешности средств измерений. Он является классическим в приборостроении. На основе этого метода до сих пор строится современный парк средств измерений.
Структурные методы основаны на том, что в состав средств измерений включаются дополнительные узлы, элементы и меры, обеспечивающие повышение точности этих средств измерений за счет информации, полученной с их помощью. Структурные методы повышения точности средств измерений подразделяют на методы, обеспечивающие стабилизацию статической характеристики средства измерений, и методы, основанные на коррекции этой характеристики.
Структурные методы стабилизации статической характеристики средств измерений (см. рисунок 1.12).
Метод отрицательной обратной связи реализуем только при наличии преобразовательных элементов или преобразователей, способных осуществлять преобразование выходного сигнала средства измерений во входной (обратный преобразователь). Создание таких преобразователей – часто сложная техническая задача. Применение данного метода обеспечивает уменьшение мультипликативной погрешности и погрешности нелинейности, а относительная аддитивная погрешность при этом не изменяется. В то же время использование метода приводит к уменьшению чувствительности средства измерения. Данный метод повышает точность средств измерения и наряду с методом параметрической стабилизации является наиболее распространенным.
Метод инвариантности состоит в том, что в средстве измерений помимо измерительной цепи (канала) имеется сравнительная цепь (канал), к которой не подается входной сигнал, но которая, как и измерительная цепь, находится под воздействием некоторой влияющей величины. Причем параметры сравнительной цепи подобраны так, что изменение ее сигнала под действием влияющей величины идентично изменению сигнала измерительной цепи под действием этой величины, т. е. возмущения, вызванные влияющей величиной, поступают в средство измерений по двум каналам (принцип двухканальности). Использование разности сигналов измерительной и сравнительной цепей (при дифференциальном включении этих цепей) обеспечивает независимость (инвариантность) результирующего сигнала от названной влияющей величины, т. е. метод обеспечивает исключение дополнительной погрешности, вызванной изменениями некоторой, как правило, основной влияющей величины.
Метод модуляции состоит в том, что сигнал, поступающий на вход средства измерений, или параметры этого средства измерений подвергаются принудительным периодическим изменениям (модуляции) с частотой, не совпадающей (обычно более высокой) с областью частот измеряемого сигнала. Использование метода модуляции позволяет уменьшить погрешности от сил трения, явлений поляризации и гистерезиса.
Метод прямого хода состоит в том, что измеряемый сигнал поступает к чувствительному элементу средства измерений через ключ, с помощью которого осуществляется периодическое во времени отключение измеряемого сигнала от чувствительного элемента и подача к последнему сигнала, значение которого равно нулю. Это обеспечивает работу средства измерений на восходящей ветви (прямой ход) статической характеристики при всех значениях измеряемого сигнала, что исключает наиболее существенную погрешность многих средств измерений – погрешность от вариации.
Структурные методы коррекции статической характеристики (методы коррекции погрешности средств измерений). Перечень их приведен на рисунке 1.12.
Метод вспомогательных измерений заключается в автоматизации процесса учета дополнительной погрешности средства измерений по известным функциям влияния ряда влияющих величин. Для этого осуществляется измерение значений этих величин и с помощью вычислительного устройства, построенного с учетом названных функций влияния, автоматически корректируется выходной сигнал средства измерений.
Метод обратного преобразования (итерационный метод) базируется на использовании дополнительно в составе средства измерений кроме прямой измерительной цепи (прямого преобразователя), цепи, способной осуществлять обратное преобразование выходного сигнала (обратный преобразователь), имеющей существенно большую точность, чем цепь прямого преобразования. Результат измерения получают путем итераций. В процессе каждой итерации последовательно осуществляются: прямое преобразование измеряемой величины и запоминание результата, обратное преобразование запомненного значения этой величины, прямое преобразование сигнала обратного преобразователя, соответствующего запомненному значению измеряемой величины, и сравнение результатов этих двух преобразований, на основе которого формируется корректирующий сигнал. Обратный преобразователь в данном методе играет роль как бы многозначной меры, по которой корректируется статическая характеристика прямого преобразователя. Метод обратного преобразования позволяет уменьшать в зависимости от используемого алгоритма коррекции аддитивную и мультипликативную погрешности средств измерений.
Метод образцовых сигналов (образцовых мер) состоит в определении в каждом цикле измерения реальной функции преобразования средства измерений с помощью образцовых сигналов (мер), т. е. метод состоит в автоматической градуировке средства измерений в каждом цикле. Цикл включает в себя измерение физической величины, поступающей на вход средства измерения, поочередное измерение одной или нескольких мер, подключаемых вместо измеряемой физической величины на вход средства измерений, и решение системы уравнений с помощью вычислительного устройства, из которого определяется значение измеряемой физической величины. В этом решении уже учтены изменения реальной статической характеристики, т. е. данный метод сводится к совокупному измерению. Он позволяет уменьшить аддитивную и мультипликативную погрешность, а также погрешность нелинейности.
Тестовый метод сводится к проведению совокупных измерений. В отличие от метода образцовых сигналов в тестовом методе в каждом цикле работы средства измерений кроме измерения физической величины, поступающей на вход средства измерений, осуществляют измерение величин-тестов, каждая из которых формируется из меры и измеряемой величины. Значение измеряемой величины определяется из системы уравнений, решаемой с помощью вычислительного устройства. По существу данный метод является развитием метода образцовых сигналов.
Задания для выполнения практической работы
Изучить конструкция,принцип действия, прибора автоматизации. Представить классификацию, разновидности прибора и области применения. Исследовать современную продукцию отечественного и зарубежного производства. На примере выбранных 2-х аналогичных приборов отечественного и импортного производства провести сравнительный анализ достоинств и недостатков, систематизировать полученную информацию и сделать выводы о проделанной работе.
Варианты выбора заданий для выполнения практической работы
Таблица 1
Дата добавления: 2018-02-28; просмотров: 1204; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!