Уравнение электрического состояния, схема
Замещения и векторная диаграмма фазы синхронного
Двигателя
В отличие от синхронного генератора в синхронном двигателе ось полюсов ротора отстает от оси полюсов вращающегося магнитного поля статора (см. рис. 15.3, б). Возникающий при этом электромагнитный момент равен противодействующему тормозному моменту на валу двигателя Мэм = Мтор. В синхронном двигателе электрическая энергия преобразуется в механическую. На рис. 15.15 приведена схема замещения фазы синхронного двигателя, подключенного к электрической системе большой мощностиU= const. Эта схема замещения совпадает со схемой замещения фазы синхронного генератора, подключенного к системе большой мощности (см. рис. 15.7), с той разницей, что в первом случае электрическая энергия поступает из системы в двигатель, а во втором случае — из генератора в систему.
Из схемы замещения (рис. 15.15) следует уравнение электрического состояния фазы синхронного двигателя
ё0= й-jxi, (15.16)
где Ё0 = jw\i>0,X = Хрж + Хс совпадают по своему физическому смыслу с аналогичными понятиями, обсуждавшимися при анализе синхронного генератора (см. 15.4).
Уравнению электрического состояния (15.16) соответствует векторная диаграмма фазы синхронного двигателя на рис. 15.16. На векторной диаграмме сдвиг фаз Э соответствует геометрическому углу между осью полюсов ротора и осью результирующего магнитного
|
|
|
Рис. 15.16
поля синхронного двигателя, деленному на число пар полюсов (как и у генератора). Но для синхронной машины, работающей в режиме двигателя, значение угла 0 всегда больше нуля.
Электромагнитный момент и угловая характеристика синхронного двигателя
Электрическая мощность трехфазного синхронного двигателя определяется, как и мощность трехфазного синхронного генератора [см. (15.9)]:
Р = ЗК/совф = 3^/cosift, = 3i?0/cos(<£ - 0), (15.17)
| Рис. 15.15 |
где для синхронного двигателя 0 > 0.
| (15.19) |
Преобразуя (15.17) аналогично (15.9) и учитывая, что 0 > 0, получаем выражение для электромагнитного момента синхронного двигателя, совпадающее с выражением электромагнитного момента синхронного генератора (15.11):
|
|

(15.18)
Так как механическая мощность синхронного двигателя Рмех = Р = = Мэм1jjp, то, учитывая (15.18), имеем
Рщ* =Р = ЗОТсо8ф = 3 EJJ^.
Напряжение Uи частота /0 в электрической системе большой мощности — постоянные величины. Учитывая это обстоятельство, можно сделать вывод, что значения электромагнитного момента Мэм и мощности Р синхронного двигателя, подключенного к такой системе, при постоянном токе возбуждения IB= const зависят только от угла 0. Такие зависимости Мэм(0) и Р(0) называются угловыми харак
теристиками синхронного двигателя и имеют вид, аналогичный угловым характеристикам синхронного генератора на рис. 15.10.
|
|
|
Угловые характеристики позволяют анализировать процессы в синхронном двигателе при изменении нагрузки. При увеличении тормозного момента на валу синхронного двигателя Мтор2> Мтор1 = = Мэм1 частота вращения ротора машины уменьшается и значения угла 0 и электромагнитного момента Мэм начинают возрастать. Равновесие тормозного и электромагнитного моментов восстановится (Мтор2 = М,м2) через некоторый промежуток времени при новом значении угла 02> 0Х. Для того чтобы сохранить запас устойчивости тг/2 — 0 при возросшем тормозном моменте, необходимо увеличить ток возбуждения.
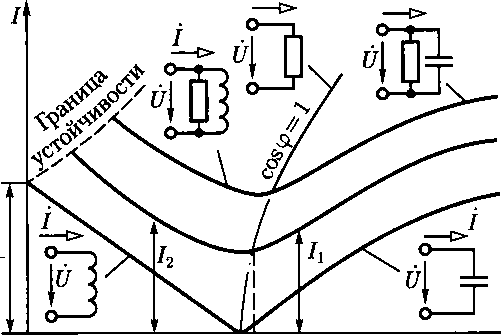
U-образная характеристика синхронного двигателя
Значение тока возбуждения влияет не только на запас устойчивости синхронного двигателя, но и на его реактивный ток. Чтобы проанализировать эту зависимость, воспользуемся векторной диаграммой фазы синхронного двигателя, подключенного к системе большой мощностиU =const, приведенной на рис. 15.16. При постоянном тормозном моменте на валу синхронного двигателя Мтор = = М:т его мощность Р = М.шиэр постоянна, следовательно, из (15.18) и (15.19) значения произведений сомножителей Е0sin0 = ооФо^в = = const и / coscp = /а = const всегда постоянны и не зависят от тока возбуждения. На рис. 15.17 приведена совокупность векторных диаграмм фазы синхронного двигателя с постоянным тормозным моментом Мтор = const при различных токах возбуждения IB= var.
|
|
|
EosinO
|
|

При уменьшении тока возбуждения 1В (потокосцепления возбуждения Ф0) угол 0 возрастает до тех пор, пока электромагнитный момент по (15.18) станет меньше тормозного момента и синхронный двигатель потеряет устойчивость.
Из векторных диаграмм следует, что значение тока статора синхронного двигателя / = /а + /р и его сдвиг по фазе ср относительно напряжения системыUзависят от тока возбуждения /в При токах возбуждения, меньших (больших) некоторого граничного значения 1В< /В.ФСР) (/„ > 4гРСР))>ток статора /имеет индуктивнуюIpL(емкостную 1рС) реактивную составляющую ср2> 0 (<Pi < 0)- Следовательно, при недовозбуждении (перевозбуждении) реактивная мощность синхронного двигателя имеет индуктивныйQL =3UIpL(емкостный Qc= -3UIpC)характер.
В соответствии с этим фазу синхронного двигателя, подключенного к электрической системе большой мощности, можно представить в виде эквивалентной схемы замещения, состоящей из параллельного соединения эквивалентного резистивного элемента, сопротивление которого зависит от тормозного моментаR(MTop) =J7//a>и эквивалентного индуктивного (емкостного) элемента, индуктивность (емкость) которого зависит от тормозного момента и тока возбуждения:
|
|
|
L(/B,MTop) = U/(uLpL) [С(/в,Мтор) = IpC/uU\.
Если тормозной момент двигателя равен нулю, то в эквивалентной схеме замещения фазы синхронного двигателя резистивный элемент отсутствует, а значение параметра индуктивного (емкостного) элемента зависит только от тока возбуждения.
Зависимость тока статора от тока возбуждения 1(1В) при постоянном тормозном моменте на валу Мтор = const называется V-образной характеристикой синхронного двигателя (рис. 15.18).
|
|
| I |
| I |
| 42 1в.гр(Р) hi |
| P p=o |
| и X |
| 0 |
Если на валу двигателя нет тормозного момента (Мтор = 0), то, пренебрегая всеми видами потерь, можно считать ток статора синхронного двигателя реактивным (рис. 15.18, Р = 0), т.е.
. .-Ё0 + Ц U+
рjX jX '
Дата добавления: 2018-02-28; просмотров: 715; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!