Выбор принципа построения системы телеуправления –телесигнализации (ТУ – ТС)
Федеральное агентство по образованию Российской Федерации Государственное образовательное учреждение высшего профессионального образования “Южно-Уральский государственный университет” Факультет «Приборостроительный» Кафедра «Автоматика и Управление» РАБОТА ПРОВЕРЕНА ДОПУСТИТЬ К ЗАЩИТЕ Рецензент Заведующий кафедрой Подлинева Т.К. Казаринов Л.С. ______________2009г. _____________2009г. Телемеханические системы передачи команд управления и контроля АМ сигналом по симметричному кабелю ПОЯСНИТЕЛЬНАЯ ЗАПИСКА К ВЫПУСКНОЙ КВАЛИФИКАЦИОННОЙ РАБОТЕ ЮУрГУ–220200.62.2009.183.00 ПЗ ВКР Руководитель проекта Радкевич А.И. ____________2009г. Автор проекта студент группы ПС-438 Балабаев А.И. ____________2009г. Нормоконтролер Барбасова Т.А. ____________2009г. Челябинск 2009
|
|
|
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
Государственное образовательное учреждение высшего профессионального образования
«ЮЖНО-УРАЛЬСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ»
Факультет «Приборостроительный»
Кафедра «Автоматика и Управление»
Специальность «220200.62»
УТВЕРЖДАЮ
Заведующий кафедрой
Казаринов Л.С.
_______________2009г.
ЗАДАНИЕ
на выпускную квалификационную работу студента
______________Балабаева Алексей Игоревича_____________
Группа 438
1 Тема работы
Телемеханические системы передачи команд управления и контроля АМ сигналом по симметричному кабелю
|
|
|
2 Срок сдачи студентом законченной работы
3 Исходные данные к работе
число исполнительных пунктов......................................................................... 9;
количество команд управления на один ИП................................................... 16;
количество команд сигнализации с одного ИП.............................................. 16;
тип линии связи................................................................ симметричный кабель;
расстояние между ДП и ИП...................................................................... 103 км;
разрешенный для использования диапазон частот.......................... 0,3-3,4 кГц;
время передачи одной команды.................................................................. 0,1 с;
среднее число импульсов помехи в секунду........................................ 2,5 имп/с;
вид манипуляции............................................................................................ АМ;
максимальная пиковая мощность передатчика..................................... 1,024Вт.
4 Содержание расчетно-пояснительной записки
1) Формат команд ТУ-ТС;
2) Спектр линейного сигнала;
3) Расчет вероятности ошибочного приема посылки при всех видах помех;
4) Расчет помехоустойчивости системы;
5) Расчёт линии передачи;
6) Алгоритмы работы ЦА ДП и ИП;
7) Электрический расчет одного из элементов линейного окончания.
|
|
|
5 Перечень графического материала
1) Блок-схемы работы ЦА ДП и ИП;
2) Принципиальные схемы ЦА ДП и ИП.
 АННОТАЦИЯ
АННОТАЦИЯ
Балабаев А.И. Телемеханические системы передачи команд управления и контроля АМ сигналом по симметричному кабелю. – Челябинск: ЮУрГУ, ПС; 2009, 77 с. 35 ил., библиогр. список – 6 наим., лист чертежей ф. А1.
В данной работе рассматривается разработка телемеханической системы передачи команд управления и контроля АМ сигналом по симметричному кабелю.
Проектируемая система включает в себя диспетчерский пункт (ДП), с пульта которого осуществляется управление исполнительными пунктами (ИП) и непосредственно сами исполнительные пункты.
В качестве исполнительных пунктов рассматриваются машины-насосы, предназначенные для орошения полей. При этом на каждой такой машине установлено по 8 насосов.
Согласно ТЗ количество команд управления на один ИП равно 16. Т.е. по две команды на каждый насос (команды “Включить” и “Выключить”).
Согласно ТЗ количество команд сигнализации с одного ИП равно 16. Т.е. на каждый насос приходится по две команды сигнализации (команды “Включено” и “Выключено”).
Наряду с управлением работой насосов проектируемая система позволяет отслеживать состояние каждого насоса и регистрировать любое изменение в состоянии любого насоса.
|
|
|
 ОГЛАВЛЕНИЕ
ОГЛАВЛЕНИЕ
Введение................................................................................................... 6
1 СТРУКТУРА И ПРИНЦИП ПОСТРОЕНИЯ СИСТЕМЫ....................... 7
1.1 Выбор принципа построения системы
телеуправления - телесигнализации (ТУ – ТС)............................... 7
1.2 Формат команд ТУ-ТС.................................................................... 10
1.3 Выбор синхрокомбинации.............................................................. 11
2 Условия приема элементарного сигнала........................ 13
2.1 Определение скорости передачи информации............................... 13
2.2 Спектр линейного сигнала.............................................................. 14
3 Расчет помехоустойчивости системы.............................. 19
3.1 Расчет помехоустойчивости системы
при флуктуационной помехе........................................................... 19
3.2 Расчет помехоустойчивости системы при импульсной помехе..... 23
4 Расчет линии передачи............................................................... 24
5 СТРУКТУРНАЯ И ФУНКЦИОНАЛЬНАЯ СХЕМЫ
СИСТЕМЫ ТУ - ТС................................................................................ 27
5.1 Общая структура системы ТУ-ТС.................................................. 27
5.2 Алгоритм работы системы ТУ-ТС.................................................. 28
5.3 Выявитель синхрокомбинаций........................................................ 30
5.4 Аппаратура ИП…………………………………………………………37
5.4.1 Операционный автомат ИП (ОА ИП).................................... 40
5.4.1.1 Приемник ОА ИП………………………………………....40
5.4.1.2 Передатчик ОА ИП………………….…………………....43
5.4.2 Управляющий автомат ИП (УА ИП)……………………………45
5.5 Аппаратура ДП…………………………………………………………48
5.5.1 Операционный автомат ДП (ОА ДП)..................................... 51
5.5.1.1 Приемник ОА ДП………………………………………....51
5.5.1.2 Передатчик ОА ДП………………….…………………....56
5.5.2 Управляющий автомат ДП (УА ДП)……………………………59
5.6 Внешний вид панели ДП................................................................. 65
6 ЛИНЕЙНОЕ ОКОНЧАНИЕ.................................................................... 67
6.1 Структура линейного окончания.................................................... 67
6.2 Амплитудный модулятор................................................................ 68
6.3 Предварительный усилитель и усилитель мощности.................... 69
6.4 Фильтр нижних частот (ФНЧ)......................................................... 70
6.5 Полосовой фильтр (ПФ).................................................................. 70
6.6 Двусторонний ограничитель........................................................... 73
6.7 Амплитудный детектор................................................................... 74
6.8 Преобразовательное устройство.................................................... 74
6.9 Согласующее устройство................................................................ 75
Заключение........................................................................................... 76
БИБЛИОГРАФИЧЕСКИЙ СПИСОК......................................................... 77
 ВВЕДЕНИЕ
ВВЕДЕНИЕ
Телемеханика ¾ область науки и техники, охватывающая теорию и технические средства контроля и управления объектами на расстоянии с применением специальных преобразователей сигналов для эффективного использования каналов связи.
Управление объектами обеспечивается командной информацией, направленной к объектам и включающей телеуправление и телерегулирование, контроль объектами ¾ известительной информацией, направленной от объектов и включающей телеизмерение, телесигнализацию и статистическую информацию.
Системы телемеханики имеют следующие отличительные особенности:
1) необходимость большой точности передачи информации телеизмерения;
2) недопустимость большого запаздывания в передаче информации при управлении;
3) необходимость в большой надежности передачи команд, так как ошибки при передаче команд могут привести к аварии;
4) отличие входных и выходных устройств от таких же устройств в системах связи. Источниками информации в устройствах телемеханики являются датчики, ключи. На выходе применяются сигнализаторы, приборы и реле;
5) централизованность передачи информации.
Рассмотрим основные понятия, применяемые в рамках данной работы.
Система телесигнализации(ТС) ¾ система, осуществляющая передачу различных дискретных величин, которые могут вводиться в ЭВМ или сообщать диспетчеру о состоянии контролируемых объектов с помощью звуковой или цифровой сигнализации.
Система телеуправления(ТУ) ¾ система, осуществляющая передачу информации в виде команд на включение или отключение различных механизмов. Эти команды или посылаются диспетчером с пункта управления (ПУ), или подаются с ЭВМ на измерение уставок в регуляторах.
Система телеуправления и телесигнализации(ТУ-ТС) ¾ система, позволяющая передавать команды с диспетчерского пункта (ДП) на исполнительный пункт (ИП) и получать известительную сигнализацию об исполнении команды, посылаемую с ИП на ДП, и сигнализацию об изменении состояния объекта.
 1 СТРУКТУРА И ПРИНЦИП ПОСТРОЕНИЯ СИСТЕМЫ
1 СТРУКТУРА И ПРИНЦИП ПОСТРОЕНИЯ СИСТЕМЫ
Выбор принципа построения системы телеуправления –телесигнализации (ТУ – ТС)
Согласно техническому заданию целью данной работы является проектирование телемеханической системы передачи команд управления и контроля АМ сигналом по симметричному кабелю, которая в данном случае включает в себя один диспетчерский пункт, с которого осуществляется управление 9-ю исполнительными пунктами.
В данном случае в качестве исполнительных пунктов рассматриваются машины-насосы, предназначенные для орошения полей. При этом на каждом таком исполнительном пункте установлено по восемь насосов. С диспетчерского пульта по линии связи поступают шестнадцать команд телеуправления, которые предназначены для управления насосами. По две команды на каждый насос (команды “Включить” и “Выключить”). Шестнадцать команд телесигнализации, поступающих с каждого исполнительного пункта на диспетчерский, предназначены для определения состояния насосов. При этом на каждый насос приходится по две команды (команды “Включено” и “Выключено”).
Решение о посылки той или иной команды телеуправления решает диспетчер. Посылает команду диспетчер со своего диспетчерского пульта путем набора номера необходимой команды телеуправления (ТУ) и номера исполнительного пункта (ИП), которому будет послана данная команда ТУ при помощи соответствующих кнопок. Набранная команда ТУ передается в линию связи по нажатию на диспетчерском пульте кнопки “Посылка”. С целью того, чтобы исключить возможную ошибку диспетчера, связанную с неправильным набором номера команды ТУ или номера ИП, на диспетчерском пульте расположены семисегментные индикаторы, предназначенные для визуального отображения информации, вводимой диспетчером. При этом управляющее оборудование формирует информационный пакет, который содержит посланную команду, предназначенную одному из исполнительных пунктов. Сигнал подвергается амплитудной манипуляции и поступает в линию связи. На панели диспетчерского пункта также расположено 72 светодиода, которые предназначены для отображения состояния каждого из насосов на каждом исполнительном пункте. Напротив номеров насосов, которые в данный момент включены, горит соответствующий светодиод.
Исполнительный пункт при этом получает команду; проверяет, ему ли была предназначена посланная команда, путем проверки на соответствие
адресных разрядов принятой команды со своим адресом; осуществляет проверку принятой команды на четность.
И в случае успешного завершения вышеописанных операций дешифрирует ее, исполняет ее и формирует в свою очередь ответный информационный пакет, содержащий информацию об изменении состояния соответствующего насоса. При приеме ответного информационного пакета на диспетчерском пульте на семисегментные индикаторы выводятся номер принятой команды телесигнализации и номер ответившего ИП.
Проектируемую систему ТУ-ТС можно рассматривать как распределенную, так как один ДП управляет несколькими ИП, которые в свою очередь могут находиться на достаточном расстоянии как друг от друга, так и от самого ДП.
Принцип построения системы ТУ-ТС определяется в основном методом избирания и способом разделения элементов сигнала.
Известны три основных способа избирания: прямой (ПИ), групповой (ГИ) и комбинационный (КИ).
Элементы сигнала при любом методе избирания, как правило, разделяются либо по времени (ВР), либо по частоте (ЧР). Аппаратно проще реализовать временное разделение каналов, поэтому для нашей системы используем именно этот способ разделения. При этом каждый сигнал занимает свой временной интервал.
Методы избирания тесно связаны со структурой сигнала, т.е. с правилами его построения.
База сигнала – минимальное число элементов (импульсов частот), необходимых для передачи адресной и операционной информации в системах ТУ-ТС.
 При прямом избирании каждый элемент сигнала в пределах базы несет информацию о закрепленном за ним адресате или операции, а селекция адресата осуществляется непосредственным одноступенчатым включением исполнительной цепи.
При прямом избирании каждый элемент сигнала в пределах базы несет информацию о закрепленном за ним адресате или операции, а селекция адресата осуществляется непосредственным одноступенчатым включением исполнительной цепи.
При групповом избирании все объекты разбиваются на группы. Селекция адресата осуществляется в несколько ступеней: сначала выбирается группа, в которую относится объект, затем подгруппа и т.д. до выбора требуемой исполнительной цепи. При этом в структуре сигнала часть элементов будет нести информацию об операции, часть о номере группы, часть о номере подгруппы, а остальные о номере объекта в этой подгруппе.
При комбинационном избирании все элементы сигнала или его адресной
части являются кодовой комбинацией какого-либо кода, несущей информацию к закрепленному к этой комбинации адресату. Селекция исполнительной цепи осуществляется дешифрацией кодовой комбинации.
 Структура сигнала зависит не только от способа избирания, но и от типа системы. Если в системах телеуправления (ТУ) в большинстве случаев для повышения верности передачи информации сигнал строится по одноадресному (ОА) принципу, то в системах телесигнализации (ТС) довольно частот применяют многоадресную (МА), так называемую циркулярную структуру.
Структура сигнала зависит не только от способа избирания, но и от типа системы. Если в системах телеуправления (ТУ) в большинстве случаев для повышения верности передачи информации сигнал строится по одноадресному (ОА) принципу, то в системах телесигнализации (ТС) довольно частот применяют многоадресную (МА), так называемую циркулярную структуру.
Для сравнения структур сигналов используется критерий компактности, который учитывает одно из основных требований к структуре базового сигнала – получение максимальной емкости (числа команд) при минимальном числе элементов сигнала m.
m = ψ(NП, NКП, NO) Þ min, (1.1)
где NП = 2 – число операций управления или состояний объекта);
NКП = 9 – число исполнительных пунктов;
NО = 8 – число объектов на каждом ИП.
Для прямого способа избирания имеем:
mП = NП + NКП + NO = 2+9+8=19. (1.2)
Для группового способа избирания имеем:
mГ = NП + NКП + NГ + NOГ = 2+9+2,83+2,83=16.66, (1.3)
где  – число групп, на которые разбиты все объекты;
– число групп, на которые разбиты все объекты;
 – число объектов в группе.
– число объектов в группе.
Групповой выбор позволяет построить более компактный сигнал, но приводит к некоторому усложнению схемы общих узлов системы по сравнению с прямым способом избирания. Поэтому структура с групповым способом избирания используется в случае, если выполняется условие:
mП >> mГ. (1.4)
Как видно из соотношений (1.2) и (1.3) величины mП и mГ примерно одинаковы, что говорит о невыполнении соотношения (1.4).
 Следовательно, это обстоятельство в свою очередь говорит о неприменимости группового способа избирания. В качестве метода избирания будем использовать комбинационный метод.
Следовательно, это обстоятельство в свою очередь говорит о неприменимости группового способа избирания. В качестве метода избирания будем использовать комбинационный метод.
Для обеспечения синхронизации приемника и передатчика в формат команды специально вводится синхрокомбинация. Данное обстоятельство вводит ряд ограничений на пропускную способность канала, поскольку нужно передавать лишние биты информации. Преимущество такой реализации — в очевидном упрощении приемопередающей аппаратуры. Алгоритм работы системы полудуплексный. При такой организации связи в определенный момент времени возможна передача информации только в одном направлении (от ДП к ИП или наоборот). Одновременная передача информации в обоих направлениях исключена.
1.2 Формат команд ТУ-ТС
Определим формат команд телеуправления и телесигнализации. Команды будем кодировать двоичным кодом с контролем на четность, что позволит обнаружить нечетное число ошибок в переданном сообщении.
Определим количество разрядов в составе команд телеуправления и телесигнализации согласно формуле (1.5).
 , (1.5)
, (1.5)
где скобки ] [ означают округление до ближайшего большего целого;
K — количество сообщений;
N — требуемое количество разрядов для кодирования K сообщений.
Для передачи 16 команд телеуправления понадобится NТУ = 4 разряда. Для передачи 16 команд телесигнализации так же понадобится NТС = 4 разряда. На синхрокомбинацию отведем 4 разряда, т.е. NС = 4; обоснование данного выбора с точки зрения помехоустойчивости системы, а именно — вероятности формирования ложной синхрокомбинации, будет рассмотрено ниже. Для контроля четности выделим один разряд, т.е. NК = 1. Согласно техническому заданию проектируемая система включает в себя 9 исполнительных пунктов и всего один диспетчерский пункт.
Следовательно, в проектируемой системе достаточно задать 9 адресов (каждому исполнительному пункту) для возможности обмена информацией между диспетчерским пунктом и исполнительными пунктами. Для передачи 9 адресов понадобится 4 разряда.
В итоге имеем, что формат команд как ТУ, так и ТС будет состоять из четырех разрядов синхрокомбинации; четырех адресных разрядов; четырех разрядов, содержащих команду телеуправления или телесигнализации и одного разряда для контроля четности.
Таким образом, число разрядов команды телеуправления nТУ =13, число разрядов команды телесигнализации nТС = 13.
Формат команд ТУ и ТС представлен ниже:
Формат команды ТУ
| С | С | С | С | АИП | АИП | АИП | АИП | ТУ | ТУ | ТУ | ТУ | К |
Формат команды ТС
| С | С | С | С | АИП | АИП | АИП | АИП | ТС | ТС | ТС | ТС | К |
где  С — разряд синхрокомбинации;
С — разряд синхрокомбинации;
АИП – разряды адреса исполнительного пункта (для команды телеуправления это разряды адреса исполнительного пункта, которому отсылается команда телеуправления; для команды телесигнализации – это разряды адреса исполнительного пункта, от которого поступает команда телесигнализации на диспетчерский пункт);
ТУ — разряды команд телеуправления;
ТС — разряды команд телесигнализации;
К — разряд контроля кода на четность.
1.3 Выбор синхрокомбинации
Согласно ГОСТ вероятность ошибки приема команды телеуправления или телесигнализации составляет:
PОШ ПР КОМ = 10-21. (1.6)
Также согласно ГОСТ вероятность ошибки приема информационной части команды телеуправления или телесигнализации составляет:
РОШ ИНФО = 10-7. (1.7)
Тогда допустимая ошибка приема син  хрокомбинации определяется следующим образом:
хрокомбинации определяется следующим образом:
 . (1.8)
. (1.8)
Вероятность ошибочного приема информационной части команды телеуправления или телесигнализации РОШ ИНФО и вероятность ошибочного приема элементарного сигнала  связаны между собой следующим соотношением:
связаны между собой следующим соотношением:
 , (1.9)
, (1.9)
где n – количество разрядов информационной части команды.
Общий формат команд телеуправления и телесигнализации представлен в пункте 1.2. Отсюда видно, что как для команд телесигнализации, так и для команд телеуправления n=9.
С учетом того, что множитель  примерно равен 1, т.к. очень малая величина, то выражение (1.9) принимает вид:
примерно равен 1, т.к. очень малая величина, то выражение (1.9) принимает вид:
 . (1.10)
. (1.10)
Находим отсюда вероятность ошибочного приема элементарного сигнала:
 . (1.11)
. (1.11)
 . (1.12)
. (1.12)
Определим количество разрядов nСИНХР, отводимых под синхрокомбинацию и необходимых для того чтобы обеспечить допустимую вероятность ошибочного приема синхрокомбинации РОШ СИНХР = 10-14.
Вероятность ошибочного приема синхрокомбинации и вероятность ошибочного приема элементарного сигнала связаны между собой соотношением (1.13).
 . (1.13)
. (1.13)
Отсюда видно, что минимальное целое число, при котором будет выполнено равенство (1.13) равно 4  . Таким образом получаем, что количество разрядов синхрокомбинации равно 4, т.е.
. Таким образом получаем, что количество разрядов синхрокомбинации равно 4, т.е.
 . (1.14)
. (1.14)
2 УСЛОВИЯ ПРИЕМА ЭЛЕМЕНТАРНОГО СИГНАЛА
2.1 Определение скорости передачи сигнала
Каждая структура сигнала оценивается временем передачи всех ее элементов ТС в отведенной полосе частот ΔF. При временном разделении элементов базового сигнала время передачи определяется следующим образом:
 , (2.1)
, (2.1)
где  — длительность элементарной посылки, с;
— длительность элементарной посылки, с;
 — скорость передачи, бод;
— скорость передачи, бод;
 — время распространения сигнала по линии связи длиной L со скоростью V;
— время распространения сигнала по линии связи длиной L со скоростью V;
n — количество разрядов в информационном слове.
В нашем случае
n = 13. (2.2)
L = 103 км. (2.3)
V = 3∙104 км/с. (2.4)
Время распространения сигнала по линии связи:
 . (2.5)
. (2.5)
Согласно ТЗ имеем:
 |
ТС = 0,1с. (2.6)
Находим скорость передачи из выражения (2.1) и получаем:
 . (2.7)
. (2.7)
Используя стандартный ряд скоростей манипуляции выбираем ближайшую:
B = 200 бод. (2.8)
При этом время передачи команд ТУ и ТС согласно формуле (2.1) составит:
 . (2.9)
. (2.9)
Определим время передачи элементарной посылки:
t0 = 1/B = 1/200 = 5 мс. (2.10)
2.2 Спектр линейного сигнала
Рассмотрим спектр сигнала передаваемого по линии связи. Он должен удовлетворять следующим требованиям:
– ширина спектра не должна выходить за заданную полосу частот;
– параметры фильтра для выделения посылок должны быть физически реализуемы.
Первичный сигнал представляет собой последовательность прямоугольных импульсов длительностью t0 и амплитудой А (рисунок 2.1).

Рисунок 2.1 – Прямоугольн  ый импульс длительностью t0 и амплитудой А
ый импульс длительностью t0 и амплитудой А
Рассчитаем спектральную плотность одиночного импульса:

 . (2.11)
. (2.11)
С учетом, что амплитуда импульса А=1, получаем:
 . (2.12)
. (2.12)
Спектральная плотность одиночного прямоугольного импульса представлена на рисунке 2.2.

Рисунок 2.2 – Спектральн  ая плотность одиночного прямоугольного импульса
ая плотность одиночного прямоугольного импульса
Изобразим спектр амплитудно-манипулированного сигнала. Амплитудно-манипулированный сигнал представляет собой последовательность радиоимпульсов, разделенных паузами. Его можно рассматривать как произведение гармонического колебания с частотой w0 и колебания в виде последовательности прямоугольных импульсов длительностью t0 и амплитудой, равной единице.
При амплитудной манипуляции единица передается отрезком гармонического колебания, а нуль – сигналом постоянного тока с нулевым уровнем.
Амплитудно-манипулированный сигнал представлен на рисунке 2.3

Рисунок 2.3 – Амплитудно-манипулированный сигнал
В качестве несущей час  тоты возьмем частоту, примерно расположенную посередине разрешенного диапазона частот:
тоты возьмем частоту, примерно расположенную посередине разрешенного диапазона частот:
FНЕС = 2кГц. (2.13)
Для амплитудной манипуляции гармонического носителя эффективная ширина спектра определяется по формуле:
 , (2.14)
, (2.14)
где μ – коэффициент воспроизведения формы видеоимпульса, равный 0.8 … 1.5.
При μ = 1 получим: Fc = 2B = 2∙200 = 400 Гц.
Построим график спектральной плотности АМ сигнала при:
Fнес = 2 кГц, w0 = 2×p×Fнес = 12560 рад/с.
Одним из свойств преобразования Фурье является:
 . (2.15)
. (2.15)
С учетом выражения (2.12) получаем:
 . (2.16)
. (2.16)
 Спектральная плотность амплитудно-манипулированного сигнала представлена на рисунке 2.4.
Спектральная плотность амплитудно-манипулированного сигнала представлена на рисунке 2.4.

Рисунок 2.4 – Спектральная плотность амплитудно-манипулированного сигнала
3 Расчет помехоустойчивости системы
Помеха – посторонний электрический сигнал, который имеет параметры, соизмеримые с параметрами полезного сигнала.
Помехоустойчивость – в  нутреннее свойство сигнала или системы противодействовать действию помех.
нутреннее свойство сигнала или системы противодействовать действию помех.
3.1 Помехоустойчивость при непрерывной (флуктуационной) помехе
Непрерывная (флуктуационная) помеха на выходе передатчика – такое воздействие на приемник, когда длительность воздействия мала, но оно очень частое.
Спектр их шире полосы пропускания приемника. Воздействия этих помех накладываются друг на друга.
Пусть s(t) – полезный сигнал;
b(t) – помеха;
c(t) – суммарный сигнал на входе приемника.
Тогда имеем:
c(t) = s(t) + b(t). (3.1)
В простом бинарном канале вероятность ошибочной регистрации символа определяется выражением:
РОШ = PП[Р0Р(1/0) + Р1Р(0/1)], (3.2)
где Р0 и Р1 – априорные вероятности передачи нуля и единицы;
Р(1/0) и Р(0/1) – вероятности сбой нуля и единицы;
РП = вероятность появления помехи.
Для шумовой помехи:
РП = 1. (3.3)
Полагаем, что:
Р0 = Р1 = 0,5. (3.4)
Таким образом, для в  ероятности ошибочного приема имеем:
ероятности ошибочного приема имеем:
РОШ = 0,5PП[Р(1/0) + Р(0/1)]. (3.5)
Ошибочный прием при передаче нуля возможен в том случае, когда амплитуда помехи превысит пороговый уровень:
Р(1/0) = Р(В > А0). (3.6)
В данном случае ошибочный прием при передаче единицы возможен тогда, когда амплитуда смеси сигнала с помехой окажется меньше порогового уровня А0. Поэтому вероятность сбоя единицы равна вероятности того, что амплитуда смеси меньше величины порога, т.е.
Р(0/1) = Р(С < А0). (3.7)
В соответствии с принципом регистрации сигналов имеем:
 , (3.8)
, (3.8)
где  - закон распределения огибающей В (закон Рэлея).
- закон распределения огибающей В (закон Рэлея).
σ – мощность шумовой помехи.
 , (3.9)
, (3.9)
где  - закон распределения огибающей С смеси полезного сигнала s(t) и непрерывной помехи b(t) (закон Райса);
- закон распределения огибающей С смеси полезного сигнала s(t) и непрерывной помехи b(t) (закон Райса);
Sm – амплитуда полезного сигнала (на выходе передатчика);
s2 ¾ дисперсия;
I0(x) ¾ функция Бесселя нулевого порядка.
Введем следующие обозначения.
Относительный порог:
 . (3.10)
. (3.10)
Относительная величина вхо  дного сигнала:
дного сигнала:
 . (3.11)
. (3.11)
Относительная величина помехи:
 . (3.12)
. (3.12)
Отношение сигнал/шум:
 . (3.13)
. (3.13)
Теперь для шумового сигнала имеем:

 , (3.14)
, (3.14)
где 
Оптимальный порог, при котором значение F0 будет наименьшим:
 . (3.15)
. (3.15)
или
 . (3.16)
. (3.16)
При этом вероятность ошибочного приема будет зависеть только от h.
Если h ≥ 3, то распределение Райса становится близким к нормальному, в этом случае вероятность сбоя единицы:
 . (3.17)
. (3.17)
Воспользовавшись интегра  лом вероятности:
лом вероятности:
 . (3.18)
. (3.18)
Получаем, что:
 . (3.19)
. (3.19)
Зависимость помехоустойчивости от отношения сигнал/шум, рассчитанная по формуле (3.17), представлена на рисунке 3.1:

Рисунок 3.1 – Зависимость помехоустойчивости от отношения сигнал/шум
По графику зависимости Рош(h) (см. рисунок 3.1) найдем отношение сигнал/шум, соответствующее вероятности сбоя бита p0 = 5.27×10-5 (log10(p0) = -4.278):
h = 6; h2 = 36дБ
3.2 Помехоустойчивость при импульсной помехе

Импульсная помеха – кратковременное редкое воздействие.
Кратковременное означает, что спектр ее намного шире, чем длительность сигнала. Полоса пропускания приемника уже, чем спектр помехи.
Редкое означает, что приемник успевает отработать ее. Скорость передачи полезного сигнала намного больше. Помеха накладывается на полезный сигнал.
Интенсивность импульсной помехи определяется числом импульсов в секунду f. Согласно ТЗ среднее число импульсов помехи в секунду составляет:
f = 2,5 имп/с. (3.18)
Интенсивность импульсной помехи, приходящейся на полезный сигнал, который характеризуется длительностью τ0 (в нашем случае τ0 = 5мс) определяется как:
 . (3.19)
. (3.19)
Импульсная помеха подчиняется закону Пуассона. Вероятность ошибочного приема при этом равна:
 . (3.20)
. (3.20)
Для борьбы с импульсной помехой используется метод ШОУ, который подразумевает под собой ограничение сигнала на уровне номинального путем использования ограничителей на уровне номинального сигнала.
4 РАСЧЕТ ЛИНИИ ПЕРЕДАЧИ
Линия передачи – последовательное соединение усилительных участков.
Усилительный участок – отрезок кабеля с усилителем на конце.
Спроектировать линию передачи означает разбить ее на усилительные участки равной длины так, чтобы отношение сигнал/шум на ее выходе было не меньше требуемого. Одновременно вычисляется длина участка кабеля, затухание кабеля аi и усилителя Ai. Затухание усилителя выбирается так, чтобы результирующее затухание участка б  ыло равно нулю.
ыло равно нулю.
В качестве линии передачи выберем городской телефонный кабель с воздушно-бумажной изоляцией и с жилами диаметром 0,5мм.
Согласно ТЗ разрешенный для использования диапазон частот составляет 0.3-3.4кГц. В качестве несущей частоты выберем частоту, расположенную примерно посередине вышеприведенного диапазона частот. В качестве несущей частоты возьмем FНЕС = 2кГц.
Параметры выбранного кабеля на несущей частоте представлены в таблице 4.1
Таблица 4.1 – Параметры городского телефонного кабеля на частоте FНЕС = 2кГц
| Параметр кабеля | Значение параметра |
| Волновое сопротивление, Ом | 550 |
| Коэффициент затухания, дБ/км | 2,11 |
Зависимость уровня шума в кабельной магистрали в полосе 1 Гц от частоты представлена на рисунке 4.1:

Рисунок 4.1 – Уровень шума в кабельной магистрали в полосе 1 Гц
Как видно из рисунка 4.1 абсол  ютное значение спектральной плотности шума на несущей частоте FНЕС = 2кГц составляет примерно:
ютное значение спектральной плотности шума на несущей частоте FНЕС = 2кГц составляет примерно:
GШ АБ = -90дБ. (4.1)
Абсолютный уровень GАБ спектральной плотности связан с ее реальным значением G следующим соотношением:
 . (4.2)
. (4.2)
С учетом соотношений (4.1) и (4.2) находим значение спектральной плотности шума на несущей частоте FНЕС = 2кГц, выраженное в Вт/Гц:
 . (4.3)
. (4.3)
Определим величину мощности шума:
РШ = GШ ∙ΔF, (4.4)
где ΔF = 400Гц - полоса пропускания.
Таким образом:
РШ = 10-12 Вт/Гц ∙400Гц = 4∙10-10 Вт. (4.5)
Определим мощность сигнала, действующего на входе приемника:
РВХ = РШ·h2 = 4∙10-10·62 = 1,44∙10-8 Вт. (4.6)
Заметим, что мощность сигнала на выходе передатчика РВЫХ и мощность на входе приемника РВХ связаны между собой следующим соотношением:
 , (4.7)
, (4.7)
где g – коэффициент затухания;
LУЧ – длина участка линии связи.
Согласно ТЗ максимальная мощность сигнала на выходе передатчика равна:
РВЫХ = 1,024Вт. (4.8)
С учетом (4.7) и (4.8) находим длину уча  стка линии связи для обеспечения заданной мощности сигнала на входе приемника:
стка линии связи для обеспечения заданной мощности сигнала на входе приемника:
 . (4.9)
. (4.9)
Определим количество число усилительных участков NУЧ как:
 . (4.10)
. (4.10)
5 СТРУКТУРНАЯ И ФУНКЦИОНАЛЬНАЯ СХЕМЫ СИСТЕМЫ ТУ-ТС
5.1 Общая структура системы ТУ-ТС
Общая структура проектируемой системы ТУ-ТС включает в себя аппаратуру диспетчерского пункта (ДП), линию связи между аппаратурой диспетчерского пункта и аппаратурой исполнительных пунктов и саму аппаратуру исполнительных пунктов (ИП).
Каждая из выше перечисленных составных частей системы ТУ-ТС состоит в свою очередь из отдельных функциональных блоков.
Аппаратура диспетчерского пункта должна включать в себя следующие функциональные блоки: 
1) клавиатуру, необходимую оператору для набора команд, отсылаемых далее определенным исполнительным пунктам;
2) командный процессор, который осуществляет всю цифровую обработку информации. На диспетчерском пункте он организует взаимодействие с оператором;
3) дисплей, предназначенный для отображения отсылаемой команды. Данная проверка необходима для того, чтобы оператор убедился в том, что он не совершил ошибку при наборе команды. Также дисплей предназначен для отображения команд телесигнализации, поступающих на диспетчерский пункт с объекта управления;
4) устройство защиты от ошибок (УЗО), которое встраивается в микропроцессор и в простых системах осуществляет кодирование и декодирование информации;
5) линейное окончание (ЛОК), которое обеспечивает физическое согласование с линией связи, модуляцию и демодуляцию сигналов.
Аппаратура исполнительного пункта должна включать в себя следующие функциональные блоки:
1) устройство защиты от ошибок (УЗО), которое встраивается в микропроцессор и в простых системах осуществляет кодирование и декодирование информации;
2) линейное окончание (ЛОК), которое обеспечивает физическое согласование с линией связи, модуляцию и демодуляцию сигналов;
3) командный процессор, который осуществляет всю цифровую обработку информации. На исполнительном пункте он обеспечивает взаимодействие непосредственно с объектом управления;
С учетом всего вышесказанного структура системы ТУ-ТС принимает вид, представленный на рисунке 5.1.

 Рисунок 5.1 – Структура системы ТУ-ТС
Рисунок 5.1 – Структура системы ТУ-ТС
На рисунке 5.1:
LS – вход из линии связи;
L0 – выход в линию связи.
Цифровые автоматы диспетчерского пункта (ДП) и исполнительного пункта (ИП) можно рассматривать как два взаимодействующих автомата: операционный автомат (ОА) и управляющий автомат (УА).
5.2 Алгоритм работы системы ТУ-ТС
Аппаратура диспетчерского пункта должна:
1) обеспечить возможность диспетчеру осуществить набор номера команды ТУ, которая будет послана в линию связи;
2) закодировать команду ТУ, номер которой был набран в предыдущем пункте;
3) обеспечить возможность диспетчеру осуществить набор номера ИП, которому будет отправлена ранее набранная команда ТУ;
4) добавить к результату пункта 2) результат пункта 3);
5) добавить в результат пункта 4) бит проверки на четность;
6) записать полученный результат в регистр, из которого команда далее отсылается в линию связи;
7) добавить к результату пункта 5) синхрокомбинацию вида 1111;
8) послать команду в линию связи;
9) подготовиться к приему ответной и  нформации (команды телесигнализации). Если через промежуток времени tожид команда телесигнализации не поступила, то повторно послать эту же команду телеуправления в линию связи. Если и во второй раз команда телесигнализации не поступит на диспетчерский пункт, то вывести на дисплей сообщение “Ошибка передачи. Нарушена линия связи”. Затем перейти к пункту 15). Если команда телесигнализации поступила на диспетчерский пункт, то перейти к пункту 10);
нформации (команды телесигнализации). Если через промежуток времени tожид команда телесигнализации не поступила, то повторно послать эту же команду телеуправления в линию связи. Если и во второй раз команда телесигнализации не поступит на диспетчерский пункт, то вывести на дисплей сообщение “Ошибка передачи. Нарушена линия связи”. Затем перейти к пункту 15). Если команда телесигнализации поступила на диспетчерский пункт, то перейти к пункту 10);
10) выявить синхрокомбинацию команды телесигнализации;
11) осуществить прием кода команды телесигнализации из линии связи;
12) выявить и запомнить ошибки при приеме команды телесигнализации;
13) если ошибок нет, то записать ее в регистр. При наличии ошибок сохранить старую команду телесигнализации;
14) декодировать команду телесигнализации и результат вывести на дисплей диспетчерского пункта;
15) сброс аппаратуры диспетчерского пункта в исходное состояние.
Аппаратура исполнительного пункта должна:
1) выявить синхрокомбинацию передаваемой команды телеуправления;
2) осуществить прием кода команды телеуправления из линии связи;
3) выявить и запомнить ошибки при приеме команды телеуправления;
4) если ошибок нет, то запомнить принятую команду телеуправления, декодировать ее и в декодированном виде отправить на исполнительный пункт. При наличии ошибок продолжать выполнять предыдущую команду телеуправления;
5) сформировать, проанализировав состояние объекта управления, команду телесигнализации;
6) закодировать сформированную команду телесигнализации кодом с проверкой на четность. Записать результат в регистр, а затем передать ее в линию связи;
7) добавить к результату пункта 8) синхрокомбинацию вида 1111;
8) подготовиться к выполнению следующего цикла работы;
5.3 Выявитель синхрокомбинаций
Выявитель синхрокомбинаций (ВСК)  – цифровой автомат, предназначенный для выделения синхрокомбинаций из принимаемых команд телеуправления или телесигнализации.
– цифровой автомат, предназначенный для выделения синхрокомбинаций из принимаемых команд телеуправления или телесигнализации.
Он содержит в себе генератор периодической импульсной последовательности. Схема такого генератора периодической импульсной последовательности представлена на рисунке 5.2.

Рисунок 5.2 – Схема генератора периодической импульсной последовательности
Схема имеет два динамических состояния. В первом из них, когда на выходе D1.1 состояние лог. "1" (выход D1.2 лог. "0"), конденсатор С1 заряжается. В процессе заряда напряжение на входе инвертора D1.1 возрастает, и при достижении значения Uпор=0,5Uпит происходит скачкообразный переход во второе динамическое состояние, в котором на выходах D1.1 лог. "0", D1.2 - "1". В этом состоянии происходит перезаряд емкости (разряд) током обратного направления. При достижении напряжения на С1 Unop происходит возврат схемы в первое динамическое состояние. Резистор R2 является ограничительным, и его сопротивление не должно быть меньше 1 кОм, а чтобы он не влиял на расчетную частоту, номинал резистора R1 выбирается значительно больше R2 (R2<0,01R1). Ограничительный резистор (R2) иногда устанавливают последовательно с конденсатором.
При использовании неполярного конденсатора С1 длительность импульсов (tи) и пауза (tо) будут почти одинаковыми:
tи=to=0,7R1C1. (5.1)
Полный период:
T=1,4R1C1. (5.2)
Резистор R1 и конденсатор С1 могут находиться в диапаз  оне 20 к0м...10 МОм; 300 пф...100 мкФ.
оне 20 к0м...10 МОм; 300 пф...100 мкФ.
Временные диаграммы представлены на рисунке 5.3

Рисунок 5.3 – Временные диаграммы работы схемы, представленной на рисунке 5.2
Длительность следования импульсов синхронизации сделаем в 8 раз меньше периода следования посылок. То есть получаем:
 . (5.3)
. (5.3)
Выберем номинал резистора R2 из ряда номиналов Е24 равным:
R2 = 1,5кОм. (5.4)
Выберем номинал резистора R1 из ряда номиналов Е24 равным:
R1 = 160кОм. (5.5)
Определим мощность, рассеиваемую на сопротивлениях R1 и R2 соответственно.
 . (5.6)
. (5.6)
 . (5.7)
. (5.7)
Тогда с учетом соотношения (5.2) и значения (5.3) находим величину емкости конденсатора С1:
 . (5.8)
. (5.8)
Номинал емкости С1 выберем из ряда номиналов Е12 равным:
С1 = 5,6нФ. (5.9)
Выявитель синхрокомбинации имеет вход LS из линии связи и вход RES, необходимый для возвращения его в нулевое состояние после того, как ИП закончил свою работу. ВСК до  лжен вырабатывать выходной сигнал RDY при обнаружении нужной синхрокомбинации.
лжен вырабатывать выходной сигнал RDY при обнаружении нужной синхрокомбинации.
Временные диаграммы работы выявителя синхрокомбинаций представлены на рисунке 5.4.

Рисунок 5.4 – Временные диаграммы ВСК
Принцип работы ВСК заключается в следующем.
Он должен начать работу при появлении сигнала в линии связи и проверить наличие  в сигнале синхрокомбинации вида 1111 в определенные моменты времени. Этими моментами времени являются 4-й, 12-й, 20-й и 28-й импульсы генератора периодической импульсной последовательности. И при успешном обнаружении заданной синхрокомбинации ВСК должен при 32-ом импульсе генератора периодической импульсной последовательности выдать сигнал RDY=1.
в сигнале синхрокомбинации вида 1111 в определенные моменты времени. Этими моментами времени являются 4-й, 12-й, 20-й и 28-й импульсы генератора периодической импульсной последовательности. И при успешном обнаружении заданной синхрокомбинации ВСК должен при 32-ом импульсе генератора периодической импульсной последовательности выдать сигнал RDY=1.
Принципиальная схема ВСК представлена на рисунке 5.5.

Рисунок 5.5 – Принципиальная схема ВСК
Расшифруем смысл входных и выход  ных сигналов, приведенных на рисунке 5.5.
ных сигналов, приведенных на рисунке 5.5.
С – синхронизация счетчика ВСК и триггеров (сигнал с выхода генератора периодической импульсной последовательности ГПИП);
LS – сигнал из линии связи;
СТi – импульс i+1 синхросерии С;
RDY – сигнал успешного приема синхрокомбинации;
RES – сброс выявителя синхрокомбинации;
CLK1, CLK2 – синхросерии для ОА и УА.
Работа ВСК заключается в выявлении наличия в линии связи необходимой синхрокомбинации. В данном случае это 1111. Если данная синхрокомбинация будет успешно выявлена, то на выходе RDY появится сигнал, сообщающий об успешном принятии синхрокомбинации.
Первоначально автомат ВСК находится в нулевом состоянии 000. При появлении сигнала в линии связи автомат переходит в состояние 001. При этом вырабатывается сигнал RC сброса счетчика DD7 на выходе конъюнктора DD8.1.
Автомат ВСК срабатывает по переднему фронту импульса, а счетчик импульсов DD7 срабатывает по заднему фронту импульса. Этим устраняется неоднозначность в работе.
В состоянии 001 автомат ВСК находится до прихода синхроимпульса СТ3, который выделяется конъюнктором DD9.2 на выходе счетчика DD7. Поскольку синхроимпульс СТ3 формируется по спаду третьего импульса ГПИП, то рабочим для ВСК будет уже фронт четвертого импульса ГПИП. В этот момент времени автомат анализирует сигнал из линии связи. Если он равен единице, то автомат ВСК переходит в состояние 010, а если сигнал из линии связи равен нулю, то автомат ВСК возвращается в исходное нулевое состояние 000.
По спаду 8-го импульса ГПИП счетчик DD7 обнуляется. И начиная с заднего фронта 9-го импульса ГПИП, счетчик DD7 начинает счет импульсов заново.
В состоянии 010 автомат ВСК находится до прихода очередного синхроимпульса СТ3, который формируется по спаду 11-го импульса ГПИП. Рабочим для ВСК будет уже 12-ый импульс ГПИП. В этот момент времени автомат снова анализирует сигнал из линии связи. Если сигнал из линии связи равен единице, то автомат переходит в состояние 011, а если сигнал из линии связи равен нулю, то автомат возвращается в исходное нулевое состояние 000.
По спаду 16-го импульса ГПИП счетчик DD7 обнуляется. И начиная с заднего фронта 17-го импульса ГПИП, счетчик DD7 начинает счет импульсов заново.
В состоянии 011 автомат ВСК находится до прихода очередного синхроимпульса СТ3, который формируется по спаду  19-го импульса ГПИП. Рабочим для ВСК будет уже 20-ый импульс ГПИП. В этот момент времени автомат снова анализирует сигнал из линии связи. Если сигнал из линии связи равен единице, то автомат переходит в состояние 100, а если сигнал из линии связи равен нулю, то автомат возвращается в исходное нулевое состояние 000.
19-го импульса ГПИП. Рабочим для ВСК будет уже 20-ый импульс ГПИП. В этот момент времени автомат снова анализирует сигнал из линии связи. Если сигнал из линии связи равен единице, то автомат переходит в состояние 100, а если сигнал из линии связи равен нулю, то автомат возвращается в исходное нулевое состояние 000.
По спаду 24-го импульса ГПИП счетчик DD7 обнуляется. И начиная с заднего фронта 25-го импульса ГПИП, счетчик DD7 начинает счет импульсов заново.
В состоянии 100 автомат ВСК находится до прихода очередного синхроимпульса СТ3, который формируется по спаду 27-го импульса ГПИП. Рабочим для ВСК будет уже 28-ой импульс ГПИП. В этот момент времени автомат снова анализирует сигнал из линии связи. Если сигнал из линии связи равен единице, то автомат переходит в состояние 101, а если сигнал из линии связи равен нулю, то автомат возвращается в исходное нулевое состояние 000.
В состоянии 101 автомат находится до прихода синхроимпульса СТ7. Поскольку данный синхроимпульс СТ7 формируется по спаду 31-го импульса ГПИП, то рабочим для ВСК будет уже фронт 32-го импульса. В этот момент времени автомат переходит в состояние 110. При этом вырабатывается сигнал RDY – сигнал успешного приема синхрокомбинации.
Автомат ВСК находится в состоянии 110 до тех пор, пока идет обработка информации. Сигнал сброса ВСК RES формируется управляющим автоматом исполнительного или диспетчерского пункта по окончании своей работы. По приходу этого импульса автомат ВСК сбрасывается, переходя в исходное нулевое состояние 000.
Изобразим блок-схему, отображающую принци  п работы ВСК:
п работы ВСК:

Рисунок 5.6 – Блок-схема, отображающая принцип работы ВСК
 5.4 Аппаратура ИП
5.4 Аппаратура ИП
Функциональная схема цифрового автомата исполнительного пункта (ЦА ИП) представлена на рисунке 5.7.

Рисунок 5.7 – Функциональная схема ЦА ИП
На выше приведенной функциональной схеме приняты следующие сокращения:
LS – вход из линии связи;
L0 – выход в линию связи;
С – синхронизация триггеров и счетчика ВСК;
RES – сброс ВСК;
CLK1, CLK2 – синхросерии для операционного автомата (ОА) и управляющего автомата (УА) соответственно;
RDY – сигнал успешного приема синхрокомбинации;
RA – разрешение приема команды ТУ из ЛС для ОА;
SA – разрешение на передачу команды ТС в ЛС для ОА;
NEW – разрешение на запоминание новой принятой команды;
ERROR – сигнал наличия ошибки в принятой команде ТУ;
ADROK – сигнал соответствия переданного адреса адресу текущего ИП;
READ9 – сигнал об окончании приема команды ТУ из ЛС (принято 9 бит);
SEND13 – сигнал об окончании передачи команды ТС в ЛС (передано 13 бит);
При появлении сигнала в ЛС ВСК проверяет наличие необходимой синхрокомбинации (1111) для того, чтобы быть уверенным, что принимаемая информация это действительно команда ТУ, а не помеха. При этом вырабатывается сигнал RDY, сообщающий ОА об успешном приеме синхрокомбинации. С этого момента информация начинает проходит на вход сдвигающего регистра, преобразующего последовательный код в параллельный и работающий по переднему фронту тактового импульса CLK1. Одновременно с этим запускается счетчик, подсчитывающий количество принятых бит информации. В нашему случае нам необходимо принять 9 бит (4 бита адреса, 4 бита команды ТУ и 1 контрольны  й бит проверки на четность). После того, как счетчик отсчитает 9 принятых битов информации, формируется сигнал READ9=1. Данный сигнал воздействует на УА, который в свою очередь вырабатывает сигнал RA=0, запрещающий прохождение тактовых импульсов в приемный регистр.
й бит проверки на четность). После того, как счетчик отсчитает 9 принятых битов информации, формируется сигнал READ9=1. Данный сигнал воздействует на УА, который в свою очередь вырабатывает сигнал RA=0, запрещающий прохождение тактовых импульсов в приемный регистр.
С этого момента начинается обработка принятой информации.
Сначала проверяется соответствие 4 адресных разрядов принятой команды адресу ИП. Если адреса совпадут, то вырабатывается сигнал ADROK=1. Если же проверка адреса завершилась неудачей, то УА ИП вырабатывает сигнал RES=1, который сбрасывает ВСК и обработка принятой команды прекращается.
После этого осуществляется проверка принятой команды на четность. Если проверка на четность прошла успешно, то 4 разряда команды ТУ запоминаются в регистре, с выходов которого затем передаются на дешифратор команд, выходы которого подключены непосредственно к ОУ. Если же проверка на четность завершилась неудачей, то вырабатывается сигнал ERROR=1, соответствующий сигналу ошибки. При этом УА ИП вырабатывает сигнал RES=1, который сбрасывает ВСК и обработка принятой команды прекращается.
Далее УА ИП вырабатывает сигнал SA=1, разрешающий передачу команды ТС в ЛС. После того как счетчик отсчитает 13 бит посланной информации (4 бита синхрокомбинации, 4 адресных бита ИП, 4 бита команды ТС и 1 контрольный бит проверки на четность), то ОА ИП формирует сигнал SEND13=1, сигнализирующий об окончании передачи команды ТС в ЛС. После этого УА ИП формирует сигнал RES=1, который сбрасывает ВСК.
На этом рабочий цикл аппаратуры ИП прекращается.
Временные диаграммы работы аппаратуры ИП пре  дставлены на рисунке 5.8:
дставлены на рисунке 5.8:

Рисунок 5.8 – Временные диаграммы работы аппаратуры ИП
5.4.1 Операционный автомат ИП (ОА ИП) 
5.4.1.1 Приемник ОА ИП
Принципиальная схема приемника ОА ИП представлена на рисунке 5.9.

Рисунок 5.9 – Принципиальная схема приемника ОА ИП
Рассмотрим принцип работы приемника ОА ИП.
Сигнал из линии связи поступает на вход сдвигающего регистра DD13, который преобразует последовательный код в параллельный и работает по нарастающему фронту тактового импульса CLK1. Серия синхроимпульсов CLK1 проходит на вход данного сдвигающего регистра только после удачного приема синхрокомбинации выявителем синхрокомбинации (на входе RDY ОА ИП появится логическая единица). При этом сигнал RA, разрешающий прохождение синхроимпульсов в приемный регистр DD13, равен 1. Сигнал RA вырабатывается управляющим автоматом (УА).
Одновременно с этим при появлении сигнала RDY начинает свою работу счетчик DD14. Счетчик DD14 предназначен для подсч  ета принятых битов. В данном случае нам необходимо принять 9 бит (4 бита адреса, 4 бита команды телеуправления и 1 контрольный бит проверки на четность). Счетчик DD14 срабатывает по переднему фронту синхроимпульсов CLK1. После того как счетчик отсчитает 9 бит принятой информации, вырабатывается сигнал READ9=1, сигнализирующий об окончании приема. Сигнал READ9 выделяется конъюнктором DD15.1 на выходе счетчика. Этот сигнал воздействует на управляющий автомат исполнительного пункта (УА ИП), который вырабатывает сигнал RA=0. Данный сигнал закрывает логический ключ, реализованный на конъюнкторе DD8.3 и тем самым запрещает прохождение тактовых импульсов в приемный регистр DD13 и в счетчик DD14.
ета принятых битов. В данном случае нам необходимо принять 9 бит (4 бита адреса, 4 бита команды телеуправления и 1 контрольный бит проверки на четность). Счетчик DD14 срабатывает по переднему фронту синхроимпульсов CLK1. После того как счетчик отсчитает 9 бит принятой информации, вырабатывается сигнал READ9=1, сигнализирующий об окончании приема. Сигнал READ9 выделяется конъюнктором DD15.1 на выходе счетчика. Этот сигнал воздействует на управляющий автомат исполнительного пункта (УА ИП), который вырабатывает сигнал RA=0. Данный сигнал закрывает логический ключ, реализованный на конъюнкторе DD8.3 и тем самым запрещает прохождение тактовых импульсов в приемный регистр DD13 и в счетчик DD14.
С этого момента начинается обработка принятой информации.
Первоначально необходимо проверить предназначалась ли принятая команда телеуправления данному ИП. Для этого необходимо проверить соответствие четырех адресных разрядов принятого кода адресу данного ИП. Схема идентификации адреса построена на четырех элементах исключающее ИЛИ. Адрес исполнительного пункта задается при помощи четырех переключателей SW1, SW2, SW3 и SW4. Если все четыре адресных разряда соответствуют адресу ИП, то формируется сигнал ADROK=1, который выделяется конъюнктором DD15.2.
Контроль на четность реализована на микросхеме К561СА1 (13-разрядная схема контроля четности). Если проверка на четность прошла успешно, то на выходе Y данной микросхемы формируется низкий уровень сигнала. Если проверка на четность не прошла (нечетное количество пораженных битов принятой команды), то на выходе Y формируется высокий уровень сигнала, что соответствует сигналу ошибки ERROR.
Далее код принятой команды поступает на дешифратор команды ТУ DD18, выходы которого идут к ЗУ объекта управления. Данный дешифратор имеет четыре адресных входа А0, А1,  А2, А3, и 16 выходов.
А2, А3, и 16 выходов.
Каждый исполнительный пункт содержит по 8 ОУ (насосов), для каждого из которых предусмотрено две команды ТУ (включить и выключить). Для каждого насоса предусмотрено отдельное запоминающее устройство, реализованное на двухразрядном регистре. Запоминание команд в таких двухразрядных регистрах осуществляется при выработке со стороны УА сигнала NEW=1, разрешающего запомнить принятую команду. Таким образом команда 01 включает данный насос, а команда 10 выключает. Команда 00 не изменяет состояние насоса.
5.4.1.2 Передатчик ОА ИП
Принципиальная схе  ма передатчика ОА ИП представлена на рисунке 5.10:
ма передатчика ОА ИП представлена на рисунке 5.10:
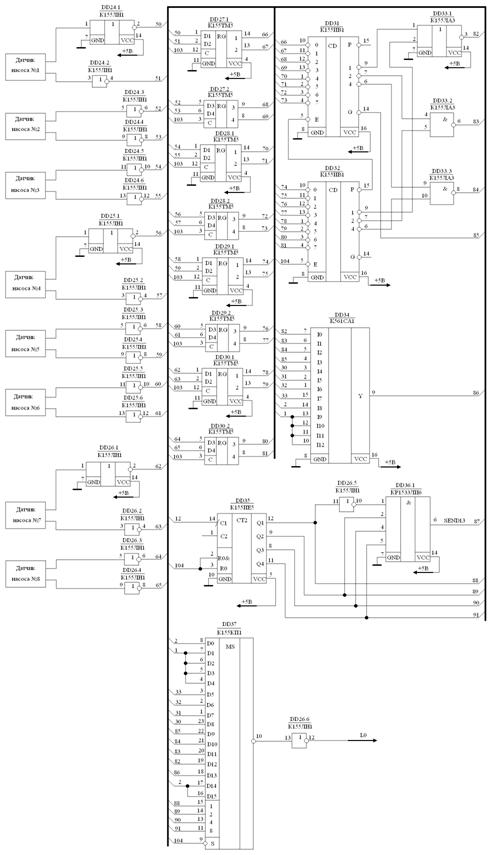
Рисунок 5.10 – Принципиальная схема передатчика ОА ИП
Рассмотрим принцип работы передатчика ОА ИП.
В случае если произошло изменение состояния  какого-либо ОУ, то соответствующий датчик регистрирует данное изменение и по переднему фронту импульса SA=1, разрешающего передачу команды ТС в ЛС, информация со всех датчиков ОУ запоминается в соответствующем ЗУ, реализованном на основе двухразрядного регистра. Если ОУ был включен, то на выходе датчика мы имеем 01, если был выключен, то на выходе соответствующего датчика мы имеем 10, а если же состояние датчика неизменно, то на выходе датчика мы имеем 00.
какого-либо ОУ, то соответствующий датчик регистрирует данное изменение и по переднему фронту импульса SA=1, разрешающего передачу команды ТС в ЛС, информация со всех датчиков ОУ запоминается в соответствующем ЗУ, реализованном на основе двухразрядного регистра. Если ОУ был включен, то на выходе датчика мы имеем 01, если был выключен, то на выходе соответствующего датчика мы имеем 10, а если же состояние датчика неизменно, то на выходе датчика мы имеем 00.
Далее информация с ЗУ всех ОУ поступает на вход приоритетного шифратора, собранного на микросхемах DD31, DD32 и DD33. Появление сигнала SA=1 разрешает работу микросхем DD31 и DD32. С учетом того, что микросхемы DD31 и DD32 имеют инверсные входы, то и на выходе датчиков ОУ мы используем инверторы.
При помощи 13-разрядной схемы контроля четности К561СА1 (DD34) формируем контрольный бит проверки на четность. Формирование данного бита осуществляется согласно следующему алгоритму. Если код, состоящий из 4 бит команды ТС и 4 бит адреса ИП содержит нечетное количество единиц, то контрольный бит проверки на четность равен 1, иначе данный бит равен 0.
После выдачи в ЛС 13 бит информации (4 бита синхрокомбинации, 4 бита адреса ИП, 4 бита команды ТС и 1 контрольный бит проверки на четность) вырабатывается сигнал SEND13=1, сообщающий об окончании передачи команды ТС в ЛС. Отсчет 13 бит информации осуществляется при помощи четырехразрядного счетчика DD35, который срабатывает по переднему фронту синхроимпульсов CLK1. До прихода со стороны УА ИП сигнала SA=1, разрешающего передачу команды ТС в ЛС, счетчик DD35 удерживается в нулевом состоянии. И только после прихода сигнала SA=1 начинает счет синхроимпульсов, поступающих на его вход. Сигнал SEND13=1 выделяется конъюнктором DD36.1 на выходе счетчика.
Последовательная передача команды ТС в ЛС осуществляется при помощи мультиплексора DD37, на адресные входы которого подаются сигналы с выхода счетчика. Тем самым при поступлении на вход счетчика DD35 очередного синхроимпульса, значение данного счетчика увеличивается на единицу. И при этом на выход мультиплексора поступает информация со следующего по порядку входа.
5.4.2 Управляющий автомат ИП  (УА ИП)
(УА ИП)
Принципиальная схема УА ИП представлена на рисунке 5.11:

Рисунок 5.11 – Принципиальная схема УА ИП
Рассмотрим принцип работы управляющего авт  омата исполнительного пункта (УА ИП).
омата исполнительного пункта (УА ИП).
Первоначально УА ИП находится в состоянии 000. После того, как счетчик DD14 ОА ИП отсчитает 9 бит принятой информации (4 бита адреса, 4 бита команды ТУ и один контрольный бит проверки на четность), со стороны ОА ИП вырабатывается сигнал READ9=1, который сигнализирует об окончании приема команды. Данный сигнал воздействует на УА ИП и переводит его в состояние 001. При этом со стороны УА ИП вырабатывается сигнал RA=0, который запрещает прохождение тактовых импульсов в приемный регистр.
Далее идет проверка совпадения 4-х адресных битов команды с адресом исполнительного пункта. Если данная проверка прошла успешно (принятая команда ТУ предназначалась именно данному ИП), то со стороны ОА ИП вырабатывается сигнал ADROK=1, который воздействует на УА ИП и переводит его в состояние 010. Если же проверка на совпадение адреса не прошла (принятая команда ТУ предназначалась другому ИП), то УА ИП переходит в состояние 101. При этом со стороны УА ИП формируется сигнал RES=1, который сбрасывает ВСК. При этом УА ИП возвращается в исходное нулевое состояние 000.
Далее автомат анализирует принятую команду на наличие ошибки путем проверки на четность. Если проверка на четность прошла успешно, т.е. ошибка отсутствует, то УА ИП переходит в состояние 011. При этом УА ИП формирует сигнал NEW=1, который разрешает запоминание принятой команды в двухразрядных регистрах DD20-DD23. В противном случае (проверка на четность не прошла) УА ИП переходит в состояние 101. При этом со стороны УА ИП формируется сигнал RES=1, который сбрасывает ВСК. При этом УА ИП возвращается в исходное нулевое состояние 000.
Далее УА ИП переходит в состояние 100. При этом формируется сигнал SA=1, разрешающий передачу команды ТС в ЛС. Данный сигнал выделяется конъюнктором DD42.3.
В состоянии 100 УА ИП находится до тех пор, пока не поступит сигнал SEND13=1, сообщающий о передаче 13 битов команды ТС в ЛС (4 бит синхрокомбинации, 4 адресных бита ИП, 4 бита команды ТС и 1 контрольный бит проверки на четность). После этого УА ИП переходит в состояние 101, где происходит выработка сигнала RES=1, который сбрасывает ВСК, а также счетчик DD14 приемной части ОА ИП И далее УА ИП возвращается в исходное нулевое состояние 000.
Блок-схема, описывающая работу ИП п  редставлена на рисунке 5.12.
редставлена на рисунке 5.12.

Рисунок 5.12 – Блок-схема работы ИП
5.5 Аппаратура ДП 
Функциональная схема цифрового автомата диспетчерского пункта (ЦА ДП) представлена на рисунке 5.13.

Рисунок 5.13 – Функциональная схема ЦА ДП
На выше приведенной функциональной схеме приняты следующие сокращения:
LS – вход из линии связи;
L0 – выход в линию связи;
С – синхронизация триггеров и счетчика ВСК;
RES – сброс ВСК;
CLK1, CLK2 – синхросерии для операционного автомата (ОА) и управляющего автомата (УА) соответственно;
RDY – сигнал успешного приема синхрокомбинации;
RA – разрешение приема команды ТС из ЛС для ОА;
SA – разрешение на передачу команды ТУ в ЛС для ОА;
NEW – разрешение на запоминание новой принятой команды ТС;
ERROR – сигнал наличия ошибки в принятой команде ТС;
ERSEND – сигнал отсутствия ответа со стороны ИП;
SEND13 – сигнал об окончании передачи команды ТУ в ЛС (передано 13 бит).
Номер отправляемой команды ТУ набирается на панели диспетчерского пункта при помощи соответствующих кнопок. При этом набираемый номер команды ТУ одновременно выводится на семисегментных индикаторах.
Номер ИП, которому необходимо отправить команду ТУ, набирается также при помощи соответствующих кнопок и одновременно выводится на семисегментном индикаторе. Кнопки и семисегментные индикаторы расположены на панели диспетчерского пункта. Далее по нажатию кнопки ”ПОСЫЛКА” данная команда ТУ посылается в линию связи. При этом со стороны ОА вырабатывается сигнал SEND13=1, сигнализирующий об окончании передачи команды ТУ в ЛС. Данный сигнал воздействует на УА ДП, со стороны которого вырабатывается сигнал SA=0, запрещающий передачу информации в ЛС.
ОА переходит в состояни  е ожидания поступления команды ТС со стороны ИП. Если через промежуток времени, равный tожид команда ТС не поступит, то команда ТУ посылается повторно. Если и во второй раз команда ТС не поступит на приемную часть ОА ДП по истечении промежутка времени, равного tожид, то загорается светодиод “Ошибка передачи. Нарушена линия связи” на панели ДП. При этом вырабатывается сигнал RES=1, который сбрасывает ВСК и возвращает автомат ДП в исходное состояние.
е ожидания поступления команды ТС со стороны ИП. Если через промежуток времени, равный tожид команда ТС не поступит, то команда ТУ посылается повторно. Если и во второй раз команда ТС не поступит на приемную часть ОА ДП по истечении промежутка времени, равного tожид, то загорается светодиод “Ошибка передачи. Нарушена линия связи” на панели ДП. При этом вырабатывается сигнал RES=1, который сбрасывает ВСК и возвращает автомат ДП в исходное состояние.
Если команда ТС поступит на ДП, то первоначально ВСК проверит наличие в линии связи необходимой синхрокомбинации (1111) для того, чтобы быть уверенным, что принимаемая информация это действительно команда ТС, а не помеха. При этом вырабатывается сигнал RDY, сообщающий ОА об успешном приеме синхрокомбинации. При этом управляющий автомат (УА) вырабатывает сигнал RA=1, разрешающий подачу тактовых импульсов в приемный регистр. С этого момента информация начинает проходит на вход сдвигающего регистра, преобразующего последовательный код в параллельный и работающий по переднему фронту тактового импульса CLK1. Одновременно с этим запускается счетчик, подсчитывающий количество принятых бит информации. В нашему случае нам необходимо принять 9 бит (4 бита адреса, 4 бита команды ТС и 1 контрольный бит проверки на четность). После того, как счетчик отсчитает 9 принятых битов информации, формируется сигнал READ9=1. Данный сигнал воздействует на УА, который в свою очередь вырабатывает сигнал RA=0, запрещающий прохождение тактовых импульсов в приемный регистр.
С этого момента начинается обработка принятой информации.
Сначала осуществляется проверка принятой команды на четность. Если проверка на четность прошла успешно, то адрес ответившего ИП и номер принятой команды ТС высвечиваются на семисегментных индикаторах, расположенных на панели ДП.
Если же проверка на четность завершилась неудачей, то вырабатывается сигнал ERROR=1, загорается светодиод “Ошибка при приеме команды ТС”. При этом УА ИП вырабатывает сигнал RES=1, который сбрасывает ВСК и обработка принятой команды прекращается.
На этом рабочий цикл аппаратуры ДП прекращается.
Как было сказано в  ыше, в качестве исполнительных пунктов рассматриваются машины-насосы, предназначенные для орошения полей. На каждом исполнительном пункте при этом установлено по восемь насосов. На панели диспетчерского пункта расположены 72 светодиода, которые предназначены для отображения состояния каждого из насосов на каждом исполнительном пункте. Напротив номеров насосов, которые в данный момент включены, горит светодиод.
ыше, в качестве исполнительных пунктов рассматриваются машины-насосы, предназначенные для орошения полей. На каждом исполнительном пункте при этом установлено по восемь насосов. На панели диспетчерского пункта расположены 72 светодиода, которые предназначены для отображения состояния каждого из насосов на каждом исполнительном пункте. Напротив номеров насосов, которые в данный момент включены, горит светодиод.
5.5.1 Операционный автомат ДП (О  А ДП)
А ДП)
5.5.1.1 Приемник ОА ДП
Принципиальная схема приемника ОА ДП представлена на рисунке 5.14:

Рисунок 5.14 – Принципиальная схема приемника ОА ДП


Рисунок 5.15 – Принципиальная схема приемника ОА ДП (продолжение)
Рассмотрим принцип работы приемника ОА ДП.
Сигнал из линии связи поступает на вход сдвигающего регистра DD13, который преоб  разует последовательный код в параллельный и работает по нарастающему фронту тактового импульса CLK1. Серия синхроимпульсов CLK1 проходит на вход данного сдвигающего регистра только после удачного приема синхрокомбинации выявителем синхрокомбинации (на входе RDY ОА ДП появится логическая единица). Сигнал RA вырабатывается управляющим автоматом (УА).
разует последовательный код в параллельный и работает по нарастающему фронту тактового импульса CLK1. Серия синхроимпульсов CLK1 проходит на вход данного сдвигающего регистра только после удачного приема синхрокомбинации выявителем синхрокомбинации (на входе RDY ОА ДП появится логическая единица). Сигнал RA вырабатывается управляющим автоматом (УА).
Одновременно с этим при появлении сигнала RDY начинает свою работу счетчик DD14. Счетчик DD14 предназначен для подсчета принятых битов. В данном случае нам необходимо принять 9 бит (4 бита адреса ИП, пославшего команду ТС, 4 бита команды телесигнализации и 1 контрольный бит проверки на четность). Счетчик DD14 срабатывает по переднему фронту синхроимпульсов CLK1. После того как счетчик отсчитает 9 бит принятой информации, вырабатывается сигнал READ9=1, сигнализирующий об окончании приема. Сигнал READ9 выделяется конъюнктором DD15.2 на выходе счетчика. Данный сигнал закрывает логический ключ, реализованный на конъюнкторе DD15.1 и тем самым запрещает прохождение тактовых импульсов в приемный регистр DD13 и в счетчик DD14. Таким образом фиксируется сигнал READ9=1.
С этого момента начинается обработка принятой информации.
Первоначально принятая команда проверяется на четность. Контроль на четность реализована на микросхеме К561СА1 (13-разрядная схема контроля четности). Если проверка на четность прошла успешно, то на выходе Y данной микросхемы мы имеем низкий уровень сигнала. Если проверка на четность не прошла (нечетное количество пораженных битов принятой команды), то на выходе Y мы имеем высокий уровень сигнала, что соответствует сигналу ошибки ERROR, при котором загорается красный светодиод VD1, сигнализирующий о наличии ошибки в принятой команде ТС.
Если же проверка на четность прошла успешно, то сохраняем принятую команду в регистрах DD22 и DD23. В регистр DD22 записываются четыре адресных бита принятой команды ТС, а в регистр DD23 – 4 бита самой команды ТС.
Далее выводим на семисегментные индикаторы номер ответившего ИП и номер принятой команды ТС.
Рассмотрим сначала вывод на семисегментный индикатор номер принятой команды ТС.
Заметим, что согласно техническому заданию количество исполнительных пунктов равно 9. Следовательно, двоичный код, содержащий номер ответившего ИП совпадает с двоично-десятичным кодом  . Четыре адресных бита принятой команды ТС преобразуем в код семисегментного индикатора при помощи микросхемы К155ПП5 (DD16). И далее выводим результат на семисегментном индикаторе VD2.
. Четыре адресных бита принятой команды ТС преобразуем в код семисегментного индикатора при помощи микросхемы К155ПП5 (DD16). И далее выводим результат на семисегментном индикаторе VD2.
Далее выводим на семисегментный индикатор номер ответившего ИП.
Для этого прежде всего двоичный код, состоящий из четырех бит принятой команды ТС, преобразуем в двоично-десятичный код при помощи микросхемы К155ПР7 (DD68). Работа микросхемы К155ПР7 разрешается (путем подачи на вход разрешения F логического 0) только при одновременном выполнении двух условий:
1) счетчик DD14 отсчитает 9 бит принятой информации;
2) проверка на четность принятой команды ТС прошла успешно (на выходе микросхемы DD20 логический ноль).
Младший разряд (разряд единиц) передается мимо микросхем, так как он совпадает в двоично-десятичном и двоичном кодах.
Далее при помощи микросхемы К155ПП5 полученные двоично-десятичный код преобразуем в код семисегментного индикатора.
И далее выводим результат на семисегментных индикаторах VD3 и VD4.
В качестве исполнительных пунктов рассматриваются машины-насосы, предназначенные для орошения полей. На каждом исполнительном пункте при этом установлено по восемь насосов. На панели диспетчерского пункта расположены 72 светодиода (VD5-VD76), которые предназначены для отображения состояния каждого из насосов на каждом исполнительном пункте. Напротив номеров насосов, которые в данный момент включены, горит светодиод.
Для нормирования тока элементов индикаторов и светодиодов VD5-VD76 между ними и выводами микросхем включены ограничительные резисторы.
Номинальный ток элементов семисегментного индикатора АЛС324А равен 20мА.
Определим величину сопротивления R5-25 каждого из нагрузочных резисторов (R5-R25), включенных между элементами индикаторов и выводами микросхем К155ПП5.

 . (5.10)
. (5.10)
Выберем номинал сопротивлений R  5-R25 из ряда номиналов Е24 равным:
5-R25 из ряда номиналов Е24 равным:
R5-25 = 270Ом. (5.11)
Определим мощность, рассеиваемую на сопротивлении R5-R25:
 . (5.12)
. (5.12)
Номинальный ток светодиода АЛ307БМ равен 10мА.
Определим величину сопротивления R4 являющегося нагрузочным резистором для светодиода VD1.
 . (5.13)
. (5.13)
Выберем номинал сопротивления R4 из ряда номиналов Е24 равным:
R4 = 510Ом. (5.14)
Определим мощность, рассеиваемую на сопротивлении R4:
 . (5.15)
. (5.15)
Номинальный ток светодиода АЛ307ВМ равен 20мА.
Определим величину сопротивления R26-97 каждого из нагрузочных резисторов (R26-R97), включенных между светодиодами АЛ307ВМ и выводами микросхем К564ТР2.
 . (5.16)
. (5.16)
Выберем номинал сопротивлений R26-R97 из ряда номиналов Е24 равным:
R26-97 = 270Ом. (5.17)
Определим мощность, рассеиваемую на сопротивлении R26-R97:
 . (5.18)
. (5.18)
5.5.1.2 Передатчик ОА ДП
Принципиальная схема передатчика ОА ДП  представлена на рисунке 5.16:
представлена на рисунке 5.16:

Рисунок 5.16 – Принципиальная схема передатчика ОА ДП
Набор номера ИП и номера команды ТУ осуществляется с пульта ДП при помощи двух кнопок, одна из которых при каждом нажатии увеличивает, а другая уменьшает номер. Одновременно набираемый номер выводится на семисегментный индикатор.
Рассмотрим набор номера ИП, которому будем осуществлять посылку команды ТУ. При нажатии на кнопку SA1 значение счетчика DD44 увеличивается на единицу (номер ИП увеличивается на 1). А при каждом нажатии на кнопку SA2 мы уменьшаем значение счетчика DD44 на 1 (номер ИП уменьшается на 1). Двоичный код с вых  ода данного счетчика поступает на микросхему DD48, которая преобразует данный двоичный код в код семисегментного индикатора VD77, на котором и отображается вводимый номер ИП.
ода данного счетчика поступает на микросхему DD48, которая преобразует данный двоичный код в код семисегментного индикатора VD77, на котором и отображается вводимый номер ИП.
Рассмотрим набор номера передаваемой команды ТУ. При нажатии на кнопку SA3 значение счетчика DD45 увеличивается на единицу (номер команды ТУ увеличивается на 1). А при каждом нажатии на кнопку SA4 мы уменьшаем значение счетчика DD45 на 1 (номер команды ТУ уменьшается на 1). Двоичный код с выхода данного счетчика поступает на микросхему DD49, которая преобразует данный двоичный код в двоично-десятичный код. Младший разряд (разряд единиц) передается мимо микросхем, так как он совпадает в двоично-десятичном и двоичном кодах. Далее при помощи микросхемы К155ПП5 полученные двоично-десятичный код преобразуем в код семисегментного индикатора. И далее выводим результат на семисегментных индикаторах VD78 и VD79.
Затем при помощи 13-разрядной схемы контроля четности К561СА1 (DD46) формируем контрольный бит проверки на четность. Формирование данного бита осуществляется согласно следующему алгоритму. Если код, состоящий из 4 бит команды ТУ и 4 бит адреса ИП содержит нечетное количество единиц, то контрольный бит проверки на четность равен 1, иначе данный бит равен 0.
Далее запоминаем нашу команду ТУ в двух шестиразрядных регистрах DD52 и DD53. В регистре DD52 запоминаем набранный номер ИП, которому будет послана команда ТУ. В регистре DD53 запоминаем номер команды ТУ и контрольный бит проверки на четность.
После выдачи в ЛС 13 бит информации (4 бита синхрокомбинации, 4 бита адреса ИП, 4 бита команды ТУ и 1 контрольный бит проверки на четность) вырабатывается сигнал SEND13=1, сообщающий об окончании передачи команды ТУ в ЛС. Отсчет 13 бит информации осуществляется при помощи четырехразрядного счетчика DD54, который срабатывает по переднему фронту
синхроимпульсов CLK1. До прихода со стороны УА ДП сигнала SA=1, разрешающего передачу команды ТУ в ЛС, счетчик DD54 удерживается в нулевом состоянии. И только после прихода сигнала SA=1 начинает счет синхроимпульсов, поступающих на его вход. Сигнал SEND13=1 выделяется конъюнктором DD55.1 на выходе счетчика.
Последовательная передача команды ТУ в ЛС осуществляется при помощи мультиплексора DD47, на адресные входы которого подаются сигналы с выхода счетчика. Тем самым при поступлении  на вход счетчика DD54 очередного синхроимпульса, значение данного счетчика увеличивается на единицу. И при этом на выход мультиплексора поступает информация со следующего по порядку входа.
на вход счетчика DD54 очередного синхроимпульса, значение данного счетчика увеличивается на единицу. И при этом на выход мультиплексора поступает информация со следующего по порядку входа.
Номинальный ток элементов семисегментного индикатора АЛС324А равен 20мА.
Определим величину сопротивления R98-118 каждого из нагрузочных резисторов (R98-R118), включенных между элементами индикаторов и выводами микросхем К155ПП5.
 . (5.19)
. (5.19)
Выберем номинал сопротивлений R98-118 из ряда номиналов Е24 равным:
R98-118 = 270Ом. (5.20)
Определим мощность, рассеиваемую на сопротивлениях R98-118:
 . (5.21)
. (5.21)
5.5.2 Управляющий автомат ДП (УА ДП)
Принципиальная схема УА ДП представ  лена на рисунке 5.17:
лена на рисунке 5.17:

Рисунок 5.17 – Принципиальная схема УА ДП
УА ДП в своем составе содержит таймер К  Р1006ВИ1. Применение таймера необходимо для следующих целей. После посылки команды ТУ со стороны УА ДП вырабатывается сигнал RA=1, разрешающий прием команды ТС из ЛС. Если через промежуток времени tожид команда телесигнализации не поступила на диспетчерский пункт, то ДП повторно посылает эту же команду телеуправления в линию связи.
Р1006ВИ1. Применение таймера необходимо для следующих целей. После посылки команды ТУ со стороны УА ДП вырабатывается сигнал RA=1, разрешающий прием команды ТС из ЛС. Если через промежуток времени tожид команда телесигнализации не поступила на диспетчерский пункт, то ДП повторно посылает эту же команду телеуправления в линию связи.
Если и во второй раз команда телесигнализации не поступит на диспетчерский пункт, то загорается светодиод “Ошибка передачи. Нарушена линия связи”.
Согласно техническому заданию время передачи одной команды составляет 0,1с. Таким образом время ожидания выберем равным tожид = 0,3с (0,1с на передачу команды ТУ; 0,1с на передачу команды ТС и 0,1с которая связана с наличием задержки в срабатывании микросхем).
При таком способе включения таймера КР1006ВИ1 на его выходе имеем периодическую импульсную последовательность с периодом:
Т=2 R119 C2 ln2. (5.22)
Примем, что Т = tожид/10 = 0,03с.
Выберем номинал емкости С2 из ряда номиналов Е6:
С2 = 1мкФ. (5.23)
Находим величину сопротивления R119:
 . (5.24)
. (5.24)
Выберем номинал сопротивления R119 из ряда номиналов Е24 равным:
R119 = 22кОм. (5.25)
Определим мощность рассеивания на сопротивлении R119:
 . (5.26)
. (5.26)
При этом заметим, что длительность импульса равна:
tИ = Т/2 = 0,015с. (5.27)
 |
Первоначально УА ДП находится в состоянии 000. После нажатия на диспетчерском пункте кнопки “ПОСЫЛКА” (SA5) УА ДП переходит в состояние 001. При этом со стороны УА ДП вырабатывается сигнал SA=1, разрешающий передачу команды ТУ в линию связи, который выделяется конъюнктором DD38.1.
В состоянии 001 автомат находится до прихода сигнала SEND13=1 со стороны передатчика ОА ДП, информирующий об окончании передачи команды ТУ в ЛС. При этом УА ДП переключается в состояние 010. При этом со стороны УА ДП вырабатывается сигнал RA=1, разрешающий прием команды ТС из ЛС. Одновременно с этим разрешается работа счетчика DD61 путем снятия со входов сброса сигнала высокого уровня. Счетчик DD61 работает по нарастающему фронту импульсов, вырабатываемых со стороны таймера КР1006ВИ1.
Как только счетчик DD61 досчитает до 11 (как раз пройдет время примерно равное 10 tожид) проверяется наличие сигнала READ9=1, сигнализирующего и приеме 9 бит информации (4 бит адреса ИП, 4 бит команды ТС и 1 контрольного бита проверки на четность). Если этот сигнал присутствует, то автомат переключается в состояние 011.
Далее принятая команда проверяется на четность. Если проверка на четность прошла успешно, то автомат переходит в состояние 100, при котором вырабатывается сигнал NEW=1, разрешающий запись принятой команды в регистры DD22 и DD23. В регистр DD22 записываются четыре адресных бита принятой команды ТС, а в регистр DD23 – 4 бита самой команды ТС.
Затем автомат переходит в состояние 110, при котором вырабатывается сигнал сброса ВСК RES=1.
Если по истечении промежутка времени, равного tожид сигнал READ9=1 отсутствует, то автомат переходит в состояние 001 для повторной передачи команды ТУ. Если и при повторной попытке сигнал READ9=1 отсутствует, то автомат переходит в состояние 101, при котором вырабатывается сигнал ERSEND=1, сигнализирующий об ошибке при передаче команды ТУ. Появление сигнала ERSEND=1 приводит к загоранию светодиода VD80 на панели диспетчерского пункта.
Для подсчета количества попыток посылки команды ТУ используется счетчик DD63.
Затем автомат переходит в состояние 110, при котором вырабатывается сигнал сброса ВСК RES=1.
Номинальный ток светодиода АЛ307Б  М равен 10мА.
М равен 10мА.
Определим величину сопротивления R120 являющегося нагрузочным резистором для светодиода VD80.
 . (5.28)
. (5.28)
Выберем номинал сопротивления R120 из ряда номиналов Е24 равным:
R120 = 510Ом. (5.29)
Определим мощность, рассеиваемую на сопротивлении R120:
 . (5.30)
. (5.30)
Блок-схема, описывающая работу ДП п  редставлена на рисунке 5.18.
редставлена на рисунке 5.18.

Рисунок 5.18 – Блок-схема работы ДП

 |
Рисунок 5.19 – Блок-схема работы ДП (продолжение)
5.6 Внешний вид панели ДП
Внешний вид панели диспетчерского пункта представлен на рисунке 5.19.

Рисунок 5.19 – внешний вид панели диспетчерского пункта
Пульт ДП представляет собой панель, состоящую из трех частей.
Первая часть. В качестве исполнительных пунктов рассматриваются машины-насосы, предназначенны  е для орошения полей. На каждом исполнительном пункте при этом установлено по восемь насосов. На панели диспетчерского пункта расположены 72 светодиода, которые предназначены для отображения состояния каждого из насосов на каждом исполнительном пункте. Напротив номеров насосов, которые в данный момент включены, горит светодиод.
е для орошения полей. На каждом исполнительном пункте при этом установлено по восемь насосов. На панели диспетчерского пункта расположены 72 светодиода, которые предназначены для отображения состояния каждого из насосов на каждом исполнительном пункте. Напротив номеров насосов, которые в данный момент включены, горит светодиод.
Вторая часть представляет собой панель набора адреса ИП и команды ТУ. Ввод номера ИП и команды ТУ осуществляется при помощи кнопок  и
и  , и индикаторов. Кнопки имеют ряд преимуществ перед галетными переключателями. Они позволяют быстро и безошибочно вводить команды ТУ. При этом упрощается схема клавиатуры ДП. Там же размещена кнопка “Посылка”. Если со стороны ИП, которому была послана команда ТУ, не отвечает, то зажигается светодиод “Ошибка передачи. Нарушена линия связи.”.
, и индикаторов. Кнопки имеют ряд преимуществ перед галетными переключателями. Они позволяют быстро и безошибочно вводить команды ТУ. При этом упрощается схема клавиатуры ДП. Там же размещена кнопка “Посылка”. Если со стороны ИП, которому была послана команда ТУ, не отвечает, то зажигается светодиод “Ошибка передачи. Нарушена линия связи.”.
Третья часть представляет собой панель приемника команд ТС. При обнаружении ошибки в  принятой команде ТС зажигается светодиодный индикатор “Ошибка при приеме ТС”. Адрес ответившего ИП и команда ТС высвечивается на семисегментном индикаторе.
принятой команде ТС зажигается светодиодный индикатор “Ошибка при приеме ТС”. Адрес ответившего ИП и команда ТС высвечивается на семисегментном индикаторе.
6 ЛИНЕЙНОЕ ОКОНЧАНИЕ
6.1 Структура линейного окончания
 |
ЛОК производит физическое согласование аппаратуры диспетчерского пункта (ДП) и исполнительного пункта (ИП) с линией связи, осуществляет модуляцию и демодуляцию АМ сигналов и фильтрацию сигналов на входе приемника.
ЛОК одинаково как для ИП, так и для ДП. Т.е. ЛОК только передает и принимает сигналы, независимо от их смыслового значения.
Передающая часть ЛОК на основе сигнала от цифровых автоматов формирует АМ сигнал и выдает его в ЛС, а также согласует выход передающего устройства с ЛС. Передающая часть ЛОК выдает в линию связи сигнал при высоком уровне сигнала разрешения передачи SA.
Приемная часть ЛОК должна иметь высокое входное сопротивление во время ожидания сигнала. Усилитель сигнала усиливает сигнал до необходимого уровня. Приемная часть ЛОК всегда находится в режиме приёма.
Структурная схема ЛОК приведена на рисунке 6.1.

Рисунок 6.1 – Структурная схема ЛОК
На рисунке 6.1 введены следующие обозначения:
1 – генератор гармонических колебаний;
2 – модулятор АМ сигналов;
3 – предварительный усилитель (ПУ);
4 – усилитель мощности (УМ);
5 – полосовой фильтр (ПФ);
6 – согласующее устройство;
7 – двусторонний ограничитель;
8 – амплитудный детектор;
9 – фильтр нижних частот (ФНЧ);
10 – преобразовательное устройство.
6.2 Амплитудный модулятор
Амплитудную модуляцию будем осуществлять при помощи генератора гармонических коле  баний и ключа (рисунок 6.2). В качестве ключа используем микросхему КР590КН9, генератор выполним на микросхеме XR8038ACP. На управляющий вход ключа подается кодовая комбинация передаваемой команды, а на информационный – колебания с генератора с частотой, равной несущей частоте. При этом ключ находится в замкнутой состоянии, если на управляющий вход ключа приходит высокий уровень сигнала. Навесные элементы R1 и C1 позволяют задавать требуемую частоту гармонических колебаний сигнала.
баний и ключа (рисунок 6.2). В качестве ключа используем микросхему КР590КН9, генератор выполним на микросхеме XR8038ACP. На управляющий вход ключа подается кодовая комбинация передаваемой команды, а на информационный – колебания с генератора с частотой, равной несущей частоте. При этом ключ находится в замкнутой состоянии, если на управляющий вход ключа приходит высокий уровень сигнала. Навесные элементы R1 и C1 позволяют задавать требуемую частоту гармонических колебаний сигнала.

Рисунок 6.2 – Схема модулятора АМ сигнала
Номинал емкости С1 выберем из ряда номиналов Е12 равным:
С1 = 1нФ. (6.1)
Частота гармонических колебаний, формируемых генератором, собранным на основе микросхемы XR8038ACP, определяется согласно соотношению (6.2).
 . (6.2)
. (6.2)
Согласно соотношению (2.13) несущая частота, т.е. частота гармонических колебаний генератора, построенного на микросхеме XR8038ACP, равна 2кГц. С учетом этого и соотношению (6.1) и (6.2) находим величину сопротивления R1.
 . (6.3)
. (6.3)
Определим мощность рассеивания на сопротивлении R1.
 . (6.4)
. (6.4)
Величина сопротивления R2 являетс  я номинальной и равна 1МОм. Сопротивление R2 предназначено для уменьшения искажений выходных гармонических колебаний генератора.
я номинальной и равна 1МОм. Сопротивление R2 предназначено для уменьшения искажений выходных гармонических колебаний генератора.
6.3 Предварительный усилитель и усилитель мощности
Схема предварительного усилителя и усилителя мощности представлена на рисунке 6.3. Схема состоит из предварительного усилителя, построенного на операционном усилителе, и оконечного каскада, являющегося усилителем мощности, охваченных цепью общей отрицательной обратной связи. В качестве оконечного каскада рассматриваетя двухтактный эмиттерный повторитель. Конденсатор С2 предназначен для подавления постоянной составляющей во входном сигнале предварительного усилителя.

Рисунок 6.3 – Схема предварительного усилителя и усилителя мощности
6.4 Фильтр нижних частот (ФНЧ)
Принципиальная схема ФНЧ представлена на рисунке 6.4.

Рисунок 6.4 – Принципиальная схема ФНЧ
6.5 Полосовой фильтр (ПФ)
Принципиальная схема ПФ представлена на рисунке 6.5.

Рисунок 6.5 – Принципиальная схема ПФ 
Рассчитаем номиналы навесных элементов пол  осового фильтра.
осового фильтра.
Как было найдено в пункте 2.2, несущая частота FНЕС и ширина полосы пропускания ΔF соответственно равны
FНЕС = 2кГц. (6.5)
ΔF = 400Гц. (6.6)
Отсюда следует, что нижняя FНИЖ и верхняя FВЕРХ границы полосы пропускания полосового фильтра соответственно равны:
FНИЖ = 1,8кГц. (6.7)
FВЕРХ = 2,2кГц. (6.8)
Номиналы навесных элементов С5 и R11 связаны со значением нижней границы полосы пропускания фильтра соотношением (6.9)
 . (6.9)
. (6.9)
Номинал емкости С5 выбираем из ряда номиналов Е12 равным
С5 = 10нФ. (6.10)
Тогда из соотношения (6.9) находим величину сопротивления R11
 . (6.11)
. (6.11)
Номинал сопротивления R11 выбираем из ряда номиналов Е24 равным
R11 = 9,1кОм. (6.12)
Номиналы навесных элементов С6 и R12 связаны со значением верхней границы полосы пропускания фильтра соотношением (6.13)
 . (6.13)
. (6.13)
Номинал емкости С6 выбираем из ряда номинал  ов Е12 равным
ов Е12 равным
С6 = 10нФ. (6.14)
Тогда из соотношения (6.13) находим величину сопротивления R11
 . (6.15)
. (6.15)
Номинал сопротивления R12 выбираем из ряда номиналов Е24 равным
R12 = 7,5кОм. (6.16)
Выбираем ОУ.
Положим, что коэффициент передачи полосового фильтра Кф = 1.
Для выбираемого ОУ частота единичного усиления f1 должна удовлетворять условию:
 . (6.17)
. (6.17)
В качестве такого ОУ выбираем 140УД11.
Схема включения данного ОУ представлена на рисунке 6.6.

Рисунок 6.6 – Схема включения ОУ 140УД11
Основные параметры ОУ 140УД11 п  редставлены в таблице 6.1.
редставлены в таблице 6.1.
Таблица 6.1 – Основные параметры ОУ 140УД11
| Параметр | Обозначение | Значение |
| Коэффициент усиления по напряжению | KU | 25∙103 |
| Напряжение смещения нуля | UСМ, мВ | 5 |
| Частота единичного усиления | f1, МГц | 15 |
| Входной ток | IВХ, мкА | 0.5 |
| Разность входных токов | ∆ IВХ, мкА | 0.2 |
| Скорость нарастания выходного сигнала | VU, В/мкс | 50 |
| Коэффициент ослабления синфазного сигнала | КОС. СФ, дБ | 70 |
| Максимальное выходное напряжение | UВЫХ. max, В | 12 |
| Максимальное входное синфазное напряжение | UСФ. ВХ. MAX, В | 10 |
| Напряжение питания | UПИТ, В | 15 |
| Ток, потребляемый от источника питания | IП, мА | 8 |
6.6 Двусторонний ограничитель
Принципиальная схема двустороннего ограничителя представлена на рисунке 6.7.

Рисунок 6.7 – Принципиальная схема двустороннего ограничителя
6.7 Амплитудный детектор
Принципиальная схема амплитудного детектора представлена на рисунке 6.8.

Рисунок 6.8 – Принципиальная схема амплитудного детектора
6.8 Преобразовательное устройство
Принципиальная схема преобразовательного устройства представлена на рисунке 6.9.

Рисунок 6.9 – Принципиальная схема преобразовательного устройства
 Преобразовательное устройство представляет собой триггер Шмитта, реализованный на микросхеме К155ТЛ1. Данная микросхема сочетает в одном корпусе два триггера Шмитта. С учетом, что выход микросхемы К155ТЛ1 инверсный, то к выходу данной микросхемы подключаем дополнительно инвертор К155ЛН1.
Преобразовательное устройство представляет собой триггер Шмитта, реализованный на микросхеме К155ТЛ1. Данная микросхема сочетает в одном корпусе два триггера Шмитта. С учетом, что выход микросхемы К155ТЛ1 инверсный, то к выходу данной микросхемы подключаем дополнительно инвертор К155ЛН1.
6.9 Согласующее устройство
Согласующее устройство построим на основе коммутатора DD1 и трансформатора T1. Схема согласующего ус  тройства приведена на рисунке 6.10.
тройства приведена на рисунке 6.10.
Коммутатор выполним на микросхеме КР590КН9, содержащей в одном корпусе 2 ключа. Каждый аналоговый ключ имеет малое сопротивление в открытом состоянии (меньше 10 Ом) и малый ток коммутации (не более 10 мА). Вход одного ключа соединен с приемником, а другого – с передатчиком. Закрывание ключа осуществляется подачей на вход управления сигнала высокого уровня.
Выходная обмотка трансформатора T1 нагружена на сопротивление R1, которое выбирается таким образом, чтобы выходное сопротивление передатчика равнялось сопротивлению нагрузки Rн. Это позволяет согласовать передатчик с ЛС.

Рисунок 6.10 – Схема согласующего устройства
ЗАКЛЮЧЕНИЕ
В результате проделанной работы была разработана телемеханическая система передачи команд управления и контроля АМ сигналом по симметричному кабелю. Данная система включает в себя диспетчерский пункт, с пульта которого осуществляется управление 9-ю исполнительными пунктами. Она обеспечивает передачу 16-ти команд телеуправления каждому исполнительному пункту и прием от каждого исполнительного пункта 16-ти команд телесигнализации. В системе предусмотрена индикация ошибочного приема команд телесигнализации на диспетчерском пункте и отсутствия ответа со стороны исполнительного пункта. Кроме того в системе предусмотрена индикация, которая позволяет отслеживать состояние каждого исполнительного пункта.
 |
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
 |
1) Белоруссов, Н.И. Электрические кабели, провода и шнуры: справочник / Н.И. Белоруссов, А.Е. Саакян, А.И. Яковлева. – М.: Изд-во Энергия, 1979.
2) Иванов, В.И. Общая теория связи и передача данных: учебное пособие / В.И. Иванов, И.А. Радкевич. – Челябинск: Изд-во ЮУрГУ, 1998. – 120с.
3) Иванов, В.И. Телемеханика: задания и методические указания к выполнению курсового проекта / В.И. Иванов, И.А. Радкевич. – Челябинск: Изд-во ЮУрГУ, 1989. – 68с.
4) Москатов, Е.А. Справочник по полупроводниковым приборам / Е.А. Москатов. – 2-е изд. – Таганрог, 2008. – 219с.
5) Шило, В.Л. Популярные цифровые микросхемы: справочник / В.Л. Шило. – 2-е изд., испр. – Челябинск: Металлургия, 1989. – 352с.
6) Якубовский, С.В. Цифровые и аналоговые интегральные микросхемы: справочник. / С.В. Якубовский, Л.И. Ниссельсон, В.И. Кулешова, В.А. Ушибышев. – М.: Изд-во Радио и связь, 1990. – 496с.
Дата добавления: 2018-02-15; просмотров: 1532; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!