Технические характеристики используемого захвата

Рисунок 1.2.1 – Структура модуля электрического захвата
Геометрические размеры захвата.
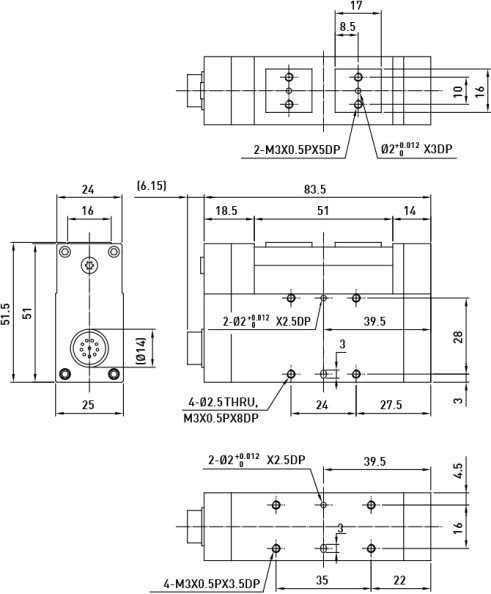
Рисунок 1.2.2 – Размеры захвата HIWIN XEG-16
Расчет момента инерции захвата
Рассчитаем момент инерции захвата относительно оси симметрии нулевой точки позиционирования.
Момент инерции определяется по формуле:
 , где
, где
m – масса захвата (техническое задание);
а – ширина захвата, м;
l – длина захвата, м.
D модель захвата
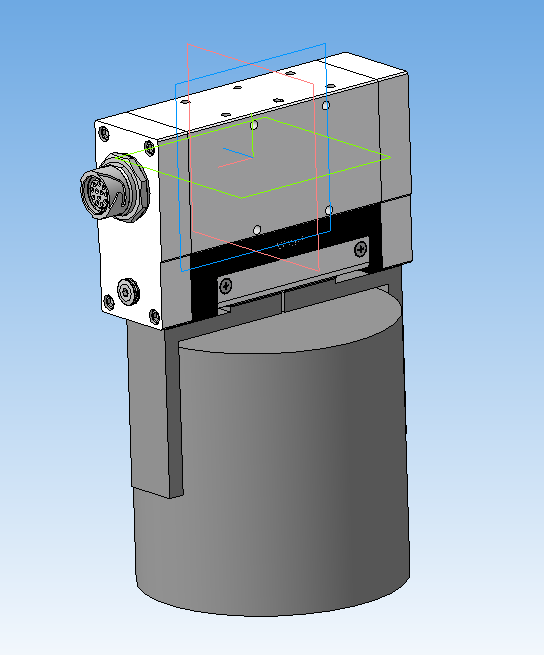
Рисунок 1.2.4 – Модель захвата
Общие характеристики поворотного привода ERMB
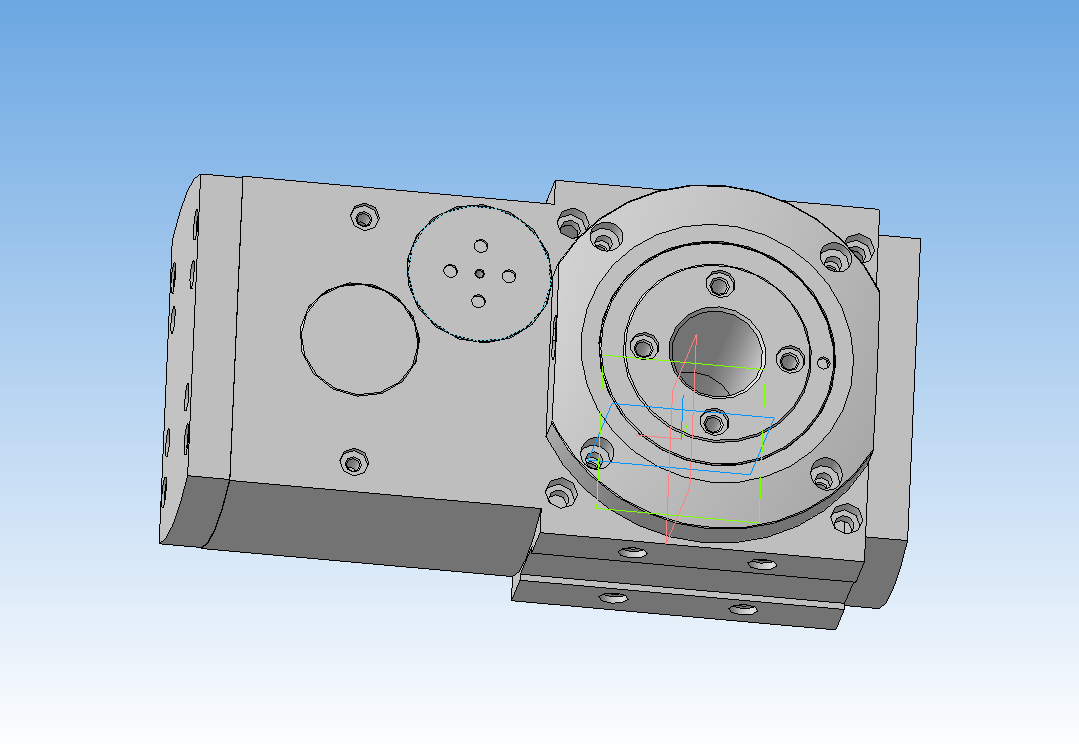
Рисунок 1.3.1 – Модель поворотного модуля
Нагрузочные характеристики поворотного привода
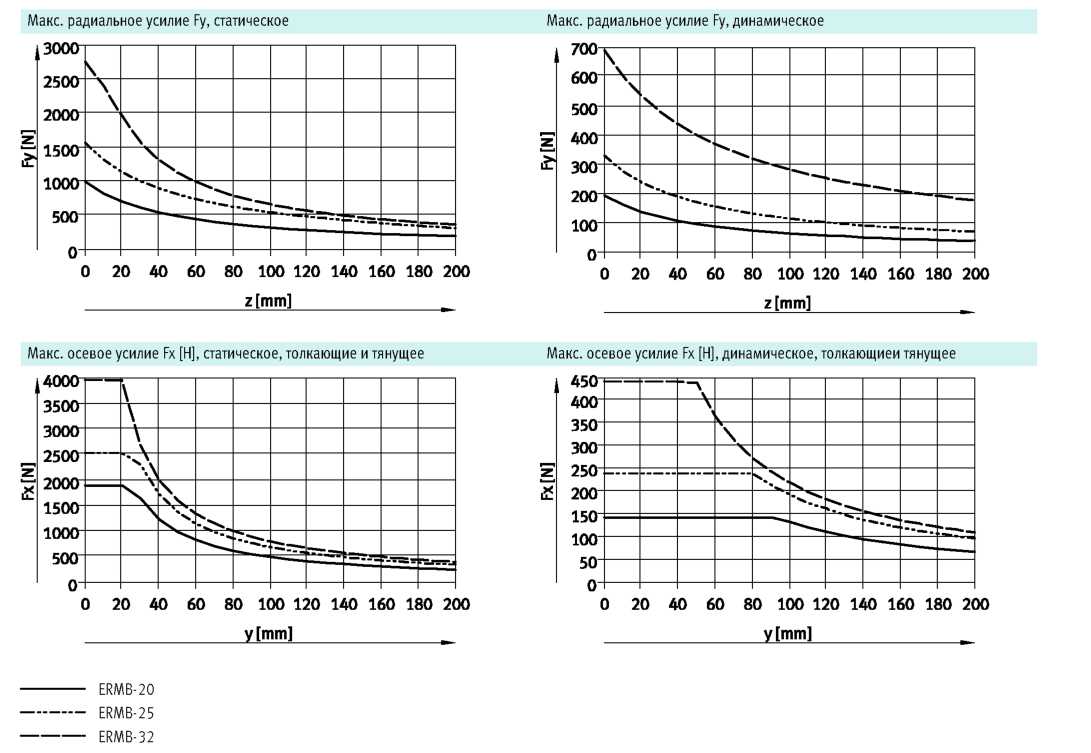
Рисунок 1.3.1 – Графики по определению максимально допустимых нагрузок на поворотный привод.
Время позиционирования
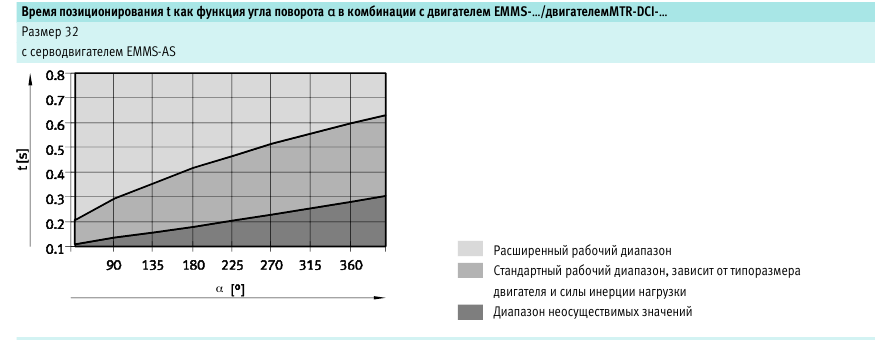
Рисунок 1.3.2 – График по определению времени позиционирования
Исходя из графиков, для обеспечении скорости поворота на 240 градусов за 0.21с выбираем ERMB – 20.
Технические характеристики поворотного привода
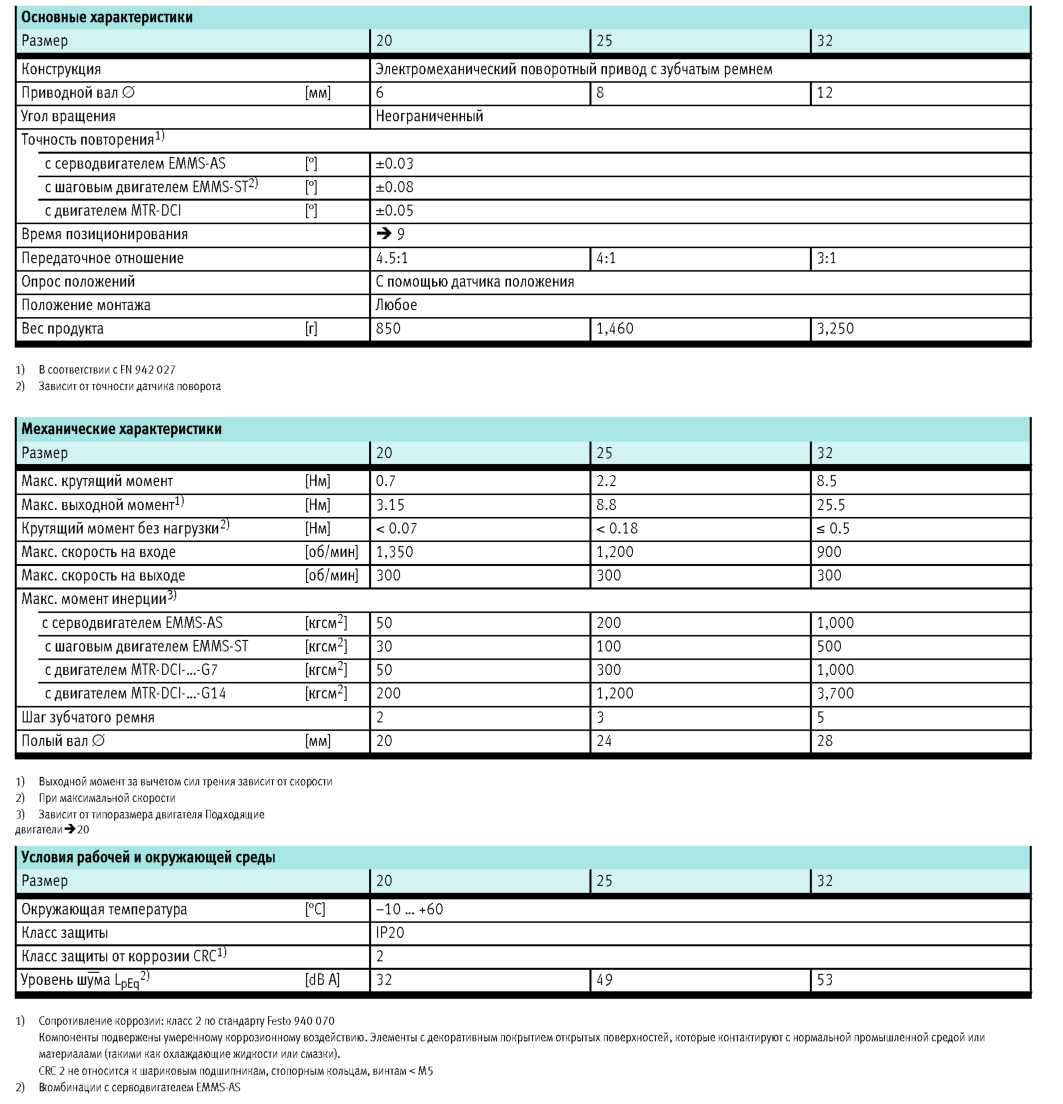
| Рисунок 1.3.3 – Технические характеристики привода ERMB |
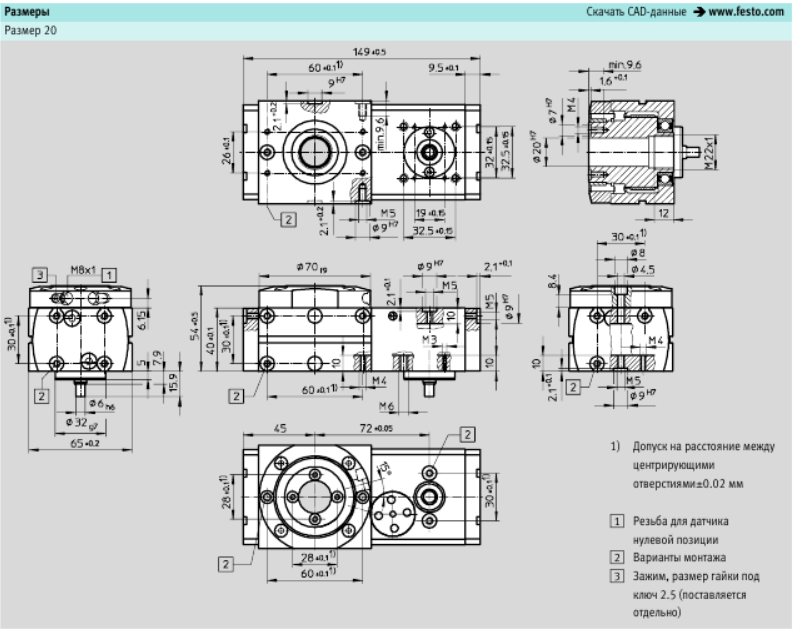
Рисунок 1.3.4.1 – Размеры ERMB-20
Поворотный механизм захвата
Исходя из технического задания:
| Угол поворота захват, град | 240 |
| Угловая скорость поворота захвата, с-1 | 20 |
По заданному углу поворота и угловой скорости поворота ориентировочно определяется время выполнения операции поворота
|
|
|
 ,
,
где:
α-угол поворота, град. (ТЗ);
ω-угловая скорость, с-1 (ТЗ).
По графику рис.1.3.2 для серводвигателя и типоразмера ERMB-20условие t≥ t[φ] выполняется на границе, но для обеспечения скорости выбираем этот. Выбираем t=0.21 c.
Кинематический расчет привода
Для поворотного привода рассматривается три фазы движения: t1-разгон и выход на заданную угловую скорость вращения; t2-вращение с постоянной угловой скоростью; t3- торможение до полной остановки.

Рисунок 1.3.6 – Схема кинематики поворотного привода
Приняв заданное угловое ускорение ɛt1 в процессе разгона постоянным, определяется время разгона и угол поворота вала из выражений:
 ;
;  .
.
Здесь: ɛt1 - заданное угловое ускорение разгона. Принимается для всех вариантов ɛt1 = 140с-2; ω2 - заданная в ТЗ постоянная угловая скорость вала поворотного привода.
Принимая t1=t3 и φt1=φt3 в соответствии с заданным в ТЗ углом поворота захвата φз, определяется угол поворота φt2 захвата,пройденный с постоянной скоростью, и время t2 из выражений
 ;
;

Время цикла перемещения 
Общая масса поворотного привода и захвата с грузом  .
.
 - масса груза, кг;
- масса груза, кг;
 - масса захвата, кг;
- масса захвата, кг;
 - масса поворотного привода, кг.
- масса поворотного привода, кг.
|
|
|
Для манипулятора, включающего захват HIWIN XEG-16, поворотный модуль ERMB-20 и груза массой 2 кг, приведенный к валу поворотного привода момент инерции JА = Jг +Jз=0.000253 + 0.00123 = 0.001483  . Момент инерции двигателя EMMS-AS-55-S-TMB для поворотного привода ERMB-20 равен
. Момент инерции двигателя EMMS-AS-55-S-TMB для поворотного привода ERMB-20 равен  . Заданный угол поворота выходного вала поворотного привода 900, максимальная угловая скорость
. Заданный угол поворота выходного вала поворотного привода 900, максимальная угловая скорость  , максимальное ускорение
, максимальное ускорение  . Требуется определить время выполнения операции поворота, рассчитать нагрузочные характеристики двигателя..
. Требуется определить время выполнения операции поворота, рассчитать нагрузочные характеристики двигателя..
Время фаза 1  = 0,143 с
= 0,143 с
Угол поворота  = 1,43 рад
= 1,43 рад

Время поворота с постоянной скоростью 
Общее время поворота

Максимальная угловая скорость двигателя
ωД = ω2 х i рп = 20  =90 с-1
=90 с-1
Максимальная частота вращения двигателя
n=30ω/  30
30  20/3.14 = 191.1 об/мин
20/3.14 = 191.1 об/мин
Момент инерции, приведенный к валу двигателя
 0,68 10-4 + 0,001483 /4,52= 0.000396кг м2
0,68 10-4 + 0,001483 /4,52= 0.000396кг м2
Здесь: JВД – приведенный к валу двигателя момент инерции привода;
i рп – передаточное отношение ременной передачи поворотного привода.
Угловое ускорение вала двигателя
ɛД = ɛt1 х i рп =140 4,5 =630 с-2
Динамический момент на двигателе
Мвд= JВД · ɛД =0.  630 = 0,252Нм
630 = 0,252Нм
Максимальный действующий момент на двигателе
Мmax = Мвд + Мст = 0,252 + 0.025 = 0,277Нм
Здесь: Мст – статический момент, приведенный к валу двигателя. Он принят равным моменту холостого хода привода.
|
|
|
Каталожный момент удержания  для выбранного двигателя равен
для выбранного двигателя равен  ..
..
Номинальная частота вращения выбранного двигателя – 6600 об/мин.
Таким образом, выбранный двигатель EMMS-AS-55-S-TMB удовлетворяет нагрузочным и скоростным режимам работы привода. Для соединения двигателя и поворотного модуля в соответствие с технической документацией на модуль был выбран монтажный набор -
2234020 EAMM-A-D32-55P-S1.
Линейный привод
Дата добавления: 2021-06-02; просмотров: 202; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!