Преобразование сигналов
Аналого-цифровые преобразователи (АЦП) являются устройствами, которые принимают входные аналоговые сигналы и генерируют соответствующие им цифровые сигналы, пригодные для обработки микропроцессорами и другими цифровыми устройствами.
Принципиально не исключена возможность непосредственного преобразования различных физических величин в цифровую форму, однако эту задачу удается решить лишь в редких случаях из-за сложности таких преобразователей. Поэтому в настоящее время наиболее рациональным признается способ преобразования различных по физической природе величин сначала в функционально связанные с ними электрические, а затем уже с помощью преобразователей напряжение-код - в цифровые. Именно эти преобразователи имеют обычно в виду, когда говорят об АЦП.
Цифровыми сигналами являются сигналы передачи данных, вырабатываемые компьютерами. Таким образом, можно сказать, что цифровой сигнал – это последовательность импульсов. Если принять условно факт наличия импульса за 1, а факт его отсутствия за 0, то импульсную последовательность можно представить как чередование двух цифр: 0 и 1. Отсюда и появилось название «цифровой сигнал». Число, которое принимает только два значения: 0 и 1, называется «двоичной цифрой». В переводе на английский это звучит как «binary digit». В практику широко вошло сокращение, составленное из начальных и конечных букв английского словосочетания, т.е. слово «bit», что на английском читается как бит. Итак, одна позиция в цифровом сигнале есть 1 бит; это может быть либо 0, либо 1. Восемь позиций в цифровом сигнале объединяется понятием байт. При передаче цифровых сигналов естественным образом вводится понятие скорости передачи – это количество бит, передаваемых в единицу времени, чаще всего, в секунду.
|
|
|
Большинство сигналов имеют аналоговую природу, то есть изменяются непрерывно во времени и могут принимать любые значения на некотором интервале.
Аналоговые сигналы используются в телефонии, радиовещании, телевидении. Ввести такой сигнал в компьютер и обработать его невозможно, так как на любом интервале времени он имеет бесконечное множество значений, а для точного (без погрешности) представления его значения требуются числа бесконечной разрядности. Поэтому необходимо преобразовать аналоговый сигнал так, чтобы можно было представить его последовательностью чисел заданной разрядности.
Для того чтобы продемонстрировать преобразование сигналов системы управления поворотными установками солнечной электростанции, рассмотрим диаграмму потока данных, которая продемонстрирована на рисунке 11.
|
|
|
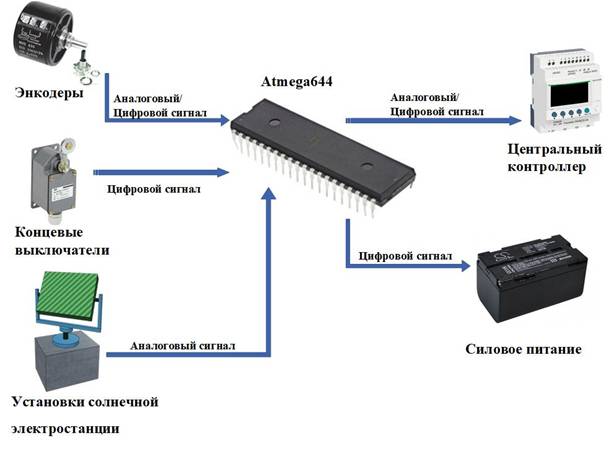
Рисунок 11 – Схема преобразования сигналов
Из схемы преобразования сигналов видно, какие и где проходят сигналы.
Энкодеры которые используются для определения относительного или абсолютного положения механической системы в движении, приводимой в действие электромотором. Затем определённое положение преобразуется в аналоговый или цифровой электрический сигнал для передачи в микроконтроллер Atmega644.
Микроконтроллер Atmega644 собирает информацию со всех возможных датчиков положения, описанных ранее, и предает эту информацию по интерфейсу RS-485 центральному контроллеру. Также, измеряется напряжение и ток, вырабатываемые солнечной батареей, при помощи соответствующих датчиков. Эта информация используется для определения мгновенной вырабатываемой мощности и отправляется на центральный контроллер. При выполнении замера батарея отключается от аккумулятора ключом и подключается к земле через резистор большого сопротивления. Это нужно для того, чтобы измерению подвергалась именно мощность, вырабатываемая батареей, без влияния подключенной нагрузки и степени заряда аккумулятора.
Через данный блок также проходит цепь питания блока управления, как основного потребителя электроэнергии. При помощи датчиков измеряются напряжение и ток, потребляемые блоком управления. Эти данные используются для оценки мощности, потребляемой поворотной установкой. В случае аварийной ситуации (короткое замыкание в цепи питания исполнительных механизмов) возможно значительное повышение потребляемого тока. В этом случае микроконтроллер блока разорвет силовую цепь при помощи ключа. Также данный ключ может применяться при срабатывании концевых выключателей, при этом контроллер блока управления остается в рабочем состоянии за счет разделения питания на цифровую и силовую составляющие.
|
|
|
Таким образом, вышесказанное, поможет реализовать основную цель данной работы. Создание монтажных схем и прошивку, выполненную для микроконтроллера Atmega644. Так, как на более ранних стадиях разработки системы управления поворотными установками солнечной электростанции вместо микроконтроллера Atmega644 использовалась Arduino UNO.
Аппаратная реализация
Аппаратная часть управления поворотными установками состоит из двух устройств: устройства управления и блока обратной связи.
Блок обратной связи состоит из:
1) микроконтроллера Atmega644;
|
|
|
2) одной кнопки для сброса;
3) потенциометра, в качестве устройства аналогового ввода;
4) концевых выключателей;
5) двух реле для защиты цепей и переключения в измерительный режим;
6) модуля SPI для программирования микроконтроллера, не вынимая его из платы;
7) двух датчиков тока ACS712-20A для снятия характеристик солнечных панелей;
8) микросхемы SN65117BP для преобразования шины RS-485 в UART;
Устройство управления состоит из:
1) четырех драйверов ключей нижнего и верхнего уровней;
2) восьми транзисторов;
Принципиальная схема устройства управления продемонстрирована на рисунке А.1 в Приложении А. На ней показаны основные узлы аппаратной части комплекса и то, как они взаимосвязаны друг с другом.
Принципиальная схема блока обратной связи продемонстрирована на рисунке Б.1 в Приложении Б.
Как видно из рисунка 13, к блоку обратной связи, подключаются солнечные панели и аккумулятор. Энергия с данных источников и накопителей системы питают все устройства. Силовая линия служит для питания приводов поворотной установки, а цифровая линия для питания цифровых микросхем, на каждом из устройств. К силовой линии подключается коммутационная часть платы силового блока, а к цифровой линии основная часть силового блока и устройство управления. На каждом из устройств, установлены стабилизаторы напряжения на 5 вольт. Также к блоку обратной связи подключаются концевики и гироскоп для определения положения поворотной установки.
Документирование
Техническое задание
4.1.1 Введение
Система управления поворотной установкой предназначена для поиска оптимального положения солнечных панелей с целью получения максимальной вырабатываемой мощности с учётом сезонных и временных положений солнца. Она состоит из следующих компонентов: силовой блок – предназначен для управления приводами поворотной установки через шину RS-485. Блок обратной связи – предназначен для снятия вольтамперных характеристик солнечных панелей и определения положения солнечных панелей в пространстве. Устройство управления – реализует алгоритмы нахождения оптимального положения панелей, при помощи управления силовым блоком, получения информации с блока обратной связи, и для передачи основных параметров блоку ввода вывода.
4.1.2 Назначение разработки
Предполагается, что данный проект будет способствовать созданию недорогого и эффективного способа получения альтернативной электроэнергии.
Проект ориентирован на производство и коммерческое применение, как в сфере частного сектора, так и в легкой и средней промышленности.
Разрабатываемая система позволит значительно повысить энергетические показатели солнечных батарей, что ведет к повышению бесперебойности и надежности питания от таких систем, а в случае проектирования крупных солнечных электростанций – уменьшить суммарное количество солнечных панелей. Разрабатываемая система и запланированные исследования помогут повысить надежность и рентабельность электроснабжения отдаленных территорий и объектов Забайкальского края и Российской Федерации, использующих дизельные генераторы. При этом возможно применять как обособленные поворотные установки, так и комплекс взаимосвязанных установок.
Результаты работы уже заинтересованы различные организации и предприятия Забайкальского края.
Например, Акционерное общество «Забайкальская топливно-энергетическая компания» (АО «ЗабТЭК»), являющаяся крупным предприятием в сфере коммунальных услуг может решить при помощи результатов данной работы ряд проблем обеспечения электричеством и теплом труднодоступных социальных объектов края, находящихся в их непосредственном ведомстве. Одной из таких проблем является диспетчеризация протяженных участков водоводов систем водоснабжения, при этом для оборудования требуется источник питания, а проведение отдельных линий электропередач является нерентабельным. Решить проблему можно путем применения эффективных систем гелиоэнергетики.
В эффективном электроснабжении труднодоступных населенных пунктов, помимо АО «ЗабТЭК», безусловно заинтересованы администрации города Чита и Забайкальского края, ПАО ТГК-14, РОССЕТИ, Читаэнерго, ОАО РЖД. Подтверждением является реализованный в Забайкальском крае проект гибридной солнечно-дизельной электростанции недалеко от села Менза Красночикойского района.
4.1.3 Требования к функциональным характеристикам
Устройство управления должно предоставлять следующие функции:
- определять приблизительное положение солнечных панелей, при помощи алгоритма, вычисляющего топографические координаты солнца, относительно времени и координат положения системы;
- осуществлять поиск оптимального положения солнечных панелей, опираясь на данные, полученные с блока обратной связи.
- инициировать сессии обмена данными с блоком ввода вывода для получения пользовательских настроек с блока ввода вывода, а также для обновления параметров системы на блоке ввода вывода.
Блок обратной связи предоставляет функции по измерению вольтамперных характеристик панелей, по определению положения панелей, и по предоставлению этих данных основному устройству.
4.1.4 Требования к надёжности
Все устройства выполнены при помощи печатного монтажа, что обеспечивает устойчивую работу каждого из устройства.
Программная часть комплекса должна обеспечивать стабильное выполнение поставленных задач. При возникновении исключений и при прекращении стабильной работы устройства предусмотрена перезагрузка.
4.1.5 Минимальные требования к устройствам
Каждое устройство оснащено корпусом, защищающим устройство от внешних воздействий окружающей его среды. Размеры устройств должны быть достаточными, для удобного монтажа устройств в щите автоматизации.
4.1.6 Требования к документации
Документация к программной и аппаратной части должна содержать руководство пользователя.
Руководство пользователя
4.2.1 Общее назначение
Устройство управления предназначено для вычисления оптимального положения солнечных панелей. Блок обратной связи предназначен для измерения вольтамперных характеристик солнечных панелей, а также для измерения положения поворотной установки в пространстве.
4.2.2 Установка и использование
Блок ввода вывода и устройство управления устанавливаются в щит автоматизации. Устройство управления в свою очередь устанавливается вглубь щита.
Для взаимодействия устройства управления, датчиков и других устройств комплекса автоматического управления, его необходимо подключить к шине RS-485, через клеммную колодку.
К блоку обратной связи подключаем, концевики, и гироскоп. Соединяем силовую линию блока обратной связи с силовой линией, коммутационной части силового блока. Соединяем к цифровой линии устройство управления.
После проведения данных операций, убеждаемся в правильности подключения всех узлов и подключаем аккумулятор и солнечные панели к соответствующим выводам на блоке обратной связи.
Приложение А
(обязательное)
Схема блока управления
Рисунок А.1 – Принципиальная схема блока управления
Приложение Б
(обязательное)
Схема блока обратной связи
Рисунок Б.1 – Принципиальная схема блока обратной связи
Дата добавления: 2021-01-21; просмотров: 88; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!