Модели в механике. Система отсчета. Траектория, длина пути, вектор перемещения
Группа 20ТР Физика ЛК – 1
Механика
Элементы кинематики
ВВЕДЕНИЕ
ПРЕДМЕТ ФИЗИКИ И ЕЕ СВЯЗЬ С ДРУГИМИ НАУКАМИ
Окружающий нас мир, все существующее вокруг нас и обнаруживаемое нами посредством ощущений представляют собой материю.
Неотъемлемым свойством материи и формой ее существования является движение. Движение в широком смысле слова — это всевозможные изменения материи — от простого перемещения до сложнейших процессов мышления.
Разнообразные формы движения материи изучаются различными науками, в том числе и физикой. Предмет физики, как, впрочем, и любой науки, может быть раскрыт только по мере его детального изложения. Дать строгое определение предмета физики довольно сложно, потому что границы между физикой и рядом смежных дисциплин условны. На данной стадии развития нельзя сохранить определение физики только как науки о природе.
Академик А. Ф.Иоффе (1880-1960; российский физик) определил физику как науку, изучающую общие свойства и законы движения вещества и поля. В настоящее время общепризнано, что все взаимодействия осуществляются посредством полей, например гравитационных, электромагнитных, полей ядерных сил. Поле наряду с веществом является одной из форм существования материи. Неразрывная связь поля и вещества, а также различие в их свойствах будут рассмотрены по мере изучения курса.
Физика — наука о наиболее простых и вместе с тем наиболее общих формах движения материи и их взаимных превращениях. Изучаемые физикой формы движения материи (механическая, тепловая и др.) присутствуют во всех высших и более сложных формах движения материи (химических, биологических и др.). Поэтому они, будучи наиболее простыми, являются в то же время наиболее общими формами движения материи. Высшие и более сложные формы движения материи — предмет изучения других наук (химии, биологии и др.).
|
|
|
Теснейшая связь физики со многими отраслями естествознания, как отмечал академик С.И.Вавилов (1891 — 1955; российский физик и общественный деятель), привела к тому, что физика глубочайшими корнями вросла в астрономию, геологию, химию, биологию и другие естественные науки. В результате образовался ряд новых смежных дисциплин, таких, как астрофизика, биофизика и др.
Физика тесно связана и с техникой, причем эта связь имеет двусторонний характер. Физика выросла из потребностей техники (развитие механики у древних греков, например, было вызвано запросами строительной и военной техники того времени), и техника, в свою очередь, определяет направление физических исследований (например, в свое время задача создания наиболее экономичных тепловых двигателей вызвала интенсивное развитие термодинамики). С другой стороны, от развития физики зависит технический уровень производства. Физика — база для создания новых отраслей техники (электронная техника, ядерная техника и др.).
|
|
|
Бурный темп развития физики, растущие связи ее с техникой указывают на значительную роль курса физики во втузе — это фундаментальная база для теоретической подготовки инженера, без которой его успешная деятельность невозможна.
ЕДИНИЦЫ ФИЗИЧЕСКИХ ВЕЛИЧИН
Основным методом исследования в физике является опыт — основанное на практике чувственно-эмпирическое познание объективной действительности, т. е. наблюдение исследуемых явлений в точно учитываемых условиях, позволяющих следить за ходом явлений и многократно воспроизводить его при повторении этих условий.
Для объяснения экспериментальных данных выдвигаются гипотезы. Гипотеза — это научное предположение, позволяющее уяснить сущность происходящих явлений и требующее проверки на опыте и теоретического обоснования для того, чтобы стать достоверной научной теорией.
В результате обобщения экспериментальных данных, а также накопленного опыта людей устанавливаются физические законы — устойчивые повторяющиеся объективные закономерности, существующие в природе. Наиболее важные законы устанавливают связь между физическими величинами. Измерение физической величины есть действие, выполняемое с помощью средств измерений для нахождения значения физической величины в принятых единицах.
|
|
|
Единицы физических величин можно выбрать произвольно, но тогда возникнут трудности при их сравнении. Поэтому целесообразно ввести систему единиц, охватывающую единицы всех физических величин.
Для построения системы единиц произвольно выбирают единицы для нескольких не зависящих друг от друга физических величин. Эти единицы называются основными. Остальные же единицы, называемые производными, выводятся из физических законов, связывающих их с основными единицами.
В научной, а также в учебной литературе обязательна к применению Система интернациональная (СИ).Она построена на семи основных единицах — метр, килограмм, секунда, ампер, кельвин, моль, кандела — и двух дополнительных — радиан и стерадиан.
Метр (м) — длина пути, проходимого светом в вакууме за 1/299 792 458 с.
Килограмм (кг) — масса, равная массе международного прототипа килограмма (платиноиридиевого цилиндра, хранящегося в Международном бюро мер и весов в Севре, близ Парижа).
|
|
|
Секунда (с) — время, равное 9 192 631 770 периодам излучения, соответствующего переходу между двумя сверхтонкими уровнями основного состояния атома цезия-133. Ампер (А) — сила неизменяющегося тока, который при прохождении по двум параллельным прямолинейным проводникам бесконечной длины и ничтожно малого поперечного сечения, расположенным в вакууме на расстоянии 1 м один от другого, создает между этими проводниками силу, равную 2 • 10-7 Н на каждый метр длины. Кельвин (К) — 1/273,16 часть термодинамической температуры тройной точки воды. Моль (моль) — количество вещества системы, содержащей столько же структурных элементов, сколько атомов содержится в нуклиде 12С массой 0,012 кг.
Кандела (кд) — сила света в заданном направлении источника, испускающего монохроматическое излучение частотой 540 • 1012 Гц, энергетическая сила света которого в этом направлении составляет 1/683 Вт/ср.
Радиан (рад) — угол между двумя радиусами окружности, длина дуги между которыми равна радиусу.
Стерадиан (ср) — телесный угол с вершиной в центре сферы, вырезающий на поверхности сферы площадь, равную площади квадрата со стороной, равной радиусу сферы.
ЭЛЕМЕНТЫ КИНЕМАТИКИ
Модели в механике. Система отсчета. Траектория, длина пути, вектор перемещения
Механика — часть физики, которая изучает закономерности механического движения и причины, вызывающие или изменяющие это движение. Механическое движение — это изменение с течением времени взаимного расположения тел или их частей.
Развитие механики как науки начинается с III в. до н.э., когда древнегреческий ученый Архимед (287 — 212 до н.э.) сформулировал закон равновесия рычага и законы равновесия плавающих тел. Основные законы механики установлены итальянским физиком и астрономом Г. Галилеем (1564 —1642) и окончательно сформулированы английским ученым И. Ньютоном (1643 — 1727).
Механика Галилея — Ньютона называется классической механикой. В ней изучаются законы движения макроскопических тел, скорости которых малы по сравнению со скоростью света с в вакууме. Законы движения макроскопических тел со скоростями, сравнимыми со скоростью с, изучаются релятивистской механикой, основанной на специальной теории относительности, сформулированной А.Эйнштейном (1879—1955). Для описания движения микроскопических тел (отдельные атомы и элементарные частицы) законы классической механики неприменимы — они заменяются законами квантовой механики.
Уравнения релятивистской механики в пределе (для скоростей, малых по сравнению со скоростью света) переходят в уравнения классической механики, уравнения квантовой механики в пределе (для масс, больших по сравнению с массами атомов) также переходят в уравнения классической механики. Это указывает на ограниченность применимости классической механики — механики тел больших масс (по сравнению с массой атомов), движущихся с малыми скоростями (по сравнению со скоростью света).
Механика делится на три раздела: 1) кинематику; 2) динамику; 3) статику.
Кинематика изучает движение тел, не рассматривая причины, которые это движение обусловливают.
Динамика изучает законы движения тел и причины, которые вызывают или изменяют это движение.
Статика изучает законы равновесия системы тел. Если известны законы движения тел, то из них можно установить и законы равновесия. Поэтому законы статики отдельно от законов динамики физика не рассматривает.
В механике для описания движения тел в зависимости от условий конкретных задач используются разные физические модели. Простейшей моделью является материальная точка — тело, обладающее массой, размерами которого в данной задаче можно пренебречь. Материальная точка — понятие абстрактное, но его введение облегчает решение практических задач. Например, изучая движение планет по орбитам вокруг Солнца, можно принять их за материальные точки.
Произвольное макроскопическое тело или систему тел можно мысленно разбить на малые, взаимодействующие между собой части, каждая из которых рассматривается как материальная точка. Тогда изучение движения произвольной системы тел сводится к изучению системы материальных точек.
Под воздействием тел друг на друга тела могут деформироваться, т. е. изменять свою форму и размеры. Поэтому в механике вводится еще одна модель — абсолютно твердое тело. Абсолютно твердым называют тело, которое ни при каких условиях не может деформироваться и при всех условиях расстояние между двумя точками (или точнее между двумя частицами) этого тела остается постоянным.
Любое движение твердого тела можно представить как комбинацию поступательного и вращательного движений. Поступательное движение — это движение, при котором любая прямая, жестко связанная с движущимся телом, остается параллельной своему первоначальному положению. Вращательное движение — это движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, называемой осью вращения.
Движение тел происходит в пространстве и во времени. Поэтому для описания движения материальной точки надо знать, в каких местах пространства и в какие моменты времени эта точка находилась в том или ином положении.
Положение материальной точки определяется по отношению к какому-либо другому, произвольно выбранному телу, называемому телом отсчета. С ним связывается система отсчета — совокупность системы координат и часов. В декартовой системе координат, используемой наиболее часто, положение точки А в данный момент времени по отношению к этой системе характеризуется тремя координатами х, у и z или радиусом-вектором г, проведенным из начала системы координат в данную точку (рис. 1). При движении материальной точки ее координаты с течением времени изменяются. В общем случае ее движение определяется скалярными уравнениями
x=x(t), y=y(t),z=z(t), (1.1)
эквивалентными векторному уравнению
r = r(t). (1.2)
Уравнения (1.1) и (1.2) называются кинематическими уравнениями движения материальной точки.

Рис. 1 Рис. 2
Число независимых величин, полностью определяющих положение точки в пространстве, называется числом степеней свободы. Если материальная точка свободно движется в пространстве, то, как уже было сказано, она обладает тремя степенями свободы (координаты х, у и z); если она движется по некоторой поверхности, то двумя степенями свободы, если вдоль некоторой линии, то одной степенью свободы.
Исключая t в уравнениях (1.1) и (1.2), получим уравнение траектории движения материальной точки. Траектория — линия, описываемая в пространстве движущейся точкой. В зависимости от формы траектории движение может быть прямолинейным или криволинейным.
Рассмотрим движение материальной точки вдоль произвольной траектории (рис. 2). Отсчет времени начнем с момента, когда точка находилась в положении А. Длина участка траектории АВ, пройденного материальной точкой с момента начала отсчета времени, называется длиной пути ΔS и является скалярной функцией времени: Δs = Δs(t). Вектор Δr = r 2 – r 1проведенный из начального положения движущейся точки в положение ее в данный момент времени (приращение радиуса-вектора точки за рассматриваемый промежуток времени), называется перемещением.
При прямолинейном движении вектор перемещения совпадает с соответствующим участком траектории и модуль перемещения |Δr| равен пройденному пути Δs.
Скорость
Для характеристики движения материальной точки вводится векторная величина — скорость, которой определяется как быстрота движения, так и его направление в данный момент времени.

Рис.3
Пусть материальная точка движется по какой-либо криволинейной траектории так, что в момент времени t ей соответствует радиус-вектор r 1(рис. 3). В течение малого промежутка времени t точка пройдет путь Δs и получит элементарное (бесконечно малое) перемещение Δг. Вектором средней скорости (v) называется отношение приращения Δг радиус-вектора точки к промежутку времени Δt:
 (2.1)
(2.1)
Направление вектора средней скорости совпадает с направлением Δг. При неограниченном уменьшении Δt средняя скорость стремится к предельному значению, которое называется мгновенной скоростью v:

Мгновенная скорость v, таким образом, есть векторная величина, определяемая первой производной радиуса-вектора движущейся точки по времени. Так как секущая в пределе совпадает с касательной, то вектор скорости v направлен по касательной к траектории в сторону движения (см. рис. 3). По мере уменьшения Δt длина пути Δs все больше будет приближаться к |Δг|, поэтому


Таким образом, модуль мгновенной скорости равен первой производной пути по времени:

При неравномерном движении модуль мгновенной скорости с течением времени изменяется. В данном случае пользуются скалярной величиной (v) — средней скоростью неравномерного движения:
(v) = Δs/Δt .
Ускорение и его составляющие
В случае неравномерного движения важно знать, как быстро изменяется скорость с течением времени. Физической величиной, характеризующей быстроту изменения скорости по модулю и направлению, является ускорение.
Рассмотрим плоское движение, т. е. движение, при котором все участки траектории точки лежат в одной плоскости. Пусть вектор v задает скорость точки А в момент времени t. За время Δt движущаяся точка перешла в положение В и приобрела скорость, отличную от v как по модулю, так и направлению и равную v1 = v + Δv. Перенесем вектор v1 в точку А и найдем Δv (рис. 4).
Средним ускорением неравномерного движения в интервале от t до t + Δt называется векторная величина, равная отношению изменения скорости Δv к интервалу времени Δt:
(а) = Δv/Δt.
Мгновенным ускорением а (ускорением) материальной точки в момент времени t будет предел среднего ускорения: Рис А

Таким образом, ускорениеа есть векторная величина, определяемая первой производной скорости по времени. Разложим вектор Δv; на две составляющие. Для этого из точки А (см. рис. 4) по направлению скорости v отложим вектор AD, по модулю равный v1 . Очевидно, что вектор CD, равный Δv1, определяет изменение скорости за время Δtпо модулю: Δv = v1 — v. Вторая же составляющая Δvn вектора Δv; характеризует изменение скорости за время Δtпо направлению.
Тангенциальная составляющая ускорения

т.е. равна первой производной по времени от модуля скорости: она определяет быстроту изменения скорости по модулю.
Найдем вторую составляющую ускорения. Допустим, что точка В достаточно близка к точке А, поэтому Δs можно считать дугой окружности некоторого радиуса г, мало отличающейся от хорды АВ. Тогда из подобия треугольников АОВ и EAD следует н
Δv/АВ = v1/r, но так как АВ = vΔt, то

В пределе при Δt —> 0 получим v1 —> v.
Поскольку v1 —> v, угол EADстремится к нулю, а так как треугольник EAD равнобедренный, то угол ADE между v и стремится к прямому. Следовательно,
при Δt—> 0 векторы и v оказываются взаимно перпендикулярными. Так как вектор скорости направлен по касательной к траектории, то вектор Δvn , перпендикулярный вектору скорости, направлен к центру ее кривизны. Составляющая ускорения

называется нормальной составляющей ускорения и направлена по главной нормали к траектории к центру ее кривизны.
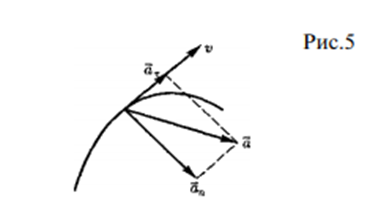
Полное ускорение тела есть геометрическая сумма тангенциальной и нормальной составляющих (рис. 5):

Итак, тангенциальная составляющая ускорения характеризует быстроту изменения модуля скорости (направлена по касательной к траектории), а нормальная составляющая ускорения — быстроту изменения направления скорости (направлена по главной нормали к центру кривизны траектории). Составляющие аτ и аnперпендикулярны друг другу.
В зависимости от тангенциальной и нормальной составляющих ускорения, движение можно классифицировать следующим образом:
1) аτ = 0, аn = 0 — прямолинейное равномерное движение;
2) аτ = а = const, аn = 0 — прямолинейное равнопеременное движение. При таком виде движения

Если начальный момент времени t1 = 0, а начальная скорость v1 = v0, то, приняв t2 = tv2 = v, получим a = (v – v0)/t
v = v0 +at.
Проинтегрировав эту формулу в пределах от нуля до произвольного момента времени t, найдем, что длина пути, пройденного точкой, в случае равнопеременного движения

3) аτ = f(t), аn = 0 — прямолинейное движение с переменным ускорением;
4) аτ = 0, аn = const. Приаτ = 0 скорость изменяется только по направлению. Из формулы an = v2/r следует, что радиус кривизны должен быть постоянным. Следовательно, движение по окружности является равномерным;
5) аτ = 0, аn≠ 0 — равномерное криволинейное движение;
6) аτ = const, аn ≠ 0 — криволинейное равнопеременное движение;
7) аτ = f(t), аn≠0 — криволинейное движение с переменным ускорением.
Дата добавления: 2020-12-22; просмотров: 197; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!