Типовая схема пуска ДПТ с последовательным возбуждением в функции тока
Разомкнутые и замкнутые системы автоматического управления электроприводами.
Управление электроприводами заключается в осуществлении пуска, регулирования скорости, торможения, реверсирования, а также поддержания режима работы привода в соответствии с требованиями технологического процесса.
Если пуск электропривода, регулирование скорости и торможение осуществляется с помощью аппаратов ручного управления, то имеет место неавтоматическое (ручное) управление. Электропривод, управляемый таким способом, называется неавтоматизированным.
Применение аппаратов ручного управления связано с дополнительной затратой времени на управление и, следовательно, снижает производительность механизма, особенно в тех случаях, когда его работа связана с частыми пусками или регулированием скорости. Кроме того, применение аппаратов ручного управления исключает возможность дистанционного управления, что неприемлемо в ряде современных автоматизированных установок.
Если же при управлении электроприводом человек участвует только в подаче начального управляющего воздействия, а остальные действия по управлению осуществляют различные аппараты (реле, контакторы, логические и бесконтактные устройства), то такой управляемый электропривод называется автоматизированным.
Электропривод, в котором все операции по управлению осуществляют автоматические аппараты и устройства, а участие человека предусматривает только надзор за электромеханической системой, называется автоматическим.
|
|
|
Управление автоматизированным и автоматическим электроприводом осуществляет система управления, которая во взаимодействии с двигателем, преобразователями и автоматическими управляющими устройствами называется электромеханической автоматической системой управления электроприводом (АСУЭП).
В системе управления электроприводом используются:
- релейно-контактные аппараты, где основными элементами являются различного рода реле, контакторы, путевые выключатели и др;
- усилители, преобразовательные устройства и датчики - электромашинные,
электромагнитные, полупроводниковые (транзисторные, тиристорные, интегральные) и т.п;
- бесконтактные логические элементы цифровой и аналоговой вычислительной техники, микропроцессоры и микро-ЭВМ и т.п.
По количеству используемых для управления электроприводом сигналов (каналов информации) различают три вида систем управления: по разомкнутому, замкнутому и комбинированному циклам.
Системы электропривода, управляемые по разомкнутому циклу, называются разомкнутыми системами. Процесс управления по этой системе характеризуется отсутствием всякого измерения и контроля значения регулируемой величины (скорости, момента и т.п.). Регулирующее воздействие в этой системе от регулируемой величины не зависит, т.е. имеет место воздействие и регулирование в одном направлении (используется только один канал информации).
|
|
|
Системы, управляемые по замкнутому циклу и называемые замкнутыми, одновременно используют два канала информации: задающий и о фактическом значении регулируемой величины - обратная связь. Задающая информация сравнивается с информацией обратной связи, и в зависимости от значения и знака результирующего сигнала по каналу управления вырабатывается регулирующее воздействие на электропривод таким образом, чтобы свести ошибку к минимуму. Качество и точность работы системы с обратными связями намного выше, чем разомкнутой.
В системах, управляемых по комбинированному циклу и называемых комбинированными, сочетаются две системы — замкнутая и разомкнутая, обеспечивающие независимость регулируемой величины. Качество и надежность работы электропривода улучшается.
При автоматическом управлении электроприводом и технологическим процессом применяется управление в функции мощности, момента, натяжения, температуры, цвета, числа операций и др.
|
|
|
Управление в функции времени - осуществляется с помощью аппаратов, контролирующих время, т.е. реле времени, настроенных на отсчет заданных выдержек времени.
Управление в функции скорости производится с помощью реле, контролирующих угловую скорость двигателя непосредственно или косвенно.
Управление в функции тока осуществляется путем применения реле минимального или максимального тока.
Управление в функции ЭДС производится с помощью реле или контакторов, настроенных на срабатывание при различных значениях ЭДС якоря или ротора.
Типовая схема пуска двигателя постоянного тока с независимым возбуждением в функции времени
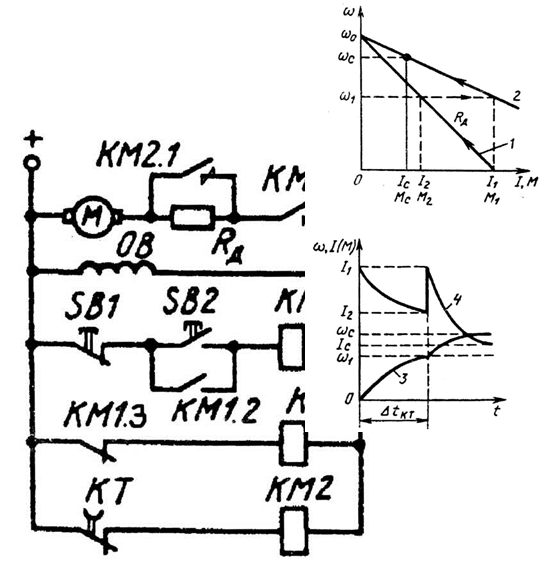 |
При подаче напряжения на схему, получает питание катушка реле времени КТ, контакт реле времени КТ размыкается. При нажатии кнопки SB2 получает питание контактор КМ1, который своим главным контактом КМ1.1 подключает двигатель к источнику питания. Двигатель начинает разбег с включенным резистором Rд в цепи якоря. Одновременно замыкающий блок-контакт КМ1.2 контактора шунтирует кнопку SB2 и она может быть отпущена, а размыкающий блок-контакт КМ1.3 разрывает цепь питания катушки реле времени КТ. После прекращения питания катушки реле времени через интервал времени ∆tкт, называемый выдержкой времени, размыкающий контакт КТ замкнется в цепи катушки контактора КМ2, последний включится и главным контактом КМ2.1 закоротит пусковой резистор Rд в цепи якоря. Таким образом, при пуске двигатель в течение времени ∆tкт разгоняется по искусственной характеристике 1, а после шунтирования резистора Rд - по естественной характеристике 2.
|
|
|
Сопротивление резистора Rд выбирается таким образом, чтобы в момент включения двигателя ток I1 в цепи и соответственно момент М1 не превышали допустимого уровня.
За время ∆tкт после начала пуска скорость вращения двигателя (3) достигает значения ω1, а ток в цепи якоря (4) снижается до уровня I2. После шунтирования резистора Rд, ток в цепи якоря скачком возрастает до значения I1, не превышающего допустимого уровня. Изменение скорости, тока и момента во времени происходит по экспоненте.
Время изменения скорости двигателя от нуля до ω1, определяющее настройку реле времени КТ, можно рассчитать по формуле.
Типовая схема пуска ДПТ с последовательным возбуждением в функции тока
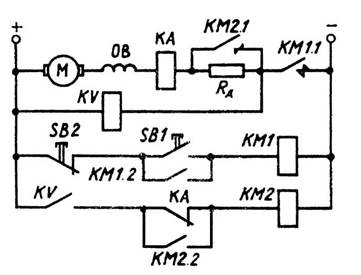 |
В этой схеме катушка реле тока КА включена в цепь якоря М, а размыкающий контакт - в цепь питания контактора ускорения КМ2. Реле тока настраивается таким образом, чтобы его ток отпускания соответствовал току I2 в схеме используется также дополнительное реле KV с временем срабатывания больше, чем у реле КА.
При нажатии на кнопку SВ1 срабатывает контактор КМ1, двигатель подключается к источнику питания и начинает свой разбег. Бросок тока в якорной цепи после замыкания главного контакта контактора КМ1 вызывает срабатывание реле тока КА, которое размыкает свой контакт в цепи контактора КМ2. Через некоторое время после этого срабатывает реле KV и замыкает свой замыкающий контакт в цепи контактора КМ2, подготавливая его к включению.
По мере разбега двигателя ток якоря снижается до значения тока переключения I2, при котором отключается реле тока, замыкая свой размыкающий контакт в цепи катушки контактора КМ2. Последний срабатывает, его главный контакт закорачивает пусковой резистор Rд, в цепи якоря, а вспомогательный контакт шунтирует контакт реле тока КА.
Поэтому вторичное включение реле тока после закорачивания резистора Rд, и броска тока не вызывает отключения контактора КМ2 и двигатель продолжает разбег по своей естественной характеристике.
Замкнутые схемы применяются в тех случаях, когда требуется обеспечить управление движением исполнительных органов рабочих машин с высоким качеством (большой диапазон регулирования скорости и точность ее поддержания, заданное качество переходных процессов и необходимая точность остановки, а также высокая экономичность или оптимальное функционирование технологического оборудования и самого электропривода).
Замкнутые структуры электропривода строятся по принципу компенсации внешних возмущений и принципу отклонения, называемому также принципом обратной связи.
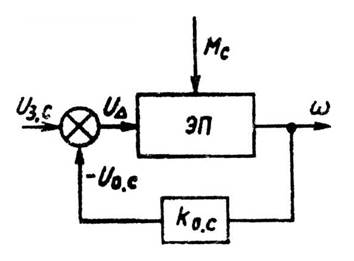
Принцип компенсации рассмотрим на примере компенсации наиболее характерного внешнего возмущения электропривода - момента нагрузки Мс при регулировании его скорости ω.
Основным признаком такой замкнутой структуры ЭП является наличие цепи, по которой на вход ЭП вместе с задающим сигналом скорости Uз.с. подается сигнал, пропорциональный моменту нагрузки: Uм=Kм∙Mc, где Км - коэффициент пропорциональности. В результате управление ЭП осуществляется суммарным сигналом U∆, который автоматически изменяясь при колебаниях момента нагрузки, обеспечивает поддержание скорости на заданном уровне.
 |
Управление по этой схеме осуществляется редко из-за отсутствия простых и надежных датчиков момента нагрузки Мс.
 Поэтому в большинстве замкнутых схем используется принцип отклонения (принцип обратной связи), который характеризуется наличием цепи обратной связи, соединяющей выход ЭП с его входом.
Поэтому в большинстве замкнутых схем используется принцип отклонения (принцип обратной связи), который характеризуется наличием цепи обратной связи, соединяющей выход ЭП с его входом.
В данном случае при регулировании скорости используется цепь обратной связи, по которой информация о текущем значении скорости (сигнал обратной связи Uо.с.=Ко.с.∙ω) подается на вход ЭП, где он вычитается из сигнала задания скорости Uз.с. Управление осуществляется сигналом отклонения U∆ = Uз.с. – Uо.с., который при отличии скорости от заданной соответственно автоматически изменяется и с помощью системы управления ЭП устраняет эти отклонения.
Все применяемые в замкнутом ЭП обратные связи делятся на положительные и отрицательные, линейные и нелинейные, жесткие и гибкие.
Положительной называется такая обратная связь, сигнал которой направлен согласно (т.е. складывается) с задающим сигналом, сигнал же отрицательной связи направлен встречно.
Жесткая обратная связь действует как в установившемся, так и в переходном режимах ЭП.
Сигнал гибкой обратной связи вырабатывается только в переходных режимах ЭП и служит для обеспечения требуемого их качества.
Для линейной обратной связи характерна пропорциональная зависимость между регулируемой координатой и сигналом обратной связи Uo.c., при реализации же нелинейной связи эта зависимость нелинейна.
 |
Дата добавления: 2020-11-29; просмотров: 346; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!