Варианты курсового задания К 4
«Определение абсолютной скорости
И абсолютного ускорения точки»
По заданным уравнениям относительного движения точки М и движения тела D определить для момента времени t1 абсолютные скорость и ускорение точки М. Схемы механизмов показаны на рисунках, а необходимые для расчёта данные приведены в табл. 2.4.
Определить кинематические характеристики точки М в момент времени t1 (OM(t1) – положение точки на траектории относительного движения; Ve(t1) – переносная скорость; Vr(t1) – относительная скорость; V(t1) – абсолютная скорость; ar(t1) – относительное ускорение; aе(t1) – переносное ускорение; aс(t1) – ускорение Кориолиса; a(t1) – абсолютное ускорение).
Для каждого варианта положение точки М на расчётной схеме соответствует положительному значению дуговой координаты ОМ = f(t).
Таблица 2.4
| Номер варианта | Расчётная схема механизма | Исходные данные для расчёта |
| 1 | 2 | 3 |
| 1 |

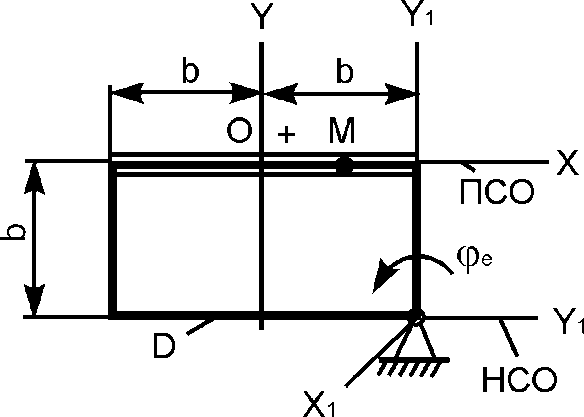
| ОМ = 18·sin(·t/4), см; φe = 2·t3 – t2, рад; b = 25 см; t1 = 2/3 c |
Продолжение табл. 2.4
| 1 | 2 | 3 |
| 2 |
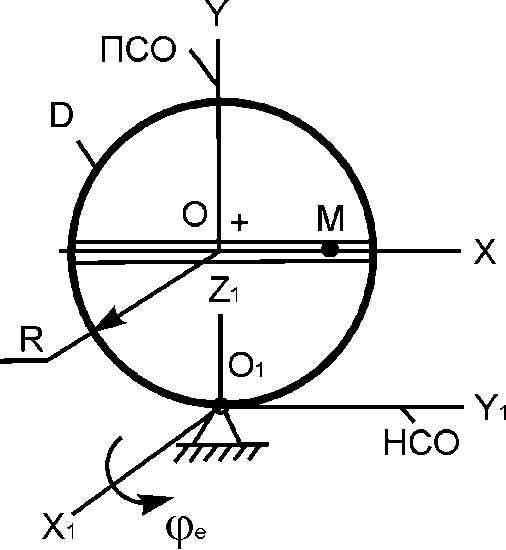
| ОМ = 20·sin(·t), см; φe = 0,4·t2 + t, рад; R = 20 см; t1 = 5/3 c |
| 3 |

| ОМ = 6·t3, см; φe = 2·t + 0,5·t2, рад; b = 30 см; t1 = 2 c |
| 4 |

| ОМ = 10·sin(·t/6), см; φe = 0,6·t2, рад; α = 30o; t1 = 1 c |
Продолжение табл. 2.4
| 1 | 2 | 3 |
| 5 |

| ОМ = 40··сos(·t/6), см; φe = 3·t – 0,5·t3, рад; R = 30 см; t1 = 2 c |
| 6 |
| ОМ = 6·t2, см; φe = 2·t + 4·t2, рад; b = 30 см; t1 = 1 c |
| 7 |

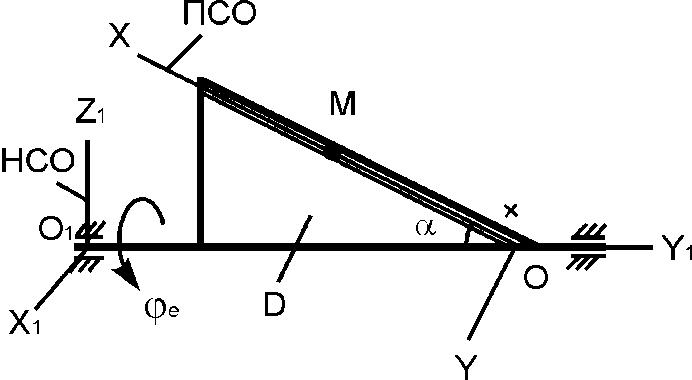
| ОМ = 20··сos(2··t), см; φe = 0,5·t2, рад; b = 40 см; α = 60o; t1 = 3/8 c |
Продолжение табл. 2.4
|
|
|
| 1 | 2 | 3 |
| 8 |
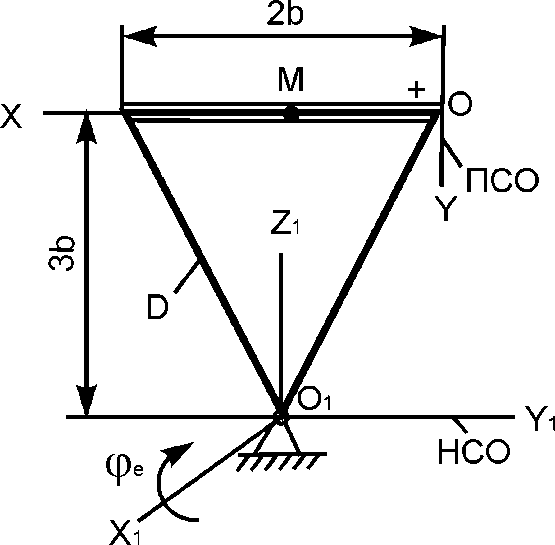
| ОМ = 6·(t + 0,5·t2), см; φe = t3 – 5·t, рад; b = 40 см; α = 30o; t1 = 2 c |
| 9 |

| ОМ = 10·(1+sin(2··t)), см; φe = 4t + 1,6t2, рад; t1 = 1/8 c |
| 10 |

| ОМ = 20··сos(·t/4), см; φe = 1,2·t – t2, рад; R = 20 см; b = 20 см; t1 = 4/3 c |
| 11 |
| ОМ = 20·sin(·t/3), см; φe = 2·t2 – 0,5·t, рад; b = 25 см; t1 = 4 c |
Продолжение табл. 2.4
| 1 | 2 | 3 |
| 12 |

| ОМ = 15··t3/8, см; φe = 5·t – 4·t2, рад; R = 30 см; b = 30 см; t1 = 2 c |
| 13 |

| ОМ = 120··t2, см; φe = 8·t2 – 3·t, рад; R = 40 см; t1 = 1/3 c |
| 14 |

| ОМ =3+14·sin(·t), см; φe = 4·t – 2·t2, рад; α = 30o; t1 = 2/3 c |
Продолжение табл. 2.4
| 1 | 2 | 3 |
| 15 |

|
ОМ = 5·  ·(t2 + t), см;
φe = 0,2·t3 + t; рад;
t1 = 2 c;
b = 60 см;
α = 45o ·(t2 + t), см;
φe = 0,2·t3 + t; рад;
t1 = 2 c;
b = 60 см;
α = 45o
|
| 16 |

| ОМ = 20·sin(·t), см; φe = t – 0,5·t2, рад; b = 20 см; t1 = 1/3 c |
| 17 |

|
ОМ = 8·t3 + 2·t, см;
φe = 0,5·t2, рад;
b = 4·  см;
t1 = 1 c см;
t1 = 1 c
|
| 18 |

| ОМ = 10t + t3, см; φe = 8t – t2, рад; α= 30o; t1 = 2 c |
Продолжение табл. 2.4
|
|
|
| 1 | 2 | 3 |
| 19 |

| ОМ = 6·t + 4·t3, см; φe = t + 3·t2, рад; R = 40 см; t1 = 2 c |
| 20 |
| ОМ = 30··cos(·t/8), см; φe = 6·t + t2, рад; R = 60 см; t1 = 2 c |
| 21 |

| ОМ = 25·(t + t2), см; φe = 2·t – 4·t2, рад; R = 25 см; t1 = 1/2 c |
| 22 |

| ОМ = 10··sin(·t/4), см; φe = 4·t – 0,2·t2, рад; R = 30 см; t1 = 2/3 c |
Продолжение табл. 2.4
| 1 | 2 | 3 |
| 23 |

| ОМ = 6··t2, см; φ = ·t3/6, рад; R = 18 см; OO1 =20 см; t1 = 1 c |
| 24 |

| ОМ = 75· (0,1·t2), см; φe = 2·t – 0,3·t2, рад; R = 30 см; t1 = 1 c |
| 25 |

| ОМ = 15·sin(·t/3), см; φe = 10·t – 0,1·t2, рад; t1 = 5 c |
| 26 |

| ОМ = 8·cos(·t/3), см; φe = 2··t2, рад; α = 45o; t1 = 3/2 c |
Окончание табл. 2.4
| 1 | 2 | 3 |
| 27 |

| ОМ = 6··t2, см; φ = ·t2/6, рад; R = 20см; OO1 =20 см; t1 = 1 c |
| 28 |

| ОМ = 2,5··t2, см; φe = 2·t3 – 5·t, рад; R = 40 см; t1 = 2 c |
| 29 |

| ОМ = 6··t, см; φ = ·t/6, рад; R = 20см; OO1 =20 см; t1 = 1 c |
| 30 |

| ОМ = 4··t2, см; Y1= t3 + 4·t; R = 48 см; t1 = 2 c |
Пример выполнения курсового задания К 4
|
|
|
Дано: уравнение относительного движения точки М
OM = Sr = Sr(t) = 2,5··t2, см;
уравнение вращательного движения тела D
φe = φe(t) = 2·t3 – 5·t, рад;
t1 = 1 c; R = 40 см.
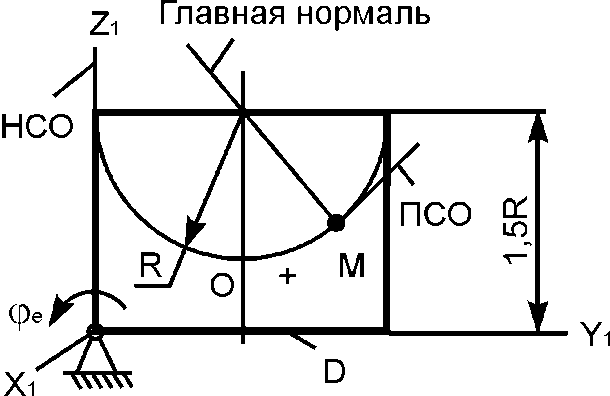
 Рис. 2.49
Рис. 2.49
|
Точка М движется по телу D. По заданным уравнениям относительного движения точки М и движения тела D определить для заданного момента времени t1 абсолютную скорость и абсолютное ускорение точки М (OM(t1) = ? Vr(t1) = ? Ve(t1) = ? V(t1) = ?ar(t1) = ? ae(t1) = ?ac(t1) = ?a(t1)= ?) (рис. 2.49).
Решение. Точка М осуществляет сложное движение, поэтому для решения задачи необходимо ввести неподвижную систему отсчёта O1X1Y1Z1 и подвижную систему отсчёта OXYZ. Изобразим рассматриваемый механизм в момент времени t1 (рис. 2.50).
Координатную ось O1Y1 неподвижной системы отсчёта направим по оси вращения тела D. Подвижную систему отсчёта OXYZ закрепим на теле D, расположив начало отсчёта в точке О. По исходным данным уравнение относительного движения точки М задано естественным способом Sr(t) = 2,5··t2. Исходя из этого, известны следующие характеристики движения: вид траектории движения – дуга окружности радиусом R; начало отсчёта дуговой координаты Sr – точка О; положительное направление отсчёта дуговой координаты Sr – знак (+); уравнение движения Sr = 2,5··t2.
|
|
|
 Рис. 2.50
Рис. 2.50
|
Определим положение точки М на траектории относительного движения в момент времени t1:
Sr(t1) = 2··(t1)2 = 2,5··22 = 10 см > 0.
Для координации точки М на траектории относительного движения целесообразно использовать центральный угол:
(t1) = Sr(t1)/R = 2,5··(t1)2/R = 2,5··22/40 = /4.
Итак, α(t1) = 45о. Точка М тела D, совершающего вращательное движение в неподвижной системе отсчёта O1X1Y1Z1, описывает окружность радиусом
MK = R – R·cos(α(t1)) = R·(1 – cos(α(t1))= 40·(1 – 0,707) = 11,72 см.
Таким образом, траектория переносного движения точки М установлена. Это окружность радиусом МК с центром в точке К, расположенной на оси вращения тела D.
Абсолютное движение точки М – это сумма относительного и переносного движений. Таким образом, траектория абсолютного движения точки М представляет собой винтовую линию, расположенную на сферическом конусе.
Для определения абсолютной скорости V точки М используется векторное равенство
V = Vr + Ve,
где Vr – вектор относительной скорости; Ve – вектор переносной скорости.
Определим проекцию  относительной скорости Vr на касательную:
относительной скорости Vr на касательную:
 =
=  = 5··t.
= 5··t.
В момент времени t1 имеем
(t1) = (t1) = 5··t1 = 5··2 = 10· = 31,4 см/c> 0.
Поскольку (t1) > 0, то модуль относительной Vr(t1) = (t1), а вектор относительной скорости Vr направлен так же, как и единичный вектор τ естественной координатной системы отсчёта. Покажем этот вектор на рис. 2.50.
Для определения переносной скорости Ve предварительно найдем модуль ωе угловой скорости  переносного вращения.
переносного вращения.
ωe = I  I = I6·t2 – 5I.
I = I6·t2 – 5I.
В момент времени (t1) имеем
ωe(t1) = I6·(t1)2 – 5I = I6·22 – 5I = 19 рад/c > 0.
Поскольку ωe(t1) > 0, то величина угла φе возрастает. Покажем на рис. 2.50 направление вращения и определим модуль переносной скорости Ve(t1) по формуле
Ve(t1) = ωe(t1)·МК = 19·11,72 = 222,68 см/с.
Так как Ve(t1) направлена по касательной к траектории переносного движения, то она перпендикулярна плоскости OYZ подвижной системы отсчёта. С другой стороны, Vr┴Ve. Исходя из этого, определим модуль абсолютной скорости:
V(t1) =  =
=  = 224,88 см/с.
= 224,88 см/с.
Если Vr не перпендикулярна Ve, то определение модуля скорости V следует определять через проекции векторного выражения V = Vr + Ve на координатные оси неподвижной системы отсчёта O1X1Y1Z1.
 = Ve;
= Ve;  = – Vr·cos(α);
= – Vr·cos(α);  = Vr·sin(α),
= Vr·sin(α),
где , , – проекции абсолютной скорости на оси O1X1, O1Y1, O1Z1 системы отсчёта O1X1Y1Z1.
V(t1) =  =
=
=  =
=
=  = 224,88 см/с.
= 224,88 см/с.
Для ориентации абсолютной скорости Vв пространстве неподвижной системы отсчёта определим направляющие косинусы.
cos(V, i1) = (t1)/V(t1) = 222,68/224,88 = 0,990;
cos(V, j1) = (t1)/V(t1) = (– 31,4·0,707)/224,88 = – 0,098;
cos(V,k1) = (t1)/V(t1) = (31,4·0,707)/224,88 = 0,098.
При определении абсолютного ускорения a точки М используется формула
a=ar+ae+ac ,
где ar – относительное ускорение; ae – переносное ускорение; ac – ускорение Кориолиса.
Поскольку относительное движение задано естественным способом, то справедливо равенство
ar=  +
+  ,
,
где – относительное касательное ускорение; – относительное нормальное ускорение.
Так как переносное движение является вращательным, то переносное ускорение ae находят по формуле
ae=  +
+  ,
,
где – переносное центростремительное ускорение; – переносное вращательное ускорение.
Исходную формулу для определения абсолютного ускорения можно представить в следующем виде:
a= + + + +ac.
Приступаем к определению слагаемых в правой части последнего выражения.
 =
=  = d
= d  /dt = d(5··t)/dt = 5· = const.
/dt = d(5··t)/dt = 5· = const.
(t1) = 5· = 5·3,14 = 15,7 см/с2> 0 = const.
Так как и имеют одинаковые знаки, то в относительном движении точка М движется равноускоренно. Покажем вектор (t1) на рис. 2.50.
 (t1)= (Vr(t1))2/ρ = (Vr(t1))2/R = (3,14)2/40 = 24,64 см/с2 .
(t1)= (Vr(t1))2/ρ = (Vr(t1))2/R = (3,14)2/40 = 24,64 см/с2 .
Вектор (t1)направлен по главной нормали к центру кривизны траектории относительного движения.
Модуль ar(t1) относительного ускорения ar(t1) в момент времени t1 определим по формуле
ar(t1) =  =
=
=  = 29,276 cм/c2.
= 29,276 cм/c2.
Модуль  (t1) переносного центростремительного ускорения
(t1) переносного центростремительного ускорения  (t1) в момент времени t1 определим по формуле
(t1) в момент времени t1 определим по формуле
(t1) = (ωe(t1))2·MK = (19)2·11,72 = 4230,92 см/с2.
Вектор (t1) направлен к оси переносного вращения. Покажем его на рис. 2.50.
Для определения переносного вращательного ускорения необходимо предварительно определить модуль εе переносного углового ускорения  .
.
εe = I  I = Id /dtI = Id(6·t2 – 5)/dtI = I12·tI.
I = Id /dtI = Id(6·t2 – 5)/dtI = I12·tI.
εe(t1) = 12·t1 = 12·2 = 24 рад/с2.
Так как и имеют одинаковые знаки, то переносное вращение происходит ускоренно. Исходя из этого, направления и Ve совпадают.
 (t1) = εe(t1)·МК = 24·11,72 = 281,28 см/с2.
(t1) = εe(t1)·МК = 24·11,72 = 281,28 см/с2.
Покажем вектор (t1) на рис. 2.50.
Модуль ae(t1) переносного ускорения aе(t1) в момент времени t1 определим по формуле
aе(t1) =  =
=
=  = 4240,259 cм/c2.
= 4240,259 cм/c2.
Приступаем к определению модуля ускорения Кориолиса.
ac(t1) = 2ωе(t1)·Vr(t1)·sin(  (t1), Vr(t1)).
(t1), Vr(t1)).
Согласно определению вектор переносной угловой скорости лежит на оси вращения тела D и направлен в сторону увеличения координаты Y1 (см. рис 2.50).
ac(t1) = 2ωе(t1)·Vr(t1)·sin( (t1), Vr(t1)) = 2ωе(t1)·Vr(t1)·sin(135o) =
= 2·19·31,4·0,707 = 843,59 см/с2.
По правилу векторного произведения (ac = 2( xVr)) ускорение Кориолиса ac направлено так же, как и векторы Ve и . Покажем вектор ускорения Кориолиса на рис. 2.50.
Таким образом, в векторном равенстве
a= + + + +ac
известны все слагаемые, находящиеся в его правой части.
Определим модуль a(t1) абсолютного ускорения a(t1) через его проекции  (t1),
(t1),  (t1),
(t1),  (t1) на оси неподвижной системы отсчёта O1X1Y1Z1 в момент времени (t1).
(t1) на оси неподвижной системы отсчёта O1X1Y1Z1 в момент времени (t1).
(t1) = (t1) + ac(t1) = 281,28 + 843,59 = 1124,87 см/с2;
 (t1) = – (t1)·cos(α(t1)) + (t1)·sin(α(t1)) =
(t1) = – (t1)·cos(α(t1)) + (t1)·sin(α(t1)) =
= – 15,7·0,707 + 24,64·0,707 = 6,32 см/с2;
 (t1) = (t1)·sin(α(t1)) + (t1)·cos(α(t1)) – (t1) =
(t1) = (t1)·sin(α(t1)) + (t1)·cos(α(t1)) – (t1) =
= 15,7·0,707 + 24,64·0,707 – 4230,92 = – 4202,39 см/с2;
a(t1) =  = 4350,01 см/с2.
= 4350,01 см/с2.
Для ориентации абсолютного ускорения в пространстве определим направляющие косинусы.
cos(a, i1) = (t1)/a(t1) = 1124,87/4350,01 = 0,258;
cos(a, j1) = (t1)/a(t1) = 6,32/4350,01 = 0,001;
cos(a, k1) = (t1)/ a(t1) = – 4202,39/4350,01 = – 0,966.
Результаты расчётов сводятся в таблицу.
Таблица
Кинематические характеристики точки М в момент времени t 1
| Sr(t1), см | Vr(t1), см/с | Ve(t1), см/с | V(t1), см/с |  (t1),
см/с2 (t1),
см/с2
|  (t1),
см/с2 (t1),
см/с2
|  (t1),
см/с2 (t1),
см/с2
|
| 31,400 | 31,400 | 222,688 | 224,880 | 15,700 | 24,640 | 29,276 |
Окончание таблицы
 , см/с2 , см/с2
|  , см/с2 , см/с2
|  , см/с2 , см/с2
| ωe(t1), рад/с | εe(t1), рад/с2 | ac(t1), см/с2 | a(t1), см/с2 |
| 4230,920 | 281,280 | 4240,259 | 19,000 | 24,000 | 843,590 | 4350,010 |
Дата добавления: 2020-04-25; просмотров: 295; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!