Примечания о сообщениях системы DGPS
STATION : Показывает GOOD (порядок) или NG (не порядок)
DATA : Показывает GOOD или NG
SIG . S = Signal Strength = мощность сигнала: Отображаются цифры от 0 до 99. Чем выше цифра, тем мощнее сигнал радиомаяка.
SNR = Signal to Noise Ratio = отношение «Сигнал - шум»: Отображаются цифры от 1 до 22. Цифры ниже 18 означают, что местоположение будет ненадёжным. Когда судно находится в пределах зоны досягаемости сигнала радиомаяка, SNR должно быть не менее 21. В противном случае причинами помех могут быть плохое заземление, излучения радиолокатора либо шумы от судового генератора.
Нажмите клавишу ENT]для воспроизведения окна выбора вариантов режима.
Выберите один из нижеприводимых вариантов, а затем нажмите клавишу ENT.
INT BEACON : Определение координат места внутренним приёмником радиомаяка системы DGPS (только для приёмоиндикатора GP-37).
EXT BEACON : Определение координат места внешним приёмником радиомаяка системы DGPS (GP-32).
AUTO : Определение координат места по DGPS, WAAS и GPS в порядке доступности.
Примечание: При подключении внешнего приёмника радиомаяка системы DGPS фирмы FURUNO (такого, например, как GR-80) к прибору GP-32 включите дистанционную функцию устройства GR-80 для настройки приёмника радиомаяка на данные, установленные на приборе GP-32.
Курсор перемещается на поле STATION. Нажмите клавишу ENT.
Выберите метод выбора станции радиомаяка системы DGPS: AUTO, MANUAL или LIST ( ПЕРЕЧЕНЬ).
AUTO :
Автоматический поиск наилучшей из пяти ближайших станций радиомаяка системы DGPS. Поиск ведётся от ближайших к удалённым станциям. В случае неудачи поиск продолжается по мощности сигнала. Эта процедура повторяется до тех пор, пока не будет найдена подходящая станция.
|
|
|
MANUAL :
Ручной ввод технических характеристик радиомаяка системы DGPS в полях RATЕ и FREQ с использованием перечня станций системы DGPS.
LIST :
Перечисляет пять ближайших станций радиомаяка системы DGPS, включая запрограммированные пользователем станции.
7. Нажмите клавишу ENT. Если выбран режим AUTO, то нужно перейти к шагу 8. Для режимов MANUAL или LIST выполните одну из следующих процедур, а затем переходите к шагу 8:
MANUAL:
а) Курсор находится на поле RATE. Нажмите клавишу ENT.
в) Выберите скорость передачи (посылки сигнала) станции радиомаяка системы DGPS, которая (станция) будет использоваться; скорость выберите из следующих величин: 50; 100 или 200 бит в секунду. Нажмите клавишу ENT.
Курсор установится на поле FREQ. Нажмите клавишу ENT.
Введите с помощью курсорной клавиши частоту посылки сигнала станции, которая будет использоваться, а затем нажмите клавишу ENT.
LIST:
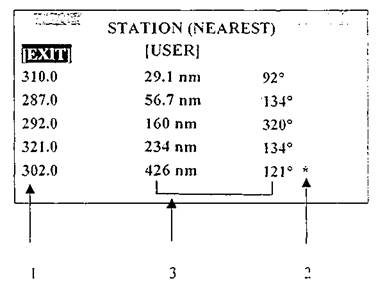
а) Следующее отображение появится на экране после нажатия клавиши ENT на шаге 6.
|
- частота работы станции, кГц.
|
|
|
- «*» означает канал пользователя.
- дальность (только для справки) и пеленг от судна на станцию.
в) Выберите желаемую станцию с помощью клавиши-педали «курсор».
с) Нажмите клавишу ЕNT.
8. Нажмите дважды клавишу MENU для окончания работ по этой процедуре.
Программирование каналов (станций) пользователя системы DGPS
Пользователь может запрограммировать 20 станций системы DGPS, из которых может производиться выбор. Всякий раз, когда новая станция создаётся, нужно включить её в этот перечень.
Нажмите один или два раза клавишу MENU.
Выберите DGPS/WAAS и нажмите клавишу ENT.
Выберите DGPS STATION и нажмите клавишу ENT.
Выберите LIST и нажмите клавишу ENT.
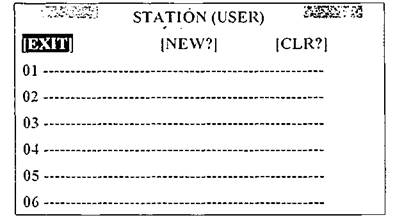
5. Выберите USER и нажмите клавишу ENT.
|
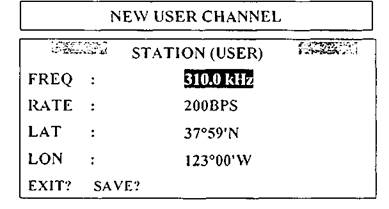
6. Выберите NEW? и нажмите клавишу ENT. Появится следующее изображение:
|
Нажмите клавишу ENT, введите частоту станции и затем снова нажмите клавишу ENT.
Нажмите клавишу ENT, введите скорость телеграфной передачи (боды) станции, а затем нажмите клавишу ENT.
Нажмите клавишу ENT, введите широту станции и нажмите клавишу ЕNT.
10. Нажмите клавишу ENT, введите долготу станции и снова нажмите клавишу ENT.
11. Выберите SAVE? и нажмите клавишу ЕNT.
12. Нажмите дважды клавишу MENU для окончания работ по процедуре.
|
|
|
Редактирование каналов пользователя системы DGPS
Нажмите один или два раза клавишу MENU для открытия меню.
Выберите WAAS/DGPS и нажмите клавишу ENT.
Выберите DGPS STATION и нажмите клавишу ENT.
Выберите LIST и нажмите клавишу ENT.
Выберите USER и нажмите клавишу ENT.
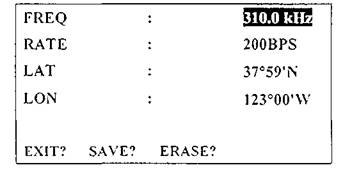
Выберите станцию из перечня и нажмите клавишу ENT. На экране дисплея появится изображение:
|
Выберите позицию, нажмите клавишу ENT, отредактируйте данные и нажмите клавишу ENT.
Выберите SAVE? нажмите клавишу ENT.
Нажмите дважды клавишу MENU для окончания работ по данной процедуре.
Удаление всех каналов пользователя системы DGPS
Нажмите два раза клавишу MENU для открытия меню.
Выберите DGPS/WAAS и нажмите клавишу ENT.
Выберите DGPS STATION и нажмите клавишу ENT.
Выберите LIST и нажмите клавишу ENT.
Выберите USER и нажмите клавишу ENT.
Выберите CLR? и нажмите клавишу ENT.
Появится следующее сообщение:
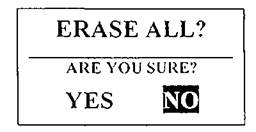
|
Нажмите курсорную клавишу для выбора YES, а затем нажмите клавишу ENТ.
Нажмите клавишу ENT для удаления всех каналов пользователя.
Удаление индивидуальных каналов пользователя
Нажмите два раза клавишу MENU для открытия меню.
Выберите DGPS/WAAS и нажмите клавишу ENT.
Выберите DGPS STATION и нажмите клавишу ENT.
Выберите LIST и нажмите клавишу ENT.
|
|
|
Выберите USER и нажмите клавишу ENT.
Выберите канал из перечня и нажмите клавишу ENT.
Выберите ERASE?
Выберите YES, и нажмите клавишу ENT.
Нажмите клавишу ENT для окончания работы по данной процедуре.
Вид пеленга
Курс судна и пеленг на путевую точку могут быть отображены в истинном или магнитном виде. Магнитный пеленг равен истинному пеленгу плюс (или минус) магнитное склонение. Используйте показания пеленга в соответствии с подключенным компасом: магнитный для магнитного компаса и истинный для гирокомпаса. Настройка по умолчанию отображает магнитные пеленги.
Нажмите один или два раза клавишу MENU для открытия меню.
Выберите PLOTTER.
Нажмите клавишу ENT. ;
Выберите BRG.REF.
Нажмите клавишу ENT. Появится следующее окно:

|
Выберите MAG (магнитный) или TRUE (истинный).
Нажмите клавишу ENT.
Нажмите дважды клавишу MENU для окончания работ по этой процедуре.
Ручной ввод магнитного склонения
Расположение магнитного полюса Земли отличается от географического северного полюса. Это обуславливает разницу между истинным и магнитным направлениями на север. Эта разница называется магнитным склонением, которое меняется в зависимости от точки наблюдения на земле. Прибор запрограммирован заранее на все магнитные склонения планеты. Однако допустим ручной ввод величины магнитного склонения для повышения точности наблюдений. Когда выбрана опция MAG в поле BRG.REF, используйте магнитное склонение.
Нажмите один или два раза клавишу MENU.
Выберите PLOTTER и нажмите клавишу ENT.
Выберите поле MAG.VAR.
Нажмите клавишу ENT.
Выберите AUTO или MAN и нажмите клавишу ENT. Для автоматического выбора магнитного склонения справа от AUTO появится текущее магнитное склонение.
Если выбрано AUTO, то нужно перейти к шагу 7. Для режима MAN нажмите клавишу ENT и введите магнитное склонение по следующей процедуре:
а) Если необходимо, то измените координаты с восточных на западные или наоборот нажатием курсорной клавиши.
в) Нажмите курсорную клавишу для смещения курсора, используйте её для установки величины магнитного склонения согласно данным откорректированных навигационных карт
с) Нажмите клавишу ENT.
7. Нажмите дважды клавишу MENU для окончания работ по этой процедуре.
Выбор геодезической основы
Приёмоиндикатор заранее запрограммирован для распознавания большей части основных картографических систем Земли. Хотя система WGS-84 является стандартом GPS, в настоящее время широко используется другие виды картографических систем. Выберите нужную систему морских карт как описано ниже.
Нажмите один или два раза клавишу MENU для открытия меню.
Выберите SYS SETUP и нажмите клавишу ENT.
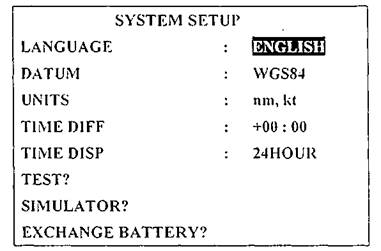
|
Выберите DATUM и нажмите клавишу ENT.
Выберите WGS-84 (стандарт GPS), WGS-72 или OTHER в зависимости от того, что подходит и нажмите клавишу ENT.
Если выбраны WGS-72 или WGS-84, то перейдите к шагу 6. Если выбрано OTHER, то проделайте следующие операции:
а) Нажмите клавишу ENT.
в) Выберите с помощью курсорной клавиши номер геодезической основы морской карты согласно табл. 3.
с) Нажмите клавишу ENT.
6. Нажмите дважды клавишу MENU для окончания работ по этой процедуре.
Таблица 3
Перечень систем геодезических основ Земли
| № | Name | Area |
| WGS-84 | ||
| WGS-72 | ||
| TOKYO | Mean Value (Japan, Korea & Okinawa) | |
| NORTH AMERICAN 1927 | Mean Value (CONUS) | |
| EUROPEAN 1950 | Mean Value | |
| AUSTRALIAN GEODETIC 1984 | Australia & Tasmania | |
| ADINDAN | Mean Value (Ethiopia & Sudan) | |
| Ethiopia | ||
| Mali | ||
| Senegal | ||
| Sudan | ||
| AFG | Somalia | |
| AINELABD 1970 | Bahrain island | |
| ANNA 1 ASTRO 1965 | Cocos island | |
| ARC 1950 | Mean Value | |
| Botswana | ||
| Lesolho | ||
| Maiawi | ||
| Swazland | ||
| Zaire | ||
| Zambia | ||
| Zimbabwe | ||
| ARC 1960 | Mean Value (Kenya & Tanzania) | |
| Kenya | ||
| Tanzania | ||
| ASCENSION IS 1958 | Ascension island | |
| ASTRO BEACON OEO | Iwo Jima island | |
| ASTRO B4 SOR. ATOLL | Tern island | |
| ASTRO POS 7 1/4 | St. Helena island | |
| ASTRONOMIC STATION 1952 | Marcus island | |
| AUSTRALIAN GEODETIC 1966 | Australia & Tasmania | |
| BELLEVUE (IGN) | Elate & Erromango islands | |
| BERMUDA 1957 | Bermuda islands | |
| BOGOTA OBSERVATORY | Columbia | |
| GAUPO INCHAUSPE | Argentina | |
| CANTON ISLAND 1966 | Phoenix islands | |
| CAPE | South Africa | |
| CAPE CANAVERAL | Mean Value (Florida & Bahama islands) | |
| CARTHAGE | Tunisia | |
| CHATHAM 1971 | Chatham island (New Zealand) | |
| CHUA ASTRO | Paraguay | |
| CORREGO ALEGRE | Brazil | |
| DJAKARTA (BATAVIA) | Sumatra island (Indonesia) | |
| DOS 1968 | Gizo island (New Georgia island) | |
| EASTER ISLAND 1967 | Easter island | |
| EUROPEAN 1950 (Con’t) | Western Europe | |
| Cyprus | ||
| Egypt | ||
| England, Scotland, Channel & Shetland islands | ||
| England, Ireland, Scotland & Shetland islands | ||
| Greece | ||
| Iran | ||
| Italy, Sardinia | ||
| Italy, Sicily | ||
| Norway & Finland | ||
| Portugal & Spain | ||
| EUROPEAN 1979 | Mean Value | |
| GAUNDAJIKA BASE | Republic of Maldives | |
| GEODETIC DATUM 1949 | New Zealand | |
| GUAM 1963 | GUAM ISLAND | |
| GUX 1 ASTRO | Guadalcanal island | |
| HJORSEY 1955 | Iceland | |
| HONG KONG 1963 | Hong Kong | |
| INDIAN | Thailand & Vietnam | |
| Bangladesh, India & Nepal | ||
| IRELAND 1965 | Ireland | |
| ISTS 073 ASTRO 1969 | Diego Garcia | |
| JOHNSTON ISLAND 1961 | Johnston island | |
| KANDAWALA | Sri Lanka | |
| KERGUELEN ISLAND | Kerguelen island | |
| KERTAU ISLAND | West Malaysia & Singapore | |
| LA REUNION | Mascarene island | |
| L. C. 5 ASTRO | Cayman Brac island | |
| LIBERIA 1964 | Liberia | |
| LUZON | Philippines (exclude Mindanao island) | |
| Mindanao island | ||
| MAHE 1971 | Mahe island | |
| MARCO ASTRO | Salvage islands | |
| MASSAWA | Eritrea (Ethiopia) | |
| MERCHICH | Morocco | |
| MIDWAY ASTRO 1961 | Midway island | |
| MINNA | Nigeria | |
| NAHRWAN | Masirah island (Oman) | |
| United Arab Emirates | ||
| Saudi Arabia | ||
| NAMIBIA | Namibia | |
| MAPARIMA, BWI | Trinidad & Tobago | |
| NORTH AMERICAN 1927 | Western United States | |
| Eastern United States | ||
| Alaska | ||
| Bahamas (exclude San Salvador island) | ||
| Bahamas, San Salvador island | ||
| Canada (include Newfoundland island) | ||
| Alberta & British Columbia | ||
| East Canada | ||
| Manitoba & Ontario | ||
| Northwest territories & Saskatchewan | ||
| Yukon | ||
| Canal Zone | ||
| Caribbean | ||
| Central America | ||
| Cuba | ||
| Greenland | ||
| Mexico | ||
| NORTH AMERICAN 1983 | Alaska | |
| Canada | ||
| CONUS | ||
| Mexica, central America | ||
| OBSERVATORIO 1966 | Corvo & Flores island (Azores) | |
| OLD EGYPTIAN 1930 | Egypt | |
| OLD HAWAIIAN | Mean Value | |
| Hawaii | ||
| Kauai | ||
| Maui | ||
| Oahu | ||
| OMAN | Oman | |
| ORDNANCE SURVEY OF GREAT BRITAN 1936 | Mean Value | |
| England | ||
| England, isle of Man & Wales | ||
| Scotland & Shetland islands | ||
| Wales | ||
| PICO DE LAS NIVIES | Canary islands | |
| PITCAIRN ASTRO 1967 | Pitcairn island | |
| PROVISIONS SOUTH CHILEAN 1963 | South Chile (near 53°S) | |
| PROVISIONAL SOUTH AMERICAN 1956 | Mean Value | |
| Bolivia | ||
| Chile – Northern Chile (near 19°S) | ||
| Chile – Southern Chile (near 43°S) | ||
| Columbia | ||
| Ecuador | ||
| Guyana | ||
| Peru | ||
| Venezuela | ||
| PUERTO RICO | Puerto Rico & Virgin islands | |
| QATAR NATIONAL | Qatar | |
| QORNOO | South Greenland | |
| ROME 1940 | Sardinia islands | |
| SANTA BRAZ | Sao Maguel, Santa Maria islands (Azores) | |
| SANTO (DOS) | Espirito Santo island | |
| SAPPER HILL 1943 | East Falkland islands | |
| SOUTH AMERICAN 1969 | Mean Value | |
| Argentina | ||
| Bolivia | ||
| Brazil | ||
| Chile | ||
| Columbia | ||
| Ecuador | ||
| Guyana | ||
| Paraguay | ||
| Peru | ||
| Trinidad & Tobago | ||
| Venezuela | ||
| SOUTH ASIA | Singapore | |
| SOUTHEAST BASE | Porto Santo & Madeira islands | |
| SOUTHWEAST BASE | Faial, Graciosa, Pico, Sao, Jorge & Terceira islands | |
| TIMBALAI 1948 | Brunei & East Malaysia (Sarawak & Sadah) | |
| TOKYO | Japan | |
| Korea | ||
| Okinawa | ||
| TRISTAN ASTRO 1968 | Tristan da Cunha | |
| VITI LEVU 1916 | Viti Levu island (Fiji islands) | |
| WAKE-ENIWETOK 1960 | Marshall islands | |
| ZANDERIJ | Surinam | |
| BUKIT RIMPAH | Bangka & Belitung islands (Indonesia) | |
| CAMP AREA ASTRO | Camp Momurdo Area, Antarctica | |
| G. SEGARA | Kalimantan island (Indonesia) | |
| HEART NORTH | Afghanistan | |
| HU-TZU-SHAN | Taiwan | |
| TANANARIVE OBSERVATORY 1925 | Madagascar | |
| YACARE | Uruguay | |
| RT-90 | Sweden | |
| Pulkovo 1942 | Russia | |
| FINNISH KKJ | Finland |
Единицы измерения
Расстояние/скорость могут быть отображены на экране в морских милях/узлах, километрах/километрах в час или же в милях/милях в час.
Нажмите один или два раза клавишу MENU.
Выберите SYS SETUP и нажмите клавишу ENT.
Выберите UNITS
Нажмите клавишу ENT.
Выберите желаемую комбинацию: морские (nm), узлы (kt); километры (km), километры в час (km/h); мили (sm), мили в час (mph).
Нажмите клавишу ENT.
Нажмите дважды клавишу MENU для окончания работ по этой процедуре.
Формат отображения координат местоположения
Координаты местоположения могут быть отображены в виде широты и долготы (Lat/Lon), единицах TD (РНС Loran-с и Decca) с использованием процедуры:
Нажмите один или два раза клавишу MENU для открытия меню.
Выберите ТD SETUP и нажмите клавишу ENT.
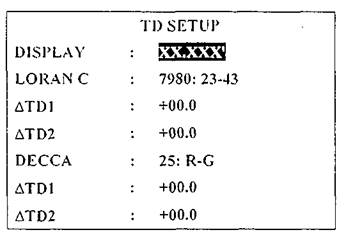
|
3. Курсор устанавливается на первой строчке. Нажмите клавишу ENT. Появится следующее окно:
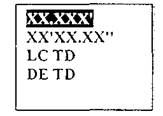
|
4. Выберите желаемый формат координат места.
хх.ххх’: Показывает координаты местоположения Lat/Lon без указания секунд.
хх'хх.х": Отображает координаты местоположения Lat/Lon с указанием секунд.
LC TD: координаты Loran-c.
DE TD: координаты в системе DECCA.
Нажмите клавишу ENT. Если выбраны координаты по широте и долготе, то перейдите на шаг 7.
Для координат систем Loran-с или Decca проделайте одну из следующих процедур, а затем перейдите к шагу 7.
Loran-с
а) Курсор находится на поле системы Loran-с. Нажмите клавишу ENT. в) Используя курсорную клавишу, выберите код GRI и вторичные коды, обращаясь к перечню цепочек системы Loran-с (табл. 4).
Нажмите клавишу ENT.
Если необходимо, то введите поправки координат TD ∆TD1 и ∆TD2 для повышения точности позиционирования.
Decca
а) Выберите поле Decca и нажмите клавишу ЕNT.
в) Используя курсорную клавишу, выберите номер цепочки Decca и пару фазовых дорожек (R. Red = красный; G. Green = зеленый; P. Purple = фиолетовый), обращаясь к перечню цепочек системы Decca (табл. 5).
с) Нажмите клавишу ENT.
d) Если необходимо, то введите поправки координат TD ∆TD1 и ∆TD2 для повышения точности позиционирования.
7. Нажмите дважды клавишу MENU для окончания работ по этой процедуре.
Таблица 4
Цепочки системы LORAN-С
| Name of Chain | GRI | S1 | S2 | S3 | S4 | S5 |
| Central Pacific | 4990 | 11 | 29 | — | — | — |
| Canadian Hast Coast | 5930 | 11 | 25 | 38 | — | — |
| Commando Lion (Korea) | 5970 | 11 | 31 | 42 | — | — |
| Canadian West Coast | 5990 | 11 | 27 | 41 | — | — |
| South Saudi Arabia | 7170 | 11 | 26 | 39 | 52 | — |
| Labrador Sea | 7930 | 11 | 26 | — | — | — |
| Eastern Russia | 7950 | 11 | 30 | 46 | 61 | — |
| Gulf of Alaska | 7960 | 11 | 26 | 44 | — | — |
| Norwegian Sea | 7970 | 11 | 26 | 46 | 60 | — |
| Southeast USA | 7980 | 11 | 23 | 43 | 59 | — |
| Mediterranean Sea | 7990 | 11 | 29 | 47 | — | — |
| Western Russia | 8000 | 10 | 25 | 50 | 65 | — |
| North Central USA | 8290 | 11 | 27 | 42 | — | — |
| North Saudi Arabia | 8990 | 11 | 25 | 40 | 56 | 69 |
| Great Lakes | 8970 | 11 | 28 | 44 | 59 | — |
| South Central USA | 9610 | 11 | 25 | 40 | 52 | 65 |
| West Coast USA | 9940 | 11 | 27 | 40 | — | — |
| Northeast USA | 9960 | 11 | 25 | 39 | 54 | — |
| Northeast Pacific (old) | 9970 | 11 | 30 | 55 | 81 | — |
| Icelandic | 9980 | 11 | 30 | — | — | — |
| North Pacific | 9990 | 11 | 29 | 43 | — | — |
| Suez | 4991 | 10 | 24 | |||
| England, France | 8940 | 12 | 30 | |||
| Northwest Pacific | 8930 | 11 | 30 | 50 | 70 | |
| Newfoundland East Coast | 7270 | 11 | 25 | |||
| Lessay | 6731 | 10 | 39 | |||
| ВØ | 7001 | 11 | 27 | |||
| Sylt | 7499 | 11 | 26 | |||
| Ejde | 9007 | 10 | 23 | 38 | ||
| Saudia Arabian North | 8830 | 11 | 25 | 39 | 56 | |
| Saudia Arabia South | 7030 | 11 | 25 | 37 | 55 |
Таблица 5
Цепочки системы DECCA
| Dec. № of Chain | Hex. № of Chain | Name of Chain | Location |
| 01 | 0A | South Baltic | Europe |
| 02 | 0E | Vestlandet | “–“ |
| 03 | 1B | Southwest British | “–“ |
| 04 | 2A | Northumbrian | “–“ |
| 05 | 2E | Holland | “–“ |
| 06 | 3B | North British | “–“ |
| 07 | 3E | Lofoten | “–“ |
| 08 | 3F | “–“ | |
| 09 | 4B | North Baltic | “–“ |
| 10 | 4C | North West | “–“ |
| 11 | 4E | Trondelag | “–“ |
| 12 | 5B | English | “–“ |
| 13 | 5F | North Bothnian | “–“ |
| 14 | 6A | Southern Spanish | “–“ |
| 15 | 6C | North Scottish | “–“ |
| 16 | 6E | Gulf of Finland | “–“ |
| 17 | 7B | Danish | “–“ |
| 18 | 7D | Irish | “–“ |
| 19 | 7E | Finnmark | “–“ |
| 20 | 8B | French | “–“ |
| 21 | 8C | South Bothnian | “–“ |
| 22 | 8E | Hebridenn | “–“ |
| 23 | 9B | Frisian Island | “–“ |
| 24 | 9E | Helgeland | “–“ |
| 25 | 10B | Skagerrak | “–“ |
| 26 | 5C | North Persian Gulf | Persian Gulf & India |
| 27 | 1C | South Persian Gulf | “–“ |
| 28 | 7B | Bombay | “–“ |
| 29 | 8B | Calcutta | “–“ |
| 30 | 6C | Bangladesh | “–“ |
| 31 | 2F | Saliyah | “–“ |
| 32 | 9C | Hokkaido | Japan |
| 33 | 6C | Tohoku | “–“ |
| 34 | 8C | Kanto | “–“ |
| 35 | 4C | Shikoku | “–“ |
| 36 | 2C | Hokuriku | “–“ |
| 37 | 7C | Kita Kyushu | “–“ |
| 38 | 4A | Namaqualand | Southern Africa |
| 39 | 6A | Cape | “–“ |
| 40 | 8A | Eastern Province | “–“ |
| 41 | 9C | South West Africa | “–“ |
| 42 | 10C | Natal | “–“ |
| 43 | 8E | Dampier | Australia |
| 44 | 4A | Port Headland | “–“ |
| 45 | 9C | Anticosti | Northern America |
| 46 | 2C | East Newfoundland | “–“ |
| 47 | 6B | Cabot Strait | “–“ |
| 48 | 7C | Nova Scotia | “–“ |
Формат отображения времени
Система GPS использует время UTC (всемирное скоординированное время). Если возникает потребность в использовании местного времени, то введите разницу по времени (диапазон: от -13:30 до +13:30) между местным временем и временем UTC. Допускается отображение в формате 12 или 24 часов.
Нажмите один или два раза клавишу MENU.
Выберите SYS SETUP и нажмите клавишу ENT.
Нажмите курсорную клавишу для выбора поля TIME DIFF и нажмите затем клавишу ENT.
Нажмите курсорную клавишу для отображения «+» или «-».
Введите разницу по времени с помощью той же клавиши.
Нажмите клавишу ENT.
Курсор устанавливается на поле TIME DISP. Нажмите клавишу ENT.
Выберите 12 HOUR или 24 HOUR (по своему усмотрению), а затем нажмите клавишу ENT.
Нажмите дважды клавишу MENU для окончания работ по этой процедуре.
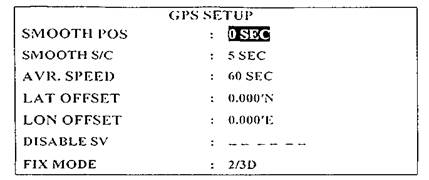
Меню GPS SETUP
Меню GPS SETUP сглаживает координаты местоположения и курс, осредняет скорость, использует смещение местоположения и отключает неисправный спутник и пр.
Нажмите один или два раза клавишу MENU.
Выберите GPS SETUP и нажмите клавишу ENT.
|
Выберите позицию и нажмите клавишу ENT.
Измените настройку с помощью курсорной клавиши и нажмите клавишу ENT.
Нажмите дважды клавишу MENU для окончания работ по этой процедуре.
SMOOTH POS ( сглаживание координат местоположения)
Когда величина DOP (Dilution of Precision – уменьшение точности, показатель для точности определения координат местоположения) или условие приема являются неблагоприятными, координаты места в системе GPS могут значительно колебаться, даже если судно остается неподвижным. Эти изменения могут быть уменьшены применением метода сглаживания. Диапазон настройки находится от 0 (сглаживание отсутствует) до 999 секунд. Чем выше значение, тем больше сглаживаются необработанные данные; однако слишком высокая настройка замедляет время обработки. Это особенно заметно для больших скоростей судна. 0 является нормальной настройкой; увеличьте настройку, если определенное с помощью GPS место судна меняется значительно.
SMOOTH S/C ( сглаживание скорости/курса)
Во время определения координат скорость судна и курс измеряются непосредственно путём приема сигналов спутника системы GPS. «Сырые» (необработанные) данные по скорости могут изменяться случайным образом в зависимости от условий приема и других факторов. Можно уменьшить эти случайные вариации путем увеличения степени сглаживания. По аналогии со сглаживанием по широте и долготе чем выше скорость сглаживания скорости и курса, тем в большей степени сглаживаются данные при замедлении времени обработки данных. Диапазон настройки лежит между 0 (сглаживание отсутствует) и 9999 секундами.
A VR. SPEED ( осреднение скорости)
Вычисление ЕТА, TTG и др. базируется на осреднении скорости судна для заданного периода. Если период слишком большой или слишком короткий, то это может привести к ошибке вычислений. Измените эту настройку, если возникает ошибка вычислений. Настройкой по умолчанию является одна минута. Диапазон настройки колеблется между 0 (осреднение отсутствует) и 9999 секундами.
LAT/LON OFFSET (корректировка координат)
Можно применить операцию корректировки координат по широте и долготе, которые рассчитываются приёмоиндикатором, чтобы увеличить точность определения. При этом значения поправок должно быть априорно известно.
DISABLE SV ( отключение спутника).
Каждый спутник системы GPS транслирует свои эфемеридные характеристики в альманах системы, который содержит общие орбитальные данные обо всех спутниках системы GPS. Используя эту информацию приёмник системы GPS автоматически исключает любой неисправный спутник из таблицы спутников системы GPS. Однако альманах в некоторых случаях может не содержать эту информацию. Поэтому допустимо ручное исключение неработающих спутников. Для этого введите номер спутника, составленный из двух цифр, и нажмите клавишу ENT. Для восстановления спутника в состав используемых введите «00».
DISABLE GEO (отключение спутника GEO)
По аналогии со спутниками GPS, приёмник GPS устраняет автоматически любой неисправный спутник WAAS. Для ручного отключения спутника WAAS введите трёхзначный номер спутника с помощью курсорной клавиши, а затем нажмите клавишу ENT. Для восстановления спутника введите «000».
FIX MODE (режим определения местоположения)
В этом режиме осуществляется выбор метода определения координат местоположения судна: 2D (двухмерные координаты) или 2/3D (двух/трёхмерные координаты). Для определения двухмерных координат необходимо, чтобы в поле зрения приёмоиндикатора были как минимум три спутника. Для случая 2/3D необходимо, чтобы в поле зрения приемника системы GPS было не менее 4 спутников. Когда выбран режим 2D, введите высоту антенны над уровнем водной поверхности с целью получения более точных данных о координатах места. В режиме настройки по умолчанию эта высота принимается равной 5 м.
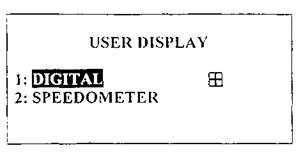
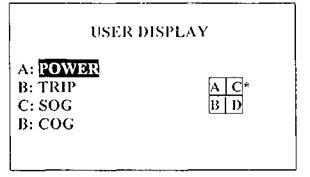
Настройка дисплея пользователя
Отображение экрана пользователя, которое выбирается клавишей DISP, может быть либо в виде цифровых данных, либо в виде отображения «спидометр».
Цифровые данные
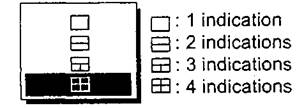
Пользователь может выбрать от 1 до 4 позиций навигационных данных для отображения в цифровом режиме.
Нажмите один или два раза клавишу MENU для открытия меню.
Выберите USER DISP, а затем нажмите клавишу ENT.
|
3. Выберите 1 или 2, а затем нажмите клавишу ENT.
|
Сделайте выбор DIGITAL, а затем нажмите клавишу ENT.
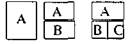
5. Курсор устанавливается на квадрат в правой стороне экрана. Нажмите клавишу ENT.
|
6. Выберите желаемое разделение экрана (количество данных для отображения), а затем нажмите клавишу ENT. Изображение на экране будет выглядеть так:
|
|
7. Сделайте выбор «А». Нажмите клавишу ENT.
|
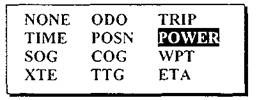
8. Используя курсорную клавишу, выберите желаемые данные, а затем нажмите клавишу ENT.
NONE: Нет отображения
ODO : Расстояние по одометру
TRIP : Расстояние перехода
TIME : Время и дата
POSN : Координаты места
POWER : Напряжение источника питания
SOG : Скорость относительно грунта
COG : Курс относительно грунта
WPT : Дальность (Rng) и пеленг (Brg) до путевой точки
ХТЕ : Ошибка пересечения пути
TTG : Время на переход (до пункта назначения)
ЕТА : Оценочное время прибытия (в пункт назначения)
9. При выборе «В» кнопка управления возвращается в положение отображения пользователя. В зависимости от варианта выбора, сделанного на шаге 5, установите другие индикации, подобно тому, как описано для выбора «А».
10. Нажмите дважды клавишу MENU для окончания работы по данной процедуре.
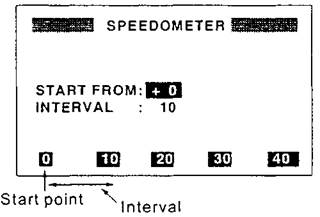
Отображение «спидометр»
1. Нажмите один или два раза клавишу MENU для открытия меню.
Сделайте выбор USER DISP, а затем нажмите клавишу ENT.
Выберите 1 или 2, а затем нажмите клавишу ENТ.
Выберите SPEEDOMETER и затем нажмите клавишу ENT.
|
Курсор устанавливается на START FROM. Нажмите клавишу ENT.
Введите скорость старта (используйте курсорную клавишу влево-вправо для выбора места и вверх-вниз для ввода величины и переключения с плюса на минус и наоборот. Диапазон настройки составляет - 99 до + 99).
Нажмите клавишу ENT, курсор смещается на INTERVAL.
Нажмите клавишу ENT.
Введите интервал масштаба (используйте курсорную клавишу влево-вправо для выбора места и вверх-вниз для введения величины). Диапазон настройки составляет 1 – 99.
Нажмите клавишу ENT.
Нажмите дважды клавишу MENU для закрытия меню.
Сброс отсчёта расстояния перехода и расстояния по одометру
Нажмите клавишу MENU один или два раза для открытия меню.
Сделайте выбор ERASE и затем нажмите клавишу ENT.
Выберите RESET TRIP? или RESET ODOMETER?, а затем нажмите клавишу ENT. На экране появится одно из следующих изображений:
|

|
Нажмите курсорную клавишу для выбора YES, а затем сбросьте (занулите) отсчёт нажатием клавиши ENT.
Нажмите дважды клавишу MENU для окончания работы по данной процедуре.
Спутниковый монитор
Спутниковый монитор информирует о состоянии используемых и видимых спутников.
Нажмите клавишу MENU.
Выберите SATELLITE.
На экране появится следующая информация
|
Эта информация отражает все видимые спутники системы GPS и один геостационарный спутник (систем WAAS, EGNOS или MSAS), используемый для передачи дифференциальных поправок. При этом спутники, используемые для обсервации показываются инверсно (белые цифры на чёрном фоне), а остальные в обычном изображении. Схематично показывается их разброс относительно наблюдателя как по пеленгу, так и по углу наклонения. Уровень сигнала спутника оценивается по длине затемнённой полосы индикатора (для устойчивого сигнала она должна быть не короче расстояния до первой вертикальной линии). Высота антенны является расчётной величиной (только для режимов х3D). Она показывает возвышение антенны над уровнем опорного эллипсоида, который используется в качестве земной модели для данной геодезической основы. Значение геометрического фактора (DOP) рассчитано для всех используемых спутников.
Язык
Для работы с прибором можно использовать несколько языков интерфейса.
Нажмите клавишу MENU.
Выберите SYS SETUP, а затем нажмите клавишу ENT.
Курсор устанавливается на LANGUAGE. Нажмите клавишу ENT.
|
3. Выберите желаемый язык, а затем нажмите клавишу ENT.
4. Нажмите дважды клавишу MЕNU для окончания работы поданной процедуре.
Примечание: При смене языка единицы измерения расстояния и скорости, а также поправки к всемирному координированному времени устанавливаются согласно табл. 6.
Таблица 6
Установки по умолчанию для различных языков интерфейса
| Язык | Единица измерения | Разница времени |
| Английский | Морские мили, узлы | 0:00 |
| Немецкий | Морские мили, узлы | 0:00 |
| Французский | Км, км/час | 0:00 |
| Испанский | Морские мили, узлы | +2:00 |
| Итальянский | Морские мили, узлы | + 1:00 |
| Португальский | Морские мили, узлы | -3:00 |
| Голландский | Морские мили, узлы | 0:00 |
| Вьетнамский | Морские мили, узлы | +7:00 |
| Японский | Морские мили, узлы | +9:00 |
РЛС Печора
Назначение, технические характеристики и состав комплекта
Судовые навигационные радиолокационные станции кругового обзора серии «Печора» предназначены для установки на судах второй и третьей групп по классификации Регистра.
Серия состоит из двух модификаций – «Печора 1» и «Печора 2». Первая работает только в режиме относительного движения, комплектуется антенной с шириной диаграммы направленности в горизонтальной плоскости 1.9° и индикатором на ЭЛТ диаметром 230 мм.
Вторая имеет антенну с диаграммой направленности в горизонтальной плоскости 0.8° и индикатор на ЭЛТ диаметром 310 мм. Кроме того, она предусматривает сопряжение с прибором истинного движения (прибор Д), что обеспечивает ей режим относительного и истинного движения, сопряжение с устройством «Ольха» для безопасного расхождения судов, а также укомплектована накладным отражательным планшетом, позволяющим решать задачи по расхождению судов.
Все станции серии имеют максимальную дальность действия 48 миль, работают на волне 3.2 см (частота 9430 МГц), излучают радиоимпульсы мощностью не менее 12 кВт. РЛС имеют по 8 шкал дальности : 0.5, 1.0, 2.0, 4.0, 8.0, 16.0, 32.0, 48.0 миль при цене деления неподвижных меток дальности 0.25, 0.25, 0.5, 1.0, 2.0, 4.0, 8.0, 12.0 миль соответственно. Скорость кругового обзора (частота вращения антенны) составляет 24 об/мин. Длительность излучаемого импульса равна 0.07 мкс на шкалах 0.5 и 1.0 мили при частоте следования 3400 имп/с, 0.25 мкс на шкалах 2.0 и 4.0 мили при частоте следования 1700 имп/с, 0.7 мкс на шкалах 8.0, 16.0, 32.0, 48.0 миль при частоте следования 850 имп/с.
В станциях возможна ориентировка изображения по курсу и меридиану, на шкалах 1.0–8.0 миль возможно смещение центра развертки до 2/3 радиуса экрана в любую точку.
Для измерения угловых положений целей имеются механический и электронный визиры направления. Измерения расстояний осуществляется с помощью неподвижных меток и подвижного визира дальности. Отсчёты направлений электронного визира и расстояний подвижного визира дальности выдаются на цифровых табло.
РЛС имеет радиоприёмник с логарифмической амплитудной характеристикой, чувствительность приёмника не хуже 120 дБ/Вт. В качестве гетеродина используется генератор на диоде Ганна с ручной и автоматической подстройкой частоты. Промежуточная частота 60 МГц. Для борьбы с помехами от волнения и атмосферных осадков служат малая постоянная времени (МПВ) и временная автоматическая регулировка усиления (ВАРУ).
РЛС имеют максимальную дальность обнаружения при вероятности 0.8 и при высоте антенны 15 м не менее 20 миль для берега высотой 60 м, не менее 10 миль для судна вместимостью 5000 т и не менее 3 миль для среднего морского буя без радиолокационного отражателя.
Разрешающая способность по дальности не хуже 25 м. Погрешность измерения дальности не более 25 м. Разрешающая способность по направлению для РЛС «Печора 1» не хуже 2°, для РЛС «Печора 2» не хуже 1°. Предельная погрешность измерения направления с помощью механического визира–1°, с помощью электронного–0.8°.
Погрешность индикации движения собственного судна в режиме истинного движения составляет по скорости не более ±5% и по углу не более ±2.5°.
Мощность потребляемая от бортовой сети при питании переменным током напряжением 220 В и частотой 50 Гц составляет 620 Вт, при питании постоянным током напряжением 27 В – 480 Вт.
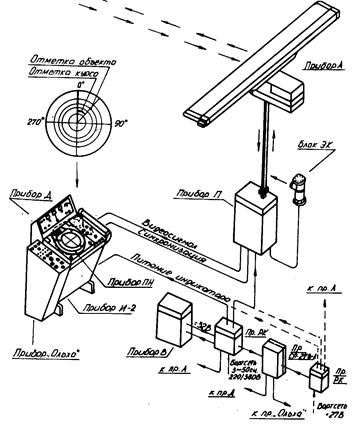
В комплект РЛС серии «Печора» входят следующие основные приборы (рис. 9, 10):
прибор И – индикатор;
прибор А – антенное устройство;
прибор П – приёмопередатчик;
вспомогательные приборы:
прибор В – сетевой выпрямитель;
прибор РК– распределительная коробка;
источники питания для переменного и постоянного тока;
прибор ЭК – эхокамера.
Кроме перечисленных, в состав РЛС «Печора 2» дополнительно могут входить:
прибор Д – устройство истинного движения;
|
Рис. 9. Комплект РЛС Печора 1
прибор «Ольха» – устройство для безопасного расхождения судов;
прибор ПН – накладной планшет, необходимый для ведения ручной радиолокационной прокладки (на рисунке не показан).
|
Рис. 10. Комплект РЛС Печора 2
Функциональная схема
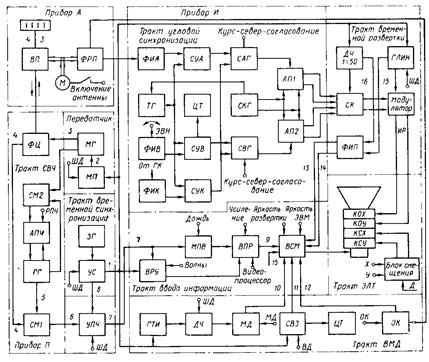
Функциональная схема РЛС представлена на рис. 11 основными приборами.
|
Рис. 11. Схема РЛС Печора
Прибор П содержит: тракт временной синхронизации, передатчик, тракт сверхвысокой частоты СВЧ и усилитель промежуточной частоты УПЧ, образующие приёмник.
Прибор А включает: антенное устройство А с вращающимся переходом ВП, фотоэлектронный растровый преобразователь ФРП и двигатель вращения антенны М.
В состав прибора И входят: тракт угловой синхронизации, тракт временной развертки, тракт ввода информации, тракт визира и меток дальности ВМД и тракт ЭЛТ.
П р и е м о п е р е д а т ч и к. Временная синхронизация работы станции осуществляется от задающего генератора ЗГ, который вырабатывает запускающие импульсы с частотой следования 3400 имп/с. С помощью делителя частоты в блоке управления и синхронизации УС частота следования импульсов запуска приводится к 1700 или 850 имп/с. Изменение частоты производится с пульта управления переключателем шкал дальности ШД. Кроме того, в блоке УС осуществляется необходимая временная задержка импульсов для синхронизации прибора И, ВАРУ, схемы УПЧ и запуска модулятора передатчика.
При поступлении запускающих импульсов на модулятор передатчика МП в нем формируются импульсы высокого напряжения, длительность которых регулируется переключателем ШД. Магнетронный генератор МГ под действием импульсов модулятора вырабатывает импульсы СВЧ, которые с помощью ферритового циркулятора ФЦ тракта СВЧ поступают через вращающийся переход ВП в антенну и излучаются в пространство. Отраженные от объектов импульсы СВЧ принимаются той же антенной в паузах между импульсами излучения и направляются в смеситель СМ1, где с помощью непрерывных немодулированных колебаний, вырабатываемых гетеродином на диоде Ганна ГГ, преобразуются в импульсы промежуточной частоты. В каскадах блока УПЧ, имеющего линейно–логарифмическую характеристику, эти колебания усиливаются и одновременно детектируются. С выхода УПЧ видеоимпульсы поступают в индикатор. Для защиты УПЧ от излучаемого импульса осуществляется его запирание импульсом подавления, который формируется в УПЧ под воздействием импульса из блока УС.
Для поддержания постоянства промежуточной частоты в автоматическом режиме используется схема АПЧ, которая вырабатывает управляющее напряжение для гетеродина. Это напряжение подстраивает гетеродин ГГ до тех пор, пока разностная частота генератора Ганна и магнетрона на выходе смесителя СМ2 не станет равной номинальному значению 60 МГц. В режиме ручной регулировки для управления частотой гетеродина используется напряжение потенциометра РПЧ, расположенного на панели управления.
Для передачи на индикатор данных об угловом положении антенны используется фотоэлектронный растровый преобразователь ФРП, установленный на валу антенны. За один оборот антенны он вырабатывает две серии по 1800 импульсов с относительным сдвигом по фазе на 90° и специальный «нулевой» импульс, появляющийся при совпадении направления излучения антенны с диаметральной плоскостью судна. «Нулевой» импульс используется для формирования импульса отметки курса и обнуления счётчика угла антенны.
И н д и к а т о р. Основными устройствами индикатора являются тракты угловой синхронизации, временной развертки и ввода информации.
В тракт угловой синхронизации входят: формирователь импульсов антенны ФИА, тактовый генератор ТГ, счетчик угла антенны СУА, сумматор импульсов антенны и гирокомпаса САГ, блок аналоговой памяти АП1 и синусно-косинусный генератор СКГ. С помощью этих блоков формируются управляющие напряжения для модуляции пилообразных импульсов развёртки сигнала. Кроме того в тракт угловой синхронизации входят: формирователь импульсов визира ФИВ, счётчик угла визира СУВ, сумматор импульсов визира и гирокомпаса СВГ, блок аналоговой памяти АП2, с помощью которых формируются управляющие напряжения для модуляции пилообразных импульсов развёртки электронного визира направления, а также формирователь импульсов гирокомпаса ФИК со счетчиком угла компаса СУК, с помощью которых осуществляется связь с гирокомпасом.
В тракт временной развёртки входят: генератор линейно изменяющегося напряжения ГЛИН, модулятор, синхронный коммутатор СК с делителем частоты запускающих импульсов ДЧ, который на каждый 50–й ход развертки переключает модулятор с блока АП1 на блок АП2, а также формирователь импульсов подсвета ФИП.
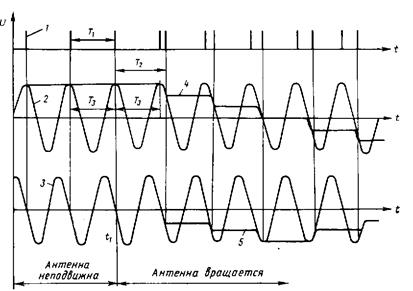
Радиальная развёртка луча осуществляется с помощью пилообразных импульсов, поступающих с модулятора на неподвижные взаимно перпендикулярные катушки КОХ и КОY. Угловое положение луча на экране ЭЛТ определяется соотношением амплитуд этих импульсов в катушках, которые в свою очередь определяются соотношением значений управляющих напряжений, выработанных блоками аналоговой памяти. Блок АП1 определяет угловое положение развертки сигнала, а блок АП2–угловое положение электронного визира направления. На каждый блок аналоговой памяти от синусно-косинусного генератора СКГ с частотой 1200 Гц подаётся по два сдвинутых по фазе на 90° синусоидальных напряжения (рис. 12). Блоки аналоговой памяти на время одного периода запоминают мгновенные значения напряжений СКГ в момент прихода импульсов антенны и визира.
При неподвижной антенне СУА считает только импульсы тактового генератора ТГ, частота которых 4.32 МГц. На выходе счётчика угла антенны СУА при его емкости 3600 имп/с в этом случае вырабатывается 1200 имп/с, так как частота импульсов и частота напряжений СКГ одинаковы (периоды Т1 и Т3 одинаковы). В связи с тем, что колебания тактового генератора синхронизированы синусно-косинусным генератором, фазовый сдвиг тактовых импульсов после счетчика угла антенны по отношению к напряжениям синусно-косинусного генератора постоянен. На выходе АП1 получаются два постоянных напряжения (линии 4 и 5 до момента t1), которые, модулируя пилообразные импульсы развёртки, дают засветку луча на одном и том же месте.
|
Рис. 12. Запоминание угла поворота антенны РЛС Печора
При вращающейся антенне к импульсам тактового генератора 1 добавляются импульсы антенны, идущие от датчика через формирователь ФИА. Период повторения импульсов СУА и период колебаний СКГ становятся неодинаковыми (периоды Т1 и Т2). Фазовый сдвиг между импульсами СУА и напряжениями СКГ меняется, и на выходе АП1 получаются два напряжения, изменяющиеся по закону синуса и косинуса угла поворота антенны (линии 4 и 5 после момента t1). За один оборот антенны вырабатывается полный цикл изменения этих напряжений.
Формирователь импульсов антенны вырабатывает 3600 импульсов за один оборот антенны, что обеспечивает передачу вращения антенны на индикатор с точностью 0.1о.
Аналогичным образом на блоке АП2 вырабатываются управляющие напряжения для электронного визира направления. В отсутствии импульсов формирователя ФИВ счетчик угла визира считает только тактовые импульсы. При емкости 3600 имп/с СУВ вырабатывает 1200 имп/с с постоянным фазовым сдвигом относительно напряжений СКГ. Блок АП2 вырабатывает два постоянных напряжения и луч визира высвечивается на одном и том же месте.
Если необходимо сделать угловое перемещение визира направления, то к импульсам тактового генератора добавляются импульсы формирователя ФИВ, полярность которых определяется направлением перемещения визира. Фазовый сдвиг между импульсами СУВ и напряжениями СКГ при этом меняется в ту или иную сторону, меняются управляющие напряжения, модулирующие амплитуды импульсов развертки визира и меняется угловое положение электронного визира направления. Угловое перемещение визира продолжается до тех пор, пока включен в работу формирователь импульсов визира.
Для связи РЛС с гирокомпасом в индикаторе установлены: формирователь импульсов гирокомпаса ФИК, счетчик угла компаса СУК, сумматор импульсов антенны и гирокомпаса САГ и сумматор импульсов визира и гирокомпаса СВГ.
Формирователь импульсов гирокомпаса преобразует аналоговые данные гирокомпаса в серию импульсов с полярностью, зависящей от направления изменения курса. На счетчике угла компаса эти импульсы суммируются с учетом знака с тактовыми импульсами и на его выходе появляются импульсы, характеризующие курс собственного судна.
В режиме «курс» изображение на экране индикатора ориентировано относительно курса своего судна, при этом блок САГ не имеет разрешения на суммирование. Аналоговая память АП1 управляется только импульсами антенны и отображает развёртку согласно с курсовым углом разворота антенны.
На блоке СВГ запрет на суммирование снят. Аналоговая память АП2 управляется импульсами визира и гирокомпаса, и положение электронного визира направления указывает на индикаторе курсовой угол, значение которого высвечивается на цифровом табло.
В режиме «север» изображение ориентировано относительно меридиана. Сумматор САГ получает разрешение на суммирование. Аналоговая память АП1 получает дополнительные импульсы от гирокомпаса, и развертка на экране индикатора дополнительно разворачивается на угол, равный истинному курсу.
Аналоговая память АП2 управляется теми же импульсами, что и в режиме «курс». Положение электронного визира направления при смене ориентировки не меняется, поэтому в режиме «север» оно будет определять истинный пеленг.
В режиме «согласование» блоки САГ и СВГ не имеют разрешения на суммирование. Изображение на экране индикатора ориентировано по курсу. Электронный визир направления используется для согласования индикатора с данными гирокомпаса. Формирователь импульсов визира изменяет состояние счетчика угла визира до тех пор, пока электронный визир направления не установится на курс судна. Отсчет курса снимается с цифрового табло.
Яркостная модуляция луча на экране ЭЛТ осуществляется через тракт ввода информации. Этот тракт содержит видеопроцессор, с помощью которого усиливаются видеоимпульсы приёмника, и видеосмеситель, на котором видеоимпульсы приёмника (эхо–сигналы) смешиваются с импульсами неподвижных меток дальности МД, подвижного кольца (визира) дальности ПВД, отметки курса ОК, подсветки основной развёртки, развёртки электронного визира направления и дополнительными импульсами от приборов, сопрягаемых с РЛС (прибор «Ольха», морской запросчик-ответчик МЗО и др.).
Импульсы подсвета развертки и развертки визира направления создаются формирователем ФИП, находящимся в тракте временной развёртки, под действием импульса развёртки ГЛИН и импульса делителя частоты ДЧ 1:50. Их яркость регулируется с помощью рукояток «яркость развертки» и «яркость ЭВН» на видеосмесителе ВСМ. Яркость вспомогательных меток регулируется в соответствующих блоках.
Видеопроцессор ВПР работает в двух режимах: автоматическом и ручном. При ручном режиме работы (клавиша «видеопроцессор» на панели управления в положении отключено) видеопроцессор работает как обычный видеоусилитель. Цепи ВАРУ и МПВ, имеющиеся в видеоусилителе и улучшающие различимость целей при наличии помех от дождя и волнения, управляются с пульта вручную.
При автоматическом режиме (клавиша «видеопроцессор» на панели управления в положении включено) цепи ВАРУ и МПВ отключаются от ручного управления и переходят на автоматическое. При этом схема МПВ работает с фиксированной постоянной времени, а схема ВАРУ вырабатывает сигнал управления, амплитуда которого изменяется автоматически в зависимости от уровня видеоимпульсов и интенсивности отражения от волн на каждом ходу развертки
Вспомогательные метки: МД, ПВД, ОК вырабатываются в тракте ВМД. Для формирования меток дальности используется генератор тактовых импульсов ГТИ (647.5 кГц) с делителем частоты ДЧ, который управляется переключателем шкал дальности и изменяет цену деления меток дальности. В блоке МД формируются метки и регулируются их яркость. Для формирования визира дальности используется схема регулируемой задержки СВЗ. Аналого-цифровой преобразователь преобразует временную задержку в цифровой код для регистрации на цифровом табло ЦТ.
Отметка курса вырабатывается в блоке ОК, на который от антенного датчика подаётся кратковременный импульс в момент прохождения луча антенны через диаметральную плоскость судна.
Смещение центра развёртки осуществляется путем подачи постоянных напряжений на катушки смещения КСХ и КСY. Управляющие напряжения на блоке смещения изменяются либо вручную рукоятками «смещение центра», либо под воздействием Д – прибора истинного движения.
Управление РЛС
Расположение органов управления РЛС приведено на рис. 13, 14.
1. Переключатель 'отключено–готовность–работа'.
2. Рукоятка 'усиление'.
3. Рукоятка ручной–автоматической подстройки частоты.
4. Рукоятка помехозащиты 'дождь'.
5. Рукоятка помехозащиты 'волны'.
6. Рукоятка регулировки яркости ЭВН.
7. Рукоятка регулировки яркости развертки.
8. Рукоятка регулировки яркости ПКД.
9. Рукоятка регулировки яркости НКД.
10. Клавиша 'смещение центра'.
11. Рукоятка 'смещение центра по X'.
12. Рукоятка 'смещение центра по Y'.
13. Переключатель 'шкала–интервал'.
14. Регулятор яркости подсвета панели управления.
15. Шкала курсов и пеленгов.
16. Клавиша 'маяк', необходимая для временного отключения засветок радиолокационных маяков–ответчиков.
17. Клавиша 'ОК', необходимая для временного отключения отметки курса.
18. Клавиша 'контроль энергетической характеристики'.
19. Клавиша 'видеопроцессор', необходимая для переключения между автоматическим и ручным способами помехозащиты.
|
Рис. 13. Панель управления РЛС Печора 1
20. Переключатель 'курс–север–согласование'.
21. Рукоятка механического визира направления.
22. Рукоятка электронного визира направления.
23. Рукоятка подвижного визира дальности.
24. Цифровое табло электронного визира направления.
25. Цифровое табло шкал дальности–интервалов.
26. Цифровое табло подвижного визира дальности.
27. Клавиша 'подогрев антенны'.
28. Индикатор усиления (качества работы РЛС).
29. Лампа 'высокое вкл.', необходимая для контроля режима 'работа' (излучения) РЛС.
30. Экран ЭЛТ.
31. Рукоятка регулировки яркости сигнала морского запросчика–ответчика.
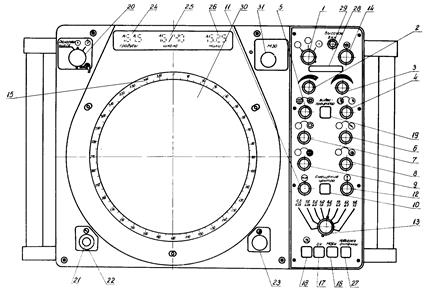
|
Рис. 14. Панель управления РЛС Печора 2
Включение РЛС в работу и регулировку в процессе работы производят в следующем порядке:
–подать на станцию напряжение бортовой сети. В приборах питания должны засветиться контрольные лампы.
–включить станцию. Для этого переключатель 'отключено–готовность–работа' установить в положение 'готовность'. После 3–4 минутного прогрева перевести его в положение 'работа'. На экране появится радиально–круговая развертка и вспомогательные метки: отметка курса, метки дальности и электронный визир направления.
–установить необходимую яркость подсветки панели, яркость развертки и яркость вспомогательных меток соответствующими органами управления (рис. 13, 14).
–проверить возможность перемещения подвижного визира дальности визуально и по цифровому табло.
–проверить возможность перемещения электронного визира направления визуально и по цифровому табло.
–проверить работу схемы ориентировки изображения и провести согласование РЛС с гирокомпасом. Для этого переключатель 'курс–север–согласование' поставить в положение 'согласование'. С помощью ЭВН выставить на цифровом табло значение истинного курса по данным репитера гирокомпаса.
–проверить смещение центра развертки. Для этого перейти на одну из шкал дальности в пределах 8 миль. Нажать клавишу 'смещение центра' и рукоятками 'смещение центра по X' и 'смещение центра по Y' проверить перемещение центра в любую сторону до 2/3 радиуса экрана ЭЛТ.
сли переключатель 'отключено–готовность–работа' был установлен в положение 'работа', минуя положение 'готовность', то через 4 мин с момента подачи питания автоматически включится передатчик, о чем сигнализирует сигнальная лампа 'высокое вкл.'. На экране появятся изображения объектов в зоне обзора станции.
–отрегулировать изображение рукоятками 'усиление', 'волны' и 'дождь'.
–если схема АПЧ имеет недостаточную настройку, то нужно включить РПЧ и по изображению на экране произвести подстройку частоты гетеродина.
–при необходимости отключить СВЧ излучение преключатель 'отключено–готовность–работа' перевести в положение 'готовность'.
–выключение станции производится переводом переключателя 'отключено–готовность–работа' в положение 'отключено' и выключением напряжения бортовой сети.
РЛС DECCA
Дата добавления: 2020-04-25; просмотров: 138; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!