Выбор структуры проектируемого манипулятора
На основании анализа выбираем структурную схему проектируемого манипулятора промышленного робота (рис.5)
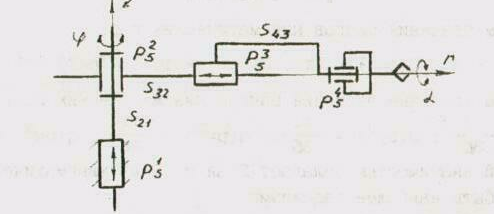
Рис. 3 Структурная схема проектируемого манипулятора
Аналогично предыдущему расчету определяются:
1) Число степеней свободы W = 3
2) Порядок структуры P={p51 s21 p52 s32 p53}
3) Тип кинематической цепи F = 0
4) Сложность структуры x(р) = 3
5) Структурная значимость кинематических пар:
- значения рангов кинематических пар
G(р51) = 7; G(р52) = 10; G(р53) = 7;
- удельные значения рангов кинематических пар
q(р51) = 7/24; q(р52) = 10/24; q(р53) = 7/24.
Кинематическая схема проектируемого манипулятора представлена на рис. 4.
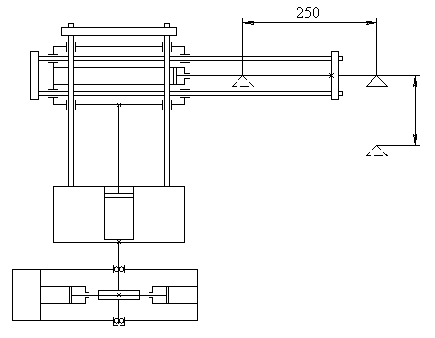
Рис.4. Кинематическая схема манипулятора
ПРЕДВАРИТЕЛЬНЫЙ РАСЧЁТ ЗВЕНЬЕВ МАНИПУЛЯТОРА НА ЖЁСТКОСТЬ
Определение величины деформации
Выбираем Г-образную расчетную схему манипулятора, с сосредоточенной силой от веса детали и захвата. К горизонтальной балке приложена распределенная нагрузка от ее веса.

Рис.5. Расчетная схема Рис.6. Схема деформаций
Определим величину деформации конструкции только в вертикальном направлении, т.к. деформации в горизонтальном направлении очень мала и может не учитываться в предварительном расчете.
Величину деформации определим по теореме Костельяна путем дифференцирования потенциальной энергии.
|
|
|

где f - величина деформации;
U - потенциальная энергия;
P - сила действующая в направлении деформации.
Для данной схемы (Рис.2) величина вертикальной деформации определится по формуле:

где Е – модуль упругости материала;
J г , J в – соответственно моменты инерции сечений горизонтального и вертикального звеньев;
М i – изгибающие моменты в сечениях xi .
Получим выражения моментов и продифференцируем их по Р:


Подставим полученные значения в формулу вертикальной деформации:



Выбор геометрических характеристик сечений
По заданной величине деформации в вертикальном направлении рассчитаем величину момента инерции поперечного сечения руки. Для расчета запишем необходимые величины:
l = 0,33 м; а = 0,25 м; h = 0,23 м.
Распределенная нагрузка определится, как:

а горизонтальный момент инерции руки:
где dP – диаметр руки, r - плотность стали, r = 7800 кг/м3.
Модуль упругости стали: Е = 2,1×1011 Па.
Величина деформации: fB = 1×10-4 м.
Сила: Р = Рсх + Ргр ,
где Рсх – вес схвата, Рсх = 6 Н (на основании формулы
mсх = m × kc × kп ,
где m – полезная масса;
kc – коэффициент, учитывающий массу груза;
|
|
|
kп – коэффициент, учитывающий тип привода.)
Р = 6 + 5 = 11 Н.
Запишем формулу вертикальной деформации в следующем виде, учитывая, что IB = 3×IГ :

Введем обозначения:

Вычислим величины A и B при заданных параметрах, и, подставив все значения в формулу вертикальной деформации, получим биквадратное уравнение относительно диаметра руки:




Решая полученное уравнение, получим величины для расчетной схемы:
dP = 32,5 мм.
Из зависимости IB = 3×I Г определим момент инерции сечения вертикальной стойки и получим ее диаметр для расчетной схемы:
d В = 42,8 мм.
Т.к. для модуля выдвижения руки принимаем конструкцию с двумя направляющими, причем расстояние между ними 80 мм, рассчитаем диаметр одной направляющей (расчет будем вести из условия равенства моментов инерции сечений одной руки и конструкции с двумя направляющими):
 ,
,
где J Г.Н. – момент инерции поперечного сечения одной направляющей;
S – площадь поперечного сечения одной направляющей;
b – расстояние между центрами сечений руки и направляющей,
| b |
| b |
| dГ.Н. |
| dГ.Н. |
| dР |
| Рис. 9 – схема замещения руки горизонтальными направляющими |
С учетом того, что:
|
|
|
 = 0,785×d 2 Г.Н. ;
= 0,785×d 2 Г.Н. ;
 = 0,049× d 4 Г.Н.;
= 0,049× d 4 Г.Н.;
решая биквадратное уравнение относительно d Г.Н., получим:
d Г.Н. = 2,2 мм.
Т.к. для подъема каретки выбираем двухсстоечную конструкцию, аналогичным способом определим диаметр одной вертикальной стойки:
 ,
,
где J В.Ст. – момент инерции поперечного сечения вертикальной стойки;
S – площадь поперечного сечения одной вертикальной стойки;
b – расстояние между центрами сечений расчетной и истинной вертикальной стойки, b = 40 мм.
Решив аналогичное биквадратное уравнение, получим:
d В.Ст. = 6,6 мм.
Из конструкторских соображений окончательно принимаем:
d Г.Н. = 0,008 м.
d В.Ст. = 0,020 м.
Дата добавления: 2020-04-25; просмотров: 218; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!