Приведем ряд силовых схем тиристорных электроприводов.
Силовая схема электропривода постоянного тока
Вентильные преобразователи напряжения постоянного тока
В настоящее время вентильные преобразователи напряжения находят весьма широкое применение в системах АЭП постоянного тока. Широкое использование вентильных преобразователей обусловлено успешным развитием полупроводниковой техники, а именно освоением промышленностью надежных, малогабаритных управляемых силовых вентилей — тиристоров и транзисторов.
В большинстве современных преобразователей для привода в качестве силовых вентилей используются тиристоры. На их основе для электропривода постоянного тока построены два типа преобразователей: тиристорные преобразователи ь(ТП) напряжения переменного тока в постоянный (управляемые выпрямители) и широтно-импульсные преобразователи (ШИП) неизменного напряжения постоянного тока в регулируемое напряжение постоянного тока.
Тиристорные преобразователи обладают рядом достоинств:
1) высокий КПД, обусловленный незначительным падением напряжения на тиристоре (менее 1 В);
2) незначительная инерционность, обусловленная фильтрами в цепях управления и неуправляемостью тиристоров в течение интервала проводимости (10—20 мс);
3) высокая надежность при использовании быстродействующей защиты и модульно-блочном исполнении ТП.
К недостаткам ТП следует отнести:
|
|
|
1) низкий коэффициент мощности при глубоком регулировании напряжения;
2) искажения питающего напряжения, вносимые работой ТП;
3) повышенный уровень излучаемых радиопомех.*!
Функциональная схема ТП представлена на рис. 3.1.
Входной координатой ТП является напряжение управления U y , выходной координатой — выпрямленная ЭДС, определяемая как средняя на интервале проводимости величина в установившемся режиме Е& и в переходных процессах e& . Входной блок Б1 преобразует величину U y
в угол открывания тиристоров а, а выходной блок Б2 преобразует величину а в ЭДС ТП. Технически блок Б1 представляет собой систему импульсно-фазового управления (СИФУ), а блок Б2 — вентильную группу ВГ.
Конструктивно вентильная группа представляет собой комплект тиристоров, предназначенных для определенного направления тока нагрузки, например комплекты «Вперед» и «Назад» в реверсивных ТП.
На выходную координату ТП оказывает влияние возмущающее воздействие — ток нагрузки Id , который через функциональный блок нагрузки БН поступает на вход Б2. Влияние Id на Ed проявляется только в режиме прерывистых токов.

Рис. 3.1. Блочная структурная схема ТП
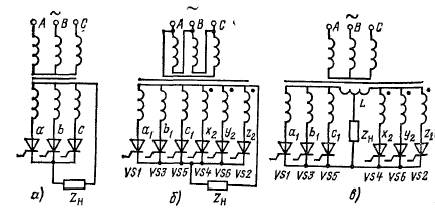
Рис. 3.2. Трехфазная (а), шестифазная (б) и трехфазная с уравнительным реактором, (в) нулевые схемы управляемых выпрямителей
|
|
|
Из приведенных на рис. 3.2 схем наиболее простой является трехфазная нулевая схема, имеющая меньшее число вентилей и обычный двухобмоточный трансформатор. Однако эта схема имеет наибольший уровень пульсаций в выпрямленной ЭДС (частота пульсаций составляет 3fc =150 Гц). В этой схеме выпрямленный ток нагрузки, протекая через трансформатор, вызывает его дополнительное подмагничивание. В связи с этим трансформатор должен выбираться с некоторым запасом по сечению магнитопровода. Завышенные габариты трансформатора относительно полезной нагрузки обусловливают целесообразность применения этой схемы для электропривода относительно небольшой мощности (1—10 кВт).
В схеме с уравнительным реактором (рис. 3. 2, а) вентильные группы VS1, VS3, VS5 и VS4, VS6, VS2 работают параллельно.
Уравнительный реактор L исключает коммутацию вентилей с одной группы (VS1, VS3, VS5) на вентили другой группы (VS2, VS4,'VS6), тем самым делает работу группы независимой. Схема исключает подмагничивание трансформатора током нагрузки, так как направления МДС двух обмоток на одном стержне трансформатора противоположны. По пульсациям в выпрямленной ЭДС данную схему можно рассматривать как условно-шестифазную (частота пульсаций составляет 6fc = 300 Гц). Наименьшая типовая мощность трансформатора и наибольший ток нагрузки относительно токов вентиля и трансформатора делают эту схему целесообразной для ТП большой мощности с большими токами нагрузки. Недостатком схемы является наличие дополнительного элемента — уравнительного реактора.
|
|
|
Для шестифазной схемы (рис. 3.2,6) с частотой ЭДС 6fc =300 Гц не требуется уравнительного реактора, однако в этой схеме необходима наибольшая типовая мощность трансформатора. Схема практически работоспособна только при соединении первичной обмотки трансформатора в треугольник. При соединении звезда — шестифазная звезда возникает сильное однофазное подмагничивание всех трех стержней трансформатора, что делает данную схему практически непригодной для работы ТП.
Широкое применение в электроприводе находит трехфазная мостовая схема ТП (рис. 3.3). Эта схема представляет собой сдвоенную нулевую схему, работающую последовательно в оба полупериода переменного тока.

Рис. 3.3. Трехфазная мостовая схема выпрямителя
|
|
|
По сравнению с трехфазной нулевой схемой мостовая схема имеет преимущества:
1) выпрямленная ЭДС при одном и том же вторичном напряжении трансформатора в 2 раза больше;
2) пульсации выпрямленной ЭДС (частота пульсаций равна бfc=300 Гц) в 2 раза больше по частоте и меньшепо амплитуде;
3) вентильные группы могут подключаться к сети без трансформатора;
4) типовая мощность трансформатора меньше:

Перечисленные достоинства обусловливают преимущественное применение трехфазной мостовой схемы в системах электропривода мощностью в десятки — сотни киловатт. Эта схема, выполненная в виде единичного блока — модуля, позволяет унифицировать ТП. Для нагрузок с большим током ТП комплектуется из нескольких мостов, соединенных параллельно по целям переменного и постоянного тока. Представленные на рис. 3,2 и 3,3 схемы относятся к нереверсивным ТП. Реверсивные ТП комплектуются из двух нереверсивных вентильных комплектов, объединенных электрически по цепи нагрузки и по цепям СИФУ.
Для удобства анализа работы СИФУ многофазных ТП нумерацию тиристоров в вентильных группах выполняют в соответствии с очередностью их открывания, на чиная отсчет от фазы а (рис. 3.2, 3.3).
Соответствующие диаграммы очередности открывания тиристоров изображены для шестифазной схемы на рис. 3.4, а для трехфазной нулевой с уравнительным реактором и трехфазной мостовой на рис. 3.4,6. Векторная диаграмма вторичных ЭДС трансформатора показана на рис. 3.4, в. Основу СИФУ составляет блок управления, предназначенный обычно для управления одним тиристором. В состав блока управления входят генератор опорных напряжений ГОН, синхронизированных с напряжением питания тиристоров, фазосмещающее
устройство ФСУ, регулирующее фазу открывающего импульса, и генератор импульсов ГИ, вырабатывающий необходимый для открывания тиристоров импульс (рис. 3.5, а).

Рис. 3.4. Диаграммы очередности открывания тиристоров в шестифазной (а), трехфазной нулевой с уравнительным реактором и трехфазной мостовой (б) схемах выпрямителя и векторная диаграмма вторичных ЭДС трансформатора (с)
,

Рис. 3.5. Функциональная схема блока управления СИФУ (а) и диаграмма регулирования фазы открывающего импульса по вертикальному принципу (6)
Приведем ряд силовых схем тиристорных электроприводов.
Фазовое управление ( вертикальный способ управления). Питание двигателей постоянного тока осуществляется от тиристорных преобразователей, например, в электроприводе ЭТ-3Р (см.силовую схему рис.10.17). Вертикальный способ управления заключается в том, что изменение фазы управляющего импульса обеспечивается изменением управляющего напряжения относительно некоторого опорного напряжения и генерации управляющего импульса при равенстве управляющего и опорного напряжений. Для вертикального способа фазосмещения наиболее широко используются два вида опорных напряжений: линейно изменяющееся во времени и синусоидальное.На рис.10.19 показано формирование выходного напряжения преобразователя при линейно изменяющемся опорном напряжении.

Рис.10.17.Встречно-параллельная схема с нулевым выводом
Системы импульсно-фазового управления (СИФУ) делятся на две основных группы: синхронные СИФУ и асинхронные.В тиристорных электроприводах наиболее распространены синхронные СИФУ, имеющие блок синхронизации.Синхронизация с питающей сетью заключается в том, что управляющие импульсы для каждого тиристора преобразователя генерируются в диапазоне, жестко связанном с периодичностью повторения анодного напряжения и использующие момент перехода фазных напряжений на положительную полуволну.При этом синхронизирующий импульс задерживается на угол b (для трехфазных систем b = 30°). Упрощенная функциональная схема системы вертикального управления представлена на рис.10.18.

Рис.10.18
Элементы этой схемы:
СУ - синхронизирующее устройство;
ГПН - генератор пилообразного напряжения;
СС - схема сравнения;
ФИ - формирователь импульсов управления тиристорами;
РИ - распределитель импульсов управления тиристорами;
ТП - тиристорный преобразователь.
Диаграмма напряжений и токов в силовой цепи и элементах схемы управления представлена на рис. 10.19.

Рис.10.19
На синхронизирующее устройство подаются напряжения трех фаз. В моменты времени, соответствующие точкам, в которых положительные фазные напряжения равны (см.рис.10.19), синхронизирующее устройство вырабатывает синхронизирующие импульсы, запускающие ГПН. Напряжение ГПН подается на сравнивающее устройство, где оно сравнивается с напряжением управления. В моменты равенства Uгпн = Uу устройство сравнения выдает управляющие импульсы на блок формирования управляющих напряжений для тиристорного преобразователя.Временная разница между импульсами блоков СС и СУ определяет угол управления a. Диаграммы напряжения на выходе преобразователя, тока якоря и частоты вращения при a = 30° эл. представлены на рис.10.19.
Частота вращения якоря
W = Uяmax cosa / Yad - rя Mcт / Yad 2 (10.46)
Механические характеристики электродвигателя постоянного тока при питании якоря от одной группы тиристорного преобразователя представлены на рис.10.20.

Рис.10.20
Отличительной особенностью этих характеристик является наличие зоны нелинейности при малых Mcт в области прерывистых токов.Явление прерывистого тока вызвано тем, что с уменьшением тока якоря при снижении момента нагрузки уменьшается запас электромагнитной энергии в индуктивных элементах якорной цепи и это приводит к тому, что величины ЭДС самоиндукции оказывается недостаточно для поддержания тока якоря при отрицательных напряжениях на анодах тиристоров.При этом на якоре будет действовать не среднее напряжение, как при протекании тока якоря, а только положительная полуволна, что приводит к увеличению выпрямленного напряжения. В режиме прерывистых токов наблюдается появление бросков тока.Кроме того, бестоковая пауза вносит отклонение в работу системы регулирования: во время бестокового отрезка времени сигнал обратной связи по току отсутствует и происходит накопление сигнала задания тока интегратором регулятора тока (регуляторы тока, как правило, выполняют ПИ- типа). Все это приводит к возрастанию пульсаций частоты вращения электродвигателя в режимах близких к холостому ходу.Для исключения перерегулирования, вызванного бестоковой паузой, необходимо принятие специальных мер,одной из которых может служить отключение входа интегратора регулятора тока на время паузы.
Описанное явление отсутствует при совместном симметричном управлении тиристорными блоками реверсивного преобразователя. Напряжение выпрямительной группы тиристоров U1 =
Ud0 cosa1 , а напряжение инверторной группы U2 = Ud0 cosa2 . Если фазы управляющих импульсов тиристорного преобразователя удовлетворяют условию a1 + a2 = p и процессы в обеих тиристорных блоках происходят одновременно, средние значения напряжений работающих фаз равны между собой и по отношению к двигателю U1 = - U2. Однако мгновенные значения напряжений параллельно включаемых фаз не равны, поэтому появляются уравнительные токи, замыкающиеся как через якорь, так и минуя якорь двигателя.Для ограничения уравнительных токов на выходе тиристорного преобразователя включены уравнительные реакторы, однако они снижают быстродействие системы.
Приведем ряд силовых схем тиристорных электроприводов, рис. 10.21 - 10.23.

Рис.10.21. Силовая схема тиристорного электропривода ЭТ-6
Выходное напряжение преобразователя этого электропривода, в отличие от ЭТ-3Р, имеет пониженные пульсации, время квантования в два раза меньше .
Мостовая схема встречно-параллельного включения представлена на рис.10.22.

Рис.10.22. Силовая схема тиристорного электропривода ЭТУ- 3601
Мостовая перекрестная схема преобразователя представлена на рис. 10.23.Дроссели L1 , L2 могут быть выполнены насыщающимися.Перекрестная схема уступает встречно-параллельной по техническим и весовым показателям, так как она имеет трехобмоточный трансформатор, имеющий больший вес и стоимость, чем двухобмоточные трансформаторы других схем.

Рис.10.23
Тиристорный преобразователь с реверсором может иметь вид, показанный на рис.10.24.
Рис.10.24. Силовая схема тиристорного электропривода 5У-3608
Силовая часть схемы образована трехфазным двухполупериодным управляемым выпрямителем. Реверс осуществляется с помощью тиристорного моста - реверсора. Пусть в исходном состоянии открыты тиристоры Т1 и Т3. Для осуществления рекуперативного торможения управляемый выпрямитель переводится в режим зависимого инвертора и, как только проводившие ток вентили закроются,открывается вторая пара тиристоров Т2 -Т4, обеспечивая перекачку запаса энергии электрической машины в питающую сеть. После торможения электродвигателя до остановки управляемый выпрямитель переводится вновь в выпрямительный режим и двигатель разгоняется в обратном направлении.
Импульсное управление. Сущность импульсного управления состоит в том, что регулирование частоты вращения электродвигателя не за счет изменения величины напряжения управления, а за счет изменения времени, в течение которого подводится это напряжение.При импульсном управлении работа двигателя состоит из чередующихся периодов разгона и торможения, то есть частота вращения двигателя непрерывно колеблется относительно некоторого среднего значения. С увеличением относительной продолжительности включенного состояния среднее значение частоты вращения растет.Амплитуда колебаний частоты вращения тем меньше, чем больше отношение электромеханической постоянной времени к периоду следования импульсов.Основными схемами импульсного управления являются схемы с тиристорными или транзисторными преобразователями.Для быстродействующих электроприводов с широким диапазоном регулирования , высокой точностью и хорошими энергетическими показателями важно, чтобы преобразователь обладал малой инерционностью, двусторонней проводимостью и малым сопротивлением выходного каскада. Этим требованиям отвечают транзисторные преобразователи с широтно-импульсной модуляцией выходного напряжения.
Пусть питание двигателя постоянного тока осуществляется от транзисторного преобразователя как, например, в электроприводе ЭШИМ-1 или ПРП1, рис.10.25.

Рис.10.25
В этой схеме: НВ - неуправляемый выпрямитель, Сф -конденсатор фильтра, К- компаратор.
Возможна частичная рекуперация энергии от двигателя в конденсатор.При возрастании напряжения на конденсаторе выше нормы компаратор, сравнивая напряжение конденсатора с эталонным, открывает транзистор VT- 5 и происходит частичный разряд конденсатора на сопротивление Rт.
Упрощенная функциональная схема системы импульсного управления представлена на рис.10.26.

Рис.10.26
Элементы этой схемы:
ГТЧ - генератор тактовой частоты;
ГПН - генератор пилообразного напряжения;
СС - схема сравнения;
ФИ1,ФИ2 - формирователи управляющих сигналов;
Т - триггер.
Напряжение Uук - напряжение управления ключами преобразователя.
Диаграмма напряжений и токов в силовой цепи и элементах схемы управления представлена на рис. 10.27.

Рис.10.27
Задающим элементом системы управления является генератор тактовой частоты.Он определяет длительность цикла. Обычно тактовая частота выбирается в пределах 1-2 кГц. Импульсы ГТЧ запускают генератор пилообразных напряжений и первый формирователь импульсов, который активизирует триггер.Триггер направляет управляющие сигналы на открытие транзисторных ключей. На якорь двигателя подается напряжение источника питания.
Напряжение ГПН подается на сравнивающее устройство, где оно сопоставляется с управляющим напряжением. В моменты равенства Uгпн = Uу устройство сравнения выдает управляющие импульсы на второй формирователь импульсов управления, который опрокидывает триггер и транзисторные ключи закрываются. Временная разница между импульсами ГТЧ и блока СС определяет время включения (управления) двигателя в цикле.Коэффициент скважности g=tу/tц. Диаграммы напряжения на выходе преобразователя, тока якоря и частоты вращения при g= 0,75 представлены на рис.10.27.
Широтно-импульсные преобразователи на транзисторах имеют симметричное или несимметричное управление.Диаграммы рис.10.26 отображают процессы при несимметричном управлении. Частота вращения якоря
W = g Uяmax / Yad - rя Mcт / Yad 2 (10.47)
Механические характеристики электродвигателя постоянного тока при питании якоря от транзисторного преобразователя, работающего в несимметричном режиме, представлены на рис.10.28.Наибольшая протяженность режима прерывистых токов имеет место при g = 0,5. При
g = 0 и g = 1 возможен только режим непрерывного тока.При высокой частоте ШИМ (f ³ 10 кГц) зона нелинейности практически отсутствует.
 Рис.10.28
Рис.10.28
Отличительной особенностью этих характеристик является наличие зоны нелинейности при малых Mcт в области прерывистых токов. Режим прерывистых токов возможен тогда, когда постоянная времени электромагнитных переходных процессов меньше периода квантования tц, и характеризуется тем, что во время паузы ток якоря равен нулю.Очевидно, что закон регулирования частоты вращения элетродвигателя в режиме непрерывного тока получается линейным.Граница перехода из одного режима в другой на рис.10.28 показана штриховой линией.
Этого недостатка можно избежать при симметричном управлении транзисторным преобразователем. Механические характеристики двигателя при этом не имеют нелинейной зоны.Однако электрические и дополнительные потери возрастают и снижают КПД системы. Симметричный способ управления используется в маломощных электроприводах.
Другой способ предотвращения появления прерывистых токов и сокращения зоны нелинейности заключается в введении в цепь якоря индуктивных реакторов, рис.10.29.

Рис.10.29
При несимметричном режиме в период пауз напряжения питания электромагнитная энергия, накопленная в реакторах L1, L2 , наряду с электромагнитной энергией, сосредоточенной в индуктивности обмотки якоря, поддерживает протекание тока якоря в прежнем направлении. Выбором величины индуктивности реакторов можно свести зону нелинейности практически до нуля.
Дата добавления: 2019-09-13; просмотров: 1372; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!