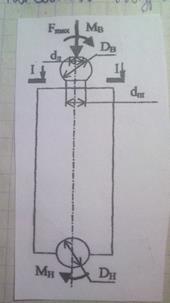
Прочностной расчёт опор телескопического гидроподьёмника.
При расчёте верхней опоры, её шейку проверяют на изгиб и сжатие. Изгибающий момент в сечении 1-1 изза трения в верхней (Мв) и нижней (Мн) опорах записывается:
Mп=Мв+Мн=FmaxfDв/2+FmaxfDн=Fmaxf(Dв+Dн).
f-коэфициент трения
Dв и Dн – диаметры верхней и нижней шаровых опор.
Наибольшие напряжения изгиба в сечении 1-1 будет определяться:
σсм=Mсч/Nп1
Mсч-момент сопротивления сечения изгиба.
Напряжение сжатия в сечении 1-1 будет
σсж=Fmax/Sс
Sс – площадь сечения.
Суммарная напряжения в сечении 1-1 от действия изгиба и сжатия можно заменить:
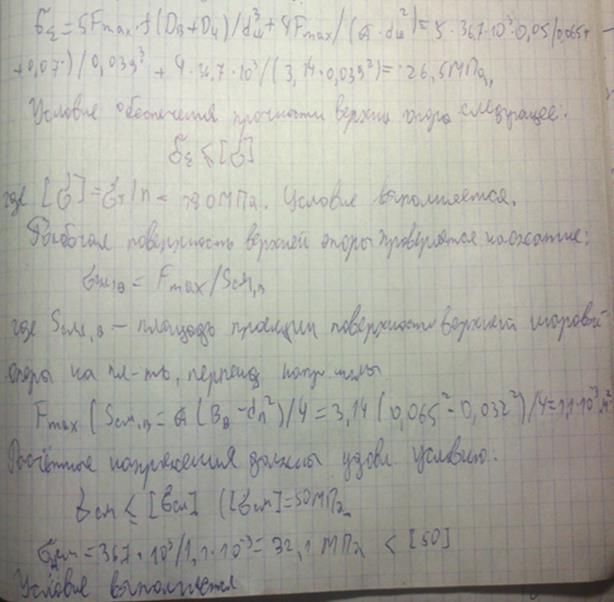
Нижняя опора гидроцилиндра проверяется на сжатие рабочей поверхности по формуле: σсм=Fmax/Sсм.
Где Sсм – площадь проекции поверхности нижней шаровой опоры на плоскость, перпендикулярную направлению силы Fmax. Напряжение смятия не должно быть больше допустимого.
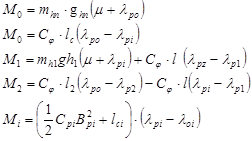
Устойчивость самосвальных АП: особенности, расчётная схема и управления.
При расчете поперечной устойчивости определяется 2 показателя:
1. коэф. поперечной устойчивости η0
2. угол крена подрессоренных масс λ
Расчетные схемы автомобиля
Схема 1:

Схема 2:
 ?
?
Схема 3:

Схема 4:


Кроме общего подхода выполняется оценка поперечной устойчивости при разгрузке:
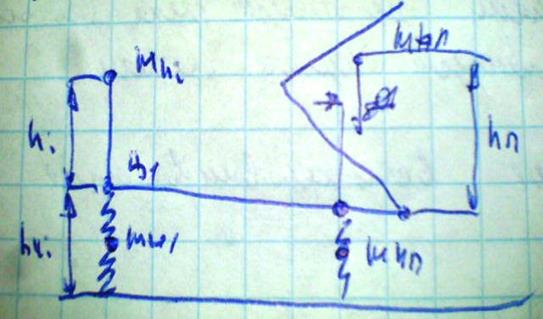
Угол поперечной устойчивости самосвала должен быть не менее 80 и коэф. не менее 0,15.
Кинематика криволинейного движения автопоезда при повороте на 90 и 180 градусов: расчётная схема и формулы.
|
|
|
Поворот на 90 градусов



X, Yo,  – берутся в точке 1.
– берутся в точке 1.

Если нет кругового участка, то 
Проекции основной координаты на оси координат:

ОП: если 0<  <180 и
<180 и  , то ОП=
, то ОП=  )
)
Если  =0, то ОП=
=0, то ОП= 
Yп=ОП  sin
sin 
Поворот на 180 градусов
ОП=Xc+Romin;
Xп=Xc+Romin.
33. Кинематика криволинейного движения автопоезда на переставке: расчётная схема и формулы.

При переставке:
А) для кругового участка на входе:
Если нет кругового участка, то
Проекции основной координаты на оси координат:
ОП: если 0< <180 и , то ОП= )
Если =0, то ОП=
Yп=ОП sin
Б) для кругового участка на выходе:
Xc вых= Lпер – (Хо – Romin*sin  )
)
Yc вых = Yп – (Yo + Romin*cos )
Lпер = 2* ОП*(1+cos  ) – длина переставки
) – длина переставки
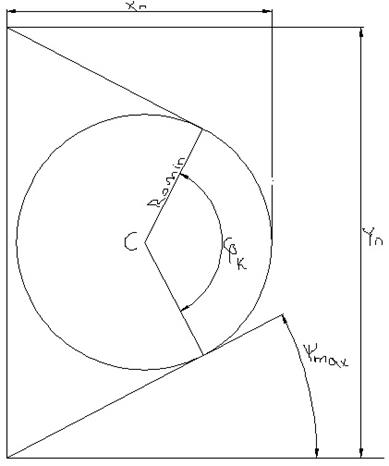
34. Кинематика кругового движения автопоезда на переставке: расчётная схема и формулы для габаритных и произвольных точек.

1 случай: ось ПП проходит через основание перпендикуляра из центра поворота на продольную ось ПП. Полуприцеп будет вписываться в габаритную ширину.

Ck1=Ro - 
Bг= 
Где  – радиус поворота основной точки
– радиус поворота основной точки
 – габаритная ширина тягача;
– габаритная ширина тягача;
 – база тягача;
– база тягача;
 - передний свес тягача;
- передний свес тягача;
 – габаритная ширина самого широкого прицепного звена.
– габаритная ширина самого широкого прицепного звена.
2 случай: ось ПП расположена так, что  меньше чем радиуса
меньше чем радиуса  ( <
( <  ).
).
|
|
|
CkII = - 

При управляемых колесах полуприцепа

Если задний свес(С2) слишком велик, то

Если  >
>  , то
, то 
3 случай: задняя ось ПП расположена так, что  (частный вариант второго случая).
(частный вариант второго случая).
4 случай: задняя ось ПП расположена так, что  Это возможно при большой базе и большом свесе ПП. При проектировании этот случай стремятся исключить.
Это возможно при большой базе и большом свесе ПП. При проектировании этот случай стремятся исключить.
Радиус любой точки на круговой траектории:


Дата добавления: 2019-07-17; просмотров: 467; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!