Кинематическая схема привода пластинчатого конвейера

1 – электродвигатель; 2 – муфта; 3 – редуктор; 4 – цепная передача; 5 – тяговые звездочки; I – вал быстроходный; II, III – валы промежуточные; IV – вал быстроходный; V – вал приводной
2.3Изобразите схему сил, действующих на ходовую часть конвейера, приведите последовательность тягового расчета с указанием основных расчетных зависимостей.
Силы, действующие на тяговый элемент конвейера.
При пуске конвейера тяговому элементу приходится преодолевать кратковременно действующие динамические нагрузки необходимые для преодоления инерции движущихся масс и сопротивлений при трогании с места ходовой части конвейера. Эти нагрузки тем больше, чем тяжелее, подвижные части конвейера, выше скорость их движения и меньше время пуска.
Кроме кратковременно действующих динамических нагрузок, в цепных конвейерах имеют место постоянно действующие динамические нагрузки вследствие периодического изменения скорости цепи на трассе конвейера и необходимого из-за того преодоления сил инерции подвижных масс.
Динамические нагрузки не только увеличивают общую действующего на тяговый элемент продольную силу, но и вследствие многократности действия вызывают в цепях усталостные явления. Определив динамические силы, можно более точно рассчитать размеры тяговых цепей (по сравнению с расчетом по статистическому усилию, определяемому методом «обхода по контуру»).
|
|
|
Помимо продольных динамических сил, вызванных неравномерностью движения, в точке набегания на цепь действуют динамические силы, направленные под углом к оси конвейера и обусловленные тем, что каждый новый зуб входит в зацепление с шарниром цепи с ударом. При большой скорости цепи эти удары могут служить причиной разрушения шарниров, а также возникновения в цепи поперечных колебаний. (При расчетах последние не учитываются, т.к. действуют на небольшой участок цепи с незначительной массой конвейера). Учитываются только продольные колебания.
Рассмотрим схему набегания цепи на звездочку или блок с гранями.

2.4Изобразите эскиз одного из узлов конвейера, обозначив на чертеже необходимые размеры и посадки.

2.5 Изобразите рабочий эскиз одной из деталей рассмотренного узла, обозначив на чертеже необходимые размеры и допуски. Объясните назначение детали.

3. Эскалатор — подъёмно-транспортная машина в виде наклонённой на 30—35° к горизонту лестницы с движущимися ступенями для перемещения людей с одного уровня на другой. Эскалаторы можно условно разделить на 2 группы:
1. Тоннельные - предназначены для установки в тоннелях (галереях) метрополитена (имеют значительную высоту подъема пассажиров, высокую скорость движения лестничного полотна, большую провозную способность).
|
|
|
2. Поэтажные - для установки между этажами зданий и сооружений (имеют минимальные габариты, малошумные, с эффектной внешней отделкой, гармонирующей с интерьером зданий, в которых они установлены. Недостатком является подъем пассажиров на небольшую высоту( до 25 метров)).
Изобразите схему ОКЦ эскалатора, обозначив позициями основные составные части и механизмы. Объясните принцип действия и устройство машины, характер выполняемых технологических операций.

Рис. 1-1. Общая схема конструкции эскалатора1. Ферма 2. Балюстрада 3. Тяговый механизм 4. Ступеньки 5. Устройство натяжения ленты перил 6. Трансмиссия 7. Привод
Устройство эскалатора, составные части:
Главный привод
Главный привод эскалатора ЭТ-2 предназначен для передвижения лестничного полотна с эксплуатационной скоростью 0,75 м/с. Привод ЭТ-2 (ЭТ-2М) состоит из главного электродвигателя, муфты с рабочими тормозами, быстроходного редуктора, главного вала эскалатора вместе с тяговыми звёздочками и аварийным тормозом.
Вспомогательный привод эскалатора предназначен для передвижения лестничного полотна с ремонтной скоростью 0,04 м/с при монтажных и демонтажных работах, а так же при растормаживании аварийного тормаза.
|
|
|
Тормозная система
Тормозная система состоит из рабочего и аварийного тормоза. Рабочий тормоз нормально-замкнутого действия установлен на входном валу редуктора и действует при каждом отключении главного и вспомогательного привода, а также при обесточивании цепи управления.
Эскалатор ЭТ2 оборудован автоматически действующим аварийным тормозом, расположенным на главном приводном валу. Аварийный тормоз должен остановить эскалатор, работающий на спуск, в случае увеличения скорости лестничного полотна на 30% и более от номинальной скорости, а также при самопроизвольном изменении направления движения лестничного полотна, работающего на подъем эскалатора и при отказе рабочего тормоза.
Лестничное полотно
Лестничное полотно состоит из большого количества ступеней, представляющих собой тележки на четырех колёсах, движущихся по направляющим путям (трассе). С обоих сторон ступени соединены между собой цепями. Ступени крепятся к цепям полым шарниром цепи, надетым на цапфу оси ступени. Таком образом, ступень шарнирно связана с цепью, может вращаться на оси и, следовательно, принимать любое положение на оси относительно цепи в вертикальной плоскости в зависимости от конфигурации трассы направляющих путей. Шарнирное крепление ступеней позволяет лестничному полотну образовать на входе и выходе с эскалатора горизонтальные площадки, удобные для пассажира.
|
|
|
Для безопасности входа на эскалатор и выхода с него горизонтальная поверхность ступеней имеет настил с выступающими гребнями, расположенными на равном расстоянии одна от другой. Поступёнок имеет вертикальные выступы и впадины, которые в сочетании с выступами и впадинами настила образуют лабиринт. НА входе и выходе с эскалатора предусмотрены неподвижные наклонные площадки с зубцами, которые попадают в промежутки между гребнями настила ступеней. Такое устройство обеспечивает безопасный переход пассажира с эскалатора в вестибюль.
Балюстрада
Рабочая ветвь лестничного полотна и поручней отделена от механизмов и металлоконструкций эскалатора прочной жёсткой гладкой и трудно сгораемой облицовкой - балюстрадой. Конструкция балюстрады легко разборная в местах, требующих технического обслуживания. Перепады плоскостей между элементами балюстрады со стороны лестничного полотна более 3 мм не допускается. Стыки фартуков не должны иметь перепадов более 0,5 мм и должно быть исключено их взаимное смещение.
Поручневое устройство
По обеим сторонам эскалатора на балюстраде устроен движущийся поручень. Скорость движения поручня не должна отличаться от скорости движения ступеней более чем на 2%.
Поручень представляет собой С - образный профиль.
Блокировочное устройство
Эскалатор оборудован блокировочными устройствами, отключающими электродвигатели с остановкой лестничного полотна при:
- обрыве, чрезмерной вытяжке или остановке поручня,
- перемещении одной или двух звездочек каретки натяжной станции в сторону привода или в обратную сторону более 30 мм.,
- отвинчивании гайки или выходе винта аварийного тормоза.
- срабатывании рабочего или аварийного тормозов,
- запасе хода якоря электромагнита рабочего тормоза менее регламентированного,
- подъеме входной площадки,
- воздействия на устройство «стоп» в любом месте прохода между эскалаторами или за щитами балюстрады, а также на выключателе «стоп»,
- подъеме или опускании ступеней перед входными площадками,
- сходе поручня с направляющих на нижнем криволинейном участке,
- отключении электропитания работающего эскалатора рубильником,
- обрыве или чрезмерной вытяжки приводной цепи.
Аппараты управления
Для осуществления пуска главного и вспомогательного привода служат аппараты управления эскалатором.
Для необходимой плавности системы управления эскалатора обеспечивают ускорение: - в начальный момент пуска - 0,68 м/с2, - в процессе разгона - 0,75 м/с2.
Для пуска под нагрузкой и остановки эскалатора у верхней и нижней входных площадок установлен пульт управления.
Эскалаторы могут быть оборудованы пультами дистанционного управления, находящимися как в зоне расположения эскалатора, так и вне её.
Для управления вспомогательным приводом эскалатора предусмотрены стационарные пульты управления, установленные вблизи главного вала, а также переносные пульты управления и штепсельные розетки для их подключения и стационарные кнопки пуска на подъем и на спуск, установленные на металлоконструкции у аварийного тормоза. 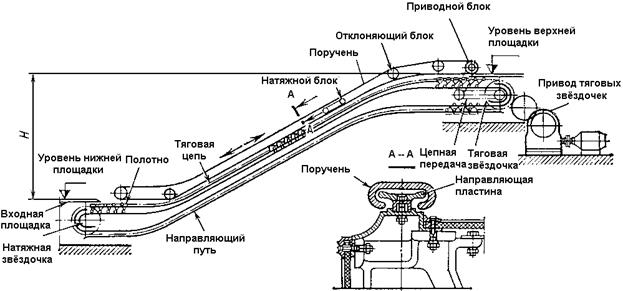
Изобразите полную кинематическую схему приводной станции и ходовой части эскалатора, указав позиции основных составных частей. Объясните назначение и устройство ходовой части, принцип ее действия и характерные особенности.
Система механической передачи. Ступеньки и ленты поручней приводятся в действие при помощи системы механической передачи.  Рис. 1-3 Система механической передачи 1. Приводная цепь 2. Главный вал 3. Двойное приводное колесо 4. Ведущее зубчатое колесо 5. Цепное колесо вала системы перил 6. Перила 7. Ступеньки 8. Цепь ступенек 9. Вал системы перил 10. Фрикционное колесо 11. Приводная цепь системы перил 12. Приводной механизм 13. Зубчатое колесо
Рис. 1-3 Система механической передачи 1. Приводная цепь 2. Главный вал 3. Двойное приводное колесо 4. Ведущее зубчатое колесо 5. Цепное колесо вала системы перил 6. Перила 7. Ступеньки 8. Цепь ступенек 9. Вал системы перил 10. Фрикционное колесо 11. Приводная цепь системы перил 12. Приводной механизм 13. Зубчатое колесо
Приводной механизм 12 через сдвоенное ведущее колесо 3 вращает главный вал 2, тем самым вращая цепь ступенек и заставляя ступеньки перемещаться; Кроме того, на главном валу вращается зубчатое колесо 13, которое посредством приводной цепи 11 вращает зубчатое колесо 5 системы поручней, тем самым заставляя перемещаться и ленты поручней. Размер каждого цепного колеса и число его зубьев спроектированы в соответствии с требованиями к работе эскалатора. Все цепи легко собираются и разбираются, имеют достаточную прочность и жесткость.
3.3. Изобразите схему сил, действующих на ходовую часть эскалатора, приведите последовательность тягового расчета с указанием основных расчетных зависимостей.
Дата добавления: 2019-07-15; просмотров: 933; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!