Частоту и период колебаний системы.
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
КУРГАНСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
Кафедра «АВТОМОБИЛИ»
С.Н. Синицын
ПРИКЛАДНАЯ ТЕОРИЯ КОЛЕБАНИЙ
Методические указания к выполнению контрольной работы для студентов заочной формы обучения направления 190100.62, 190109.65
Курган 2013
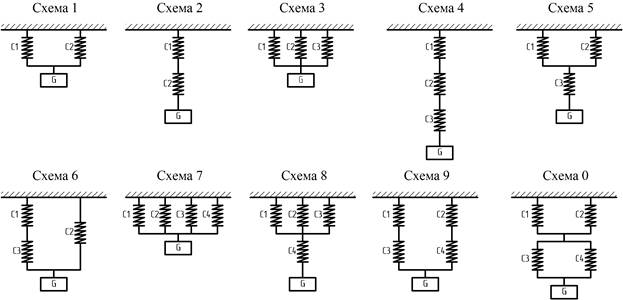
Задача 1
Определить эквивалентную жесткость упругих элементов консервативной колебательной системы без затухания и частоту собственных колебаний системы.
Вариант исходных данных выбирается по предпоследней цифре зачетки, а номер схемы – по последней цифре зачетки. Например, если зачетка заканчивается на 46, то выбираем вариант 4, схему 6.
Варианты исходных данных:
| № Варианта | Масса груза, m, кг | Параметры пружин | |||||||||||
| C1 | C2 | C3 | C4 | ||||||||||
| d, мм | D, мм | n | d, мм | D, мм | n | d, мм | D, мм | n | d, мм | D, мм | n | ||
| 0 | 50 | 6 | 80 | 8 | 10 | 100 | 10 | 6 | 80 | 10 | 8 | 100 | 8 |
| 1 | 75 | 8 | 80 | 10 | 8 | 100 | 12 | 8 | 80 | 8 | 10 | 100 | 8 |
| 2 | 100 | 6 | 100 | 8 | 12 | 120 | 8 | 10 | 100 | 10 | 8 | 80 | 10 |
| 3 | 30 | 4 | 60 | 10 | 6 | 80 | 6 | 4 | 80 | 8 | 6 | 60 | 8 |
| 4 | 60 | 8 | 100 | 12 | 10 | 80 | 8 | 6 | 100 | 8 | 6 | 80 | 10 |
| 5 | 150 | 12 | 100 | 10 | 10 | 80 | 10 | 12 | 80 | 10 | 10 | 100 | 8 |
| 6 | 120 | 10 | 80 | 8 | 8 | 60 | 8 | 10 | 80 | 8 | 12 | 100 | 10 |
| 7 | 45 | 6 | 60 | 6 | 8 | 80 | 10 | 6 | 100 | 8 | 6 | 80 | 8 |
| 8 | 85 | 10 | 120 | 8 | 10 | 80 | 10 | 8 | 100 | 12 | 12 | 100 | 8 |
| 9 | 90 | 12 | 120 | 10 | 10 | 120 | 8 | 8 | 100 | 12 | 10 | 100 | 10 |
Номера схем:
|
|
|
Указания по решению задачи:
Жёсткостью пружины с называется отношение силы F, приложенной к пружине, к деформации пружины s, вызванной этой силой. Для винтовой цилиндрической пружины жёсткость рассчитывается по формуле:
c = G∙d4/(8∙n∙D3),
где G – модуль сдвига [Н/м2], для стали G=90×109 Н/м2;
d – диаметр проволоки [м];
n – число витков;
D – диаметр пружины [м].
Единица измерения жёсткости в системе СИ – Н/м.
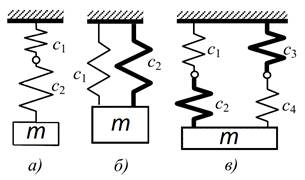
Рис.1. Схемы соединения пружин
Общий коэффициент жёсткости подвеса для схем с последовательным соединением пружин (рис. 1, а): найдём, исходя из следующих положений. Каждая пружина нагружена одним и тем же весом, и удлинение каждой в отдельности пружины равно λ1=m·g/c1 и λ2=m·g/c2. Полное статическое перемещение груза составит:
λст=λ1+λ2=m·g/c1+m·g/c2=m·g·(1/c1+1/c2)=m·g·[(c1+c2 )/c1·c2]
По определению жёсткость пружины для эквивалентной системы равняется c=m·g/λст, тогда для последовательного соединения:
|
При параллельном соединении пружин (рис. 1, б) исходим из того, что каждая пружина должна изменять свою длину на одинаковую величину. В результате чего имеем:
λст=λ1=λ2=m·g/c
Вес распределён по пружинам как m·g=Fупр1+Fупр2. Восстанавливающие силы в пружинах 1 и 2 соответственно равны: Fупр1=c1·λст; Fупр2=c2·λст. И также m·g = c·λст. Следовательно:
|
|
|
c·λст = c1·λст+c2·λст
Окончательно эквивалентная жёсткость параллельно соединённых пружин равна сумме их жёсткостей:
|
Эквивалентную жёсткость для системы пружин смешанного типа (последовательно-параллельного), изображённой на рис. 1, г, находят с помощью формул (1) и (2). Сначала вычисляют для пружин жёсткостью c1 и c2 их эквивалентную жёсткость c1эк по формуле (1), также для второй пары пружин c 3 и c 4 – c2эк . Затем через найденные значения c1эк и c2эк по формуле (2) находят эквивалентную жёсткость всей системы.
Для консервативной системы без затухания частота собственных колебаний находится по формуле:
 , [Гц]
, [Гц]
Задача 2
На рисунке 2 представлена система балки с грузом и присоединённым жидкостным демпфером. Демпфер присоединён нарасстоянии l2 от шарнира О. Демпфирование принять линейным, то есть пропорциональным скорости колебаний Fсопр=h·v, где h – коэффициент линейного вязкого сопротивления; v–колебательная скорость.
Определить:
Частоту и период колебаний системы.
Дата добавления: 2019-07-15; просмотров: 172; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!