Аппроксимация полиномом первого порядка
Модель первого порядка описывается уравнением вида: 
y=a∙x+b

Для нахождения коэффициентов а и b составим систему линейных алгебраических уравнений, причем число уравнений в системе равно числу состояний объекта в эксперименте.
Для решения данной системы алгебраических уравнений воспользуемся матричным методом наименьших квадратов. Составим матрицы входных и выходных сигналов:

Получим систему с двумя неизвестными: X . A = Y
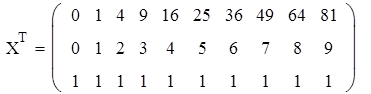
Транспонируем матрицу Х:

Умножив слева обе части исходной системы на транспонированную матрицу коэффициентов, получим систему, число уравнений в которой равно числу неизвестных, а решение этой системе будет доставлять минимум критерий оптимизации.
XT . X . A = XT . Y



Получим систему двух линейных алгебраических уравнений первого порядка:

Найдем главный определитель матрицы:

Найдем вспомогательные определители системы:


Найдем коэффициенты а и b:

Таким образом, получим полином:
у =0.428 . х - 0.198
Для оценки полученного полинома вычислим значения функции и сравним их с экспериментальными данными.

Результаты вычисления сведем в таблицу. таблица 2
| i | x | y | yi | Δyi |
| 1 | 0 | 0 | -0.198 | 0.198 |
| 2 | 1 | 0.1 | 0.203 | -0.130 |
| 3 | 2 | 0.5 | 0.658 | -0.158 |
| 4 | 3 | 1 | 1.086 | -0.086 |
| 5 | 4 | 1.5 | 1.514 | -0.014 |
| 6 | 5 | 2 | 1.942 | 0.058 |
| 7 | 6 | 2.5 | 2.370 | 0.130 |
| 8 | 7 | 3 | 2.798 | 0.202 |
| 9 | 8 | 3.2 | 3.226 | -0.026 |
| 10 | 9 | 3.5 | 3.654 | -0.154 |
|
|
|
Сумма квадратов отклонений:
å Dуi 2 = 0.174
Ниже приведен проверочный расчет модели объекта первого порядка на ЭВМ в системе MathCad.


Аппроксимация полиномом второго порядка
Модель второго порядка описывается уравнением вида:
у = а . х  + b . х + с.
+ b . х + с.
Для нахождения коэффициентов а, b, с, удовлетворяющих всем состояниям объекта регулирования составим систему алгебраических уравнений второго порядка, причем число уравнений в системе равно числу состояний объекта в эксперименте:

Для решения данной системы алгебраических уравнений воспользуемся матричным методом наименьших квадратов. Составим матрицы входных и выходных сигналов:
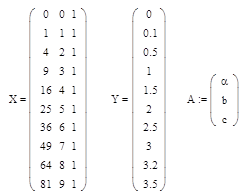
Получим систему с тремя неизвестными: X . A = Y
 .
.
Решим матричное уравнение:
Х т . Х . А = Х т . У
где А - матрица коэффициентов полинома второго порядка.

 |
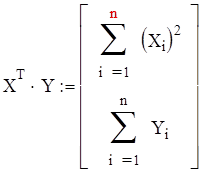
Получим систему трех алгебраических уравнений

Решив ее, определим коэффициенты a, b, c.
Найдем главный определитель системы:

Найдем вспомогательные определители системы:
Найдем коэффициенты a,b,c:



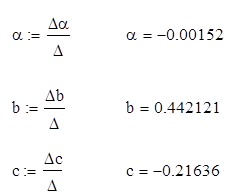
Таким образом, получили полином второго порядка:
|
|
|
y = -0.00152 . xi2 + 0.442121 . xi -0.21636
Для оценки полученного полинома вычислим значения функции и сравним их с экспериментальными данными:

Полученные результаты сведем в таблицу 3
| i | x | y | yi | Δy |
| 1 | 0 | 0 | -0.216 | 0.216 |
| 2 | 1 | 0.1 | 0.224 | -0.124 |
| 3 | 2 | 0.5 | 0.662 | -0.162 |
| 4 | 3 | 1 | 1.096 | -0.096 |
| 5 | 4 | 1.5 | 1.528 | -0.028 |
| 6 | 5 | 2 | 1.956 | 0.044 |
| 7 | 6 | 2.5 | 2.382 | 0.118 |
| 8 | 7 | 3 | 2.804 | 0.196 |
| 9 | 8 | 3.2 | 3.224 | -0.024 |
| 10 | 9 | 3.5 | 3.640 | -0.14 |
Сумма квадратов отклонений равна: åDуi 2 = 0.173
Ниже приведен проверочный расчет модели объекта первого порядка на ЭВМ в системе MathCad.


Сравнивая суммы квадратов отклонений видно, что полином второго порядка лишь немногим точнее описывает поведение объекта, чем полином первого порядка. Из чего следует, что поведение объекта подчиняется уравнению очень близкому уравнению линии. Для расчетов используем уравнение найденное с помощью полинома второго порядка.
Дата добавления: 2019-07-15; просмотров: 836; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!