Физические основы ультразвукового неразрушающего контроля
СОДЕРЖАНИЕ
1.Введение.
2.Формирование ПОДХОДОВ К РЕАЛИЗАЦИИ ультразвуковых технологий и методов контроля.
3.ФИЗИЧЕСКИЕ ОСНОВЫ НЕРАЗРУШАЮЩЕГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ
3.1.Природа и типы ультразвуковых волн.
3.2.Параметры ультразвуковых волн.
3.3.Горизонтально- и вертикально поляризованные волны (SV – и SH –волны).
3.4. Коэффициенты отражения и прохождения.
3.5. Затухание ультразвука.
3.6. Отражение, преломление и трансформация ультразвуковых волн.
4. Решение задач о рассеянии плоских волн на микрошероховатой границе раздела твердых сред
4.1.Формирование граничных условий в приближении «линейного скольжения».
4.2.Продольная волна.
4.3. Поперечная SV-волна.
4.4. Поперечная SH-волна.
4.5. Выводы.
5. ЗАКЛЮЧЕНИЕ
6. ЛИТЕРАТУРА
7. ПРИЛОЖЕНИЯ
Введение.
Ультразвуковой контроль является одним из лучших методов, который в течение десятилетий разрабатывался для применений во многих областях технического контроля.
Ультразвуковой контроль при нормальном падении упругих волн оказался полезным для расчета модулей упругости обследуемых материалов и толщины образцов из них и для других целей.
Также известно, что коэффициенты отражения и прохождения объемных волн при наклонном падении чувствительны к состоянию «акустической» связи на границах раздела сред. Дополнительным преимуществом является возможность одновременной проверки большой длины или площади образца. Амплитуда и скорости направленной волны относятся к числу особенностей выбранного метода исследований. Еще одним преимуществом контроля с помощью упругих волн является возможность максимизировать чувствительность по отношению к различным типам условий обследования путем возбуждения соответствующих форм мод колебаний путем выбора соответствующих комбинаций частоты и скорости.
|
|
|
Ультразвуковые процессы основаны на изменяющихся во времени деформациях или вибрациях в материалах, которые обычно называют акустическими процессами. Все материальные вещества состоят из атомов, которые могут быть вынуждены совершать колебательные движения вокруг своих положений равновесия. На атомном уровне существует множество различных моделей колебательного движения, однако большинство из них не имеют отношения к акустике и ультразвуковым испытаниям. Акустика ориентирована на частицы, которые содержат много атомов, которые движутся в унисон, чтобы произвести механическую волну. Когда материал не подвергается растяжению или сжатию за границы своего предела упругости, то его отдельные частицы совершают упругие колебания. Когда частицы среды вытесняются из своих положений равновесия, возникают внутренние (динамические) силы восстановления. Именно эти упругие восстанавливающие силы между частицами в сочетании с инерцией частиц приводят к колебательным движениям среды.
|
|
|
В твердых телах ультразвуковые волны могут распространяться в четырех основных режимах, основанных на способе и формах колебаний частиц. Ультразвук может распространяться в безграничных однородных твердых упругих средах, как продольные волны, поперечные волны, поверхностные волны, а в «тонких» объектах (пластинах) - как Нормальные (пластинчатые) волны или волны Лэмба. Продольные волны и поперечные волны (волны сдвига) являются двумя видами колебательных процессов, (объемных волн) наиболее широко используемыми при ультразвуковом контроле.
Если границы раздела двух сред связаны между собой условиями жесткого «сварного» контакта, при котором все компоненты упруго поля (смещения и напряжения) передаются без изменений, то решение обратной задачи, направленной на определение импедансов прилегающих к границе сред не вызывает затруднений.
В работе исследован важный для практических приложений случай отклонения граничных условия от «идеальных» и получивший в литературе название граничных условий в приближении «линейного скольжения» [ ].
|
|
|
2.Формирование ПОДХОДОВ К РЕАЛИЗАЦИИ ультразвуковых технологий и методов контроля.
Перед Второй мировой войной, сонар, техника посылки звуковых волн через воду и наблюдения за возвращающимся эхом, чтобы охарактеризовать затопленные объекты, вдохновила ранних исследователей ультразвука исследовать способы применить эту концепцию к медицинской диагностике. В 1929 и 1935 годах Соколов изучал использование ультразвуковых волн при обнаружении металлических предметов. В 1931 году Мюльхаузер получил патент на использование ультразвуковых волн с использованием двух преобразователей для обнаружения дефектов в твердых телах. Firestone (1940) и Simons (1945) разработали импульсное ультразвуковое тестирование с использованием метода импульсного эха.
Вскоре после окончания Второй мировой войны исследователи в Японии начали изучать медицинские диагностические возможности ультразвука. Первые ультразвуковые инструменты использовали презентацию в А-режиме с всплесками на экране осциллографа. Затем последовала презентация в B-режиме с двухмерным изображением в оттенках серого.
|
|
|
Работа Японии в области ультразвука была относительно неизвестна в Соединенных Штатах и Европе до 1950-х годов. Затем исследователи представили международное медицинское сообщество свои выводы об использовании ультразвука для выявления камней в желчном пузыре, массы молочной железы и опухолей. Япония также была первой страной, применившей ультразвуковое доплеровское исследование, ультразвуковое исследование, которое обнаруживает внутренние движущиеся объекты, такие как кровь, текущая через сердце, для исследования сердечно-сосудистой системы.
Пионеры ультразвука, работающие в Соединенных Штатах, внесли много инноваций и важных открытий в области в течение следующих десятилетий. Исследователи научились использовать ультразвук для выявления потенциального рака и визуализации опухолей у живых людей и в удаленных тканях. Визуализация в реальном времени, еще один важный диагностический инструмент для врачей, представляла ультразвуковые изображения непосредственно на экране ЭЛТ системы во время сканирования. Введение спектрального “доплера”, а затем цветного “доплера” изображало кровоток различными цветами, чтобы указать скорость и направление потока.
Неразрушающий контроль практиковался в течение многих десятилетий, причем первые быстрые разработки в области измерительной техники стимулировались технологическими достижениями, которые произошли во время Второй мировой войны и последующими усилиями по обороне. В первые дни основной целью было обнаружение дефектов. В рамках конструкции «безопасной жизни» предполагалось, что конструкция не должна проявлять макроскопические дефекты в течение срока ее службы, причем обнаружение таких дефектов является причиной снятия компонента с эксплуатации. В ответ на эту потребность появились все более изощренные методы, использующие ультразвук, вихревые токи, рентгеновские лучи, пенетранты-красители, магнитные частицы и другие формы запрашиваемой энергии.
В начале 1970-х годов произошли два события, которые вызвали серьезные изменения в области неразрушающего контроля. Во-первых, усовершенствование технологии привело к способности обнаруживать небольшие дефекты, которые вызывали отклонение большего количества деталей, даже если вероятность отказа компонента не изменилась. Однако появилась дисциплина механики разрушения, которая позволила предсказать, будет ли трещина заданного размера разрушаться при определенной нагрузке, когда известны свойства вязкости разрушения материала. Другие законы были разработаны для прогнозирования скорости роста трещин при циклическом нагружении (усталости). С появлением этих инструментов стало возможным принимать конструкции, содержащие дефекты, если известны размеры этих дефектов. Это послужило основой для новой философии «дизайна, устойчивого к повреждениям». Компоненты, имеющие известные дефекты, могут продолжать эксплуатироваться до тех пор, пока не будет установлено, что эти дефекты не увеличатся до критического размера, приводящего к отказам.
Таким образом, перед сообществом неразрушающего контроля была поставлена новая задача. Обнаружения было недостаточно. Также необходимо было получить количественную информацию о размере дефекта, которая послужит входом для прогнозов оставшейся жизни на основе механики разрушения. Потребность в количественной информации была особенно острой в оборонной и атомной энергетике и привела к появлению количественной неразрушающей оценки (QNDE) в качестве новой инженерной исследовательской дисциплины. Был запущен ряд исследовательских программ по всему миру, таких как Центр неразрушающего контроля в Университете штата Айова (в результате масштабных исследований в Международном научном центре Роквелла); Научно-исследовательский институт электроэнергии в Шарлотте, Северная Каролина; Институт неразрушающего контроля Фраунгофера в Саарбрюккене, Германия; и Центр неразрушающего контроля в Харуэлле, Англия.
Физические основы ультразвукового неразрушающего контроля
3.1.Природа и типы ультразвуковых волн
Колебания – возможные отклонения от положения равновесия, которые производятся материальной точкой под действием какой-нибудь силы. В случае, когда движущая сила возрастает пропорционально отклонению, такую силу называют упругой, а колебания – упругими или гармоническими.
Гармонический колебательный процесс может быть описан выражением  , где отклонение ξ, равное расстоянию колеблющейся точки от положения равновесия в произвольный момент времени t, называют смещением или амплитудой, ξ0 –максимальная амплитуда ее смещения, величину ωt + φ0, являющуюся аргументом косинуса, называют фазой, а параметр φ0 – начальной фазой колебания. Вместе с амплитудой ξ0 начальная фаза φ0 определяет положение, и скорость колеблющейся точки в начальный момент времени. Параметр
, где отклонение ξ, равное расстоянию колеблющейся точки от положения равновесия в произвольный момент времени t, называют смещением или амплитудой, ξ0 –максимальная амплитуда ее смещения, величину ωt + φ0, являющуюся аргументом косинуса, называют фазой, а параметр φ0 – начальной фазой колебания. Вместе с амплитудой ξ0 начальная фаза φ0 определяет положение, и скорость колеблющейся точки в начальный момент времени. Параметр  называют круговой частотой (рад/с), в отличие от частоты f, равной числу полных колебаний в одну секунду ( 1Гц = 11/с).
называют круговой частотой (рад/с), в отличие от частоты f, равной числу полных колебаний в одну секунду ( 1Гц = 11/с).
Упругие колебания имеют возможность возникать в любой материальной среде. Присутствие упругих межмолекулярных связей в среде между частицами позволяет передавать энергию частиц, которые колеблются, соседним частицам и приводит к тому, что их смещения передаются от одного слоя частиц к другому во всевозможных направлениях.
Ультразвуковые волны могут распространяться через среду как волны напряжения или деформации, в зависимости от упругих свойств среды. На основе критерия характера смещения частиц среды ультразвуковые волны подразделяются на три типа или моды:
1. Ультразвуковые продольные или сжатые волны или волны давления (рисунок 2.1). В продольных волнах частицы среды колеблются взад и вперед параллельно направлению распространения волны. Эти волны распространяются через среду в виде серии попеременного сжатия и разрежения. Эти волны наиболее широко используются при ультразвуковом контроле материалов, они являются наиболее быстрыми волнами, их скорость равна примерно 5900 м/с. Этот режим проявляется, когда среда распространения не имеет границ, то есть имеет бесконечный промежуток. Из-за распространения этих волн давление и плотность среды периодически колеблются. Путем преломления и отражения продольные волны могут трансформироваться в поперечные волны.
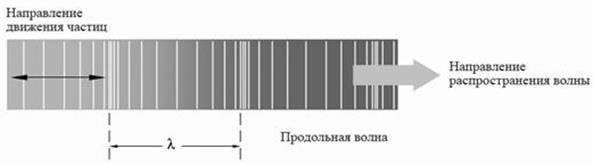
Рисунок 2.1. Распространение продольных волн.
2. Поперечные или сдвиговые ультразвуковые волны (рисунок 2.2). Поперечные волны характеризуются колебанием частиц перпендикулярно направлению распространения волн. В этом случае среда периодически испытывает сдвиговые деформации. В отличии от продольных волн, поперечные имеют меньшую скорость распространения и более меньшую длину, при контроле ультразвуком используются наклонные излучатели. Скорость распространения в стали поперечной волны около 3250 м/с. Появление и распространение этих волн возможно только в твердых средах. Как и продольные волны поперечные могут быть преобразованы в продольные путем преломления и отражения на границе раздела двух сред.

Рисунок 2.2. Распространение поперечных волн.
3. Поверхностные волны или волны Рэлея (рисунок 2.3). Поверхностные волны распространяются вдоль плоской или изогнутой поверхности толстых твердых тел, не влияя на объем среды под поверхностью. Глубина, на которую эти волны распространяются ниже поверхности со значительной интенсивностью, приблизительно равна (1-1,5)λs и благодаря этому распространяется на большие расстояния вдоль поверхности твердого тела. Скорость поверхностных волн приблизительно 90% скорости распространения поперечных волн. Практически вся ее энергия ослабляется в пределах этой глубины. Эти волны используются для обнаружения трещин или дефектов на поверхности или вблизи поверхности тестируемых объектов. При распространении поверхностных волн частицы среды описывают эллиптические орбиты. Данную волну можно сравнить с океанической волной.

Рисунок 2.3. Распространение волн Рэлея.
4. Головные волны. Волны, которые распространяются вдоль свободной поверхности твердого тела со скоростью объемной продольной волны, состояние поверхности не влияет на ее распространение и ультразвуковой луч не повторяет волнистость поверхности. Волна не чувствительна к поверхностным дефектам (на глубине меньше длины волны) и в зависимости от расстояния от преобразователя (10-50 мм) имеет максимум чувствительности на глубине не более 10 мм. Амплитуды головной волны отличается от амплитуды продольной более быстрым уменьшением вследствие непрерывного переизлучения в среду в виде поперечной волны. Данная волна возбуждается при первом критическом угле и имеет быстрое затухание, т.к. она создает боковые волны под углом 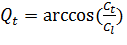 , которые в свою очередь распространяются в глубь среды.
, которые в свою очередь распространяются в глубь среды.
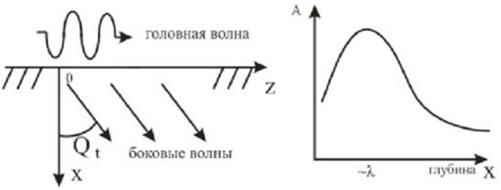
Рисунок 2.4. Распространение головных волн.
1.
2.
2.1
3.2.Параметры ультразвуковых волн
Ультразвуковые волны характеризуются следующими основными параметрами: длиной волны λ (м), скоростью распространения волн С (м/с), колебательной скоростью частиц среды V (м/с), частотой f (Гц).
Длина волны λ является главным параметром любой волны. Она равна отрезку пути, пробегаемому волной за период Т времени, в течение которого происходит полный цикл одного колебания, т.е. λ=С.Т. Например для продольных волн это некоторое постоянное значение расстояния, через которое чередуются зоны сжатия и разрежения, и участки сдвига вверх – вниз для поперечных. Длина волны λ – это внутренняя согласованная мера, относительно которой определяются, и через которую связаны многие параметры волн, аппаратуры, среды.
Если учесть, что Т=1/f, то λ представляется в виде  .
.
Это основное соотношение в теории колебаний. Оно справедливо для всех волновых процессов. Отметим важное обстоятельство. Характеристикой источника колебаний является частота f, возбуждающая волну, скорость С – значение материала среды, в которой данная волна движется.
Как можно заметить из уравнения, увеличение частоты приведет к уменьшению длины волны. Например, скорость продольных волн в стали составляет 5850 м/с, что приводит к длине волны 5,85 мм при частоте 1 МГц.
При ультразвуковом контроле инженер должен принять решение о частоте преобразователя, который будет использоваться для контроля длины волны. Длина волны используемого ультразвука оказывает существенное влияние на вероятность обнаружения дефекта. Общее эмпирическое правило заключается в том, что дефект должен быть больше половины длины волны, чтобы иметь больший шанс быть обнаруженным.
Чувствительность и разрешение - это два термина, которые часто используются при ультразвуковом контроле для описания способности метода определять недостатки. Чувствительность - это способность находить небольшие разрывы. Чувствительность обычно увеличивается с более высокой частотой (короткие волны). Разрешение - это способность системы обнаруживать разрывы, которые расположены близко друг к другу в материале или расположены вблизи поверхности детали. Разрешение также обычно увеличивается с увеличением частоты.
Частота волны также может отрицательно влиять на возможности проверки. Поэтому выбор оптимальной частоты проверки часто включает поддержание баланса между благоприятными и неблагоприятными результатами выбора. Прежде чем выбирать частоту контроля, следует рассмотреть структуру и толщину зерна материала, а также тип, размер и возможное расположение несплошности. При увеличении частоты звук имеет тенденцию рассеиваться от крупной структуры или структуры зерна и от небольших дефектов в материале. Литые материалы часто имеют крупное зерно и поэтому требуют более низких частот для оценки этих продуктов. Кованые изделия с направленной и тонкой структурой зерна обычно проверяют с помощью высокочастотных преобразователей.
Поскольку в материале велика вероятность рассеяния звуковой энергии на более высоких частотах, глубина проникновения (максимальная глубина в материале, в котором могут быть обнаружены дефекты) также уменьшается. Частота также влияет на форму ультразвукового луча. Разброс луча или расхождение луча от центральной оси преобразователя и то, как на него влияет частота, будут обсуждаться позже.
Следует отметить, чтобы не вводить в заблуждение, что ряд других переменных также будет влиять на способность ультразвука обнаруживать дефекты. К ним относятся длина импульса, тип и напряжение, приложенное к кристаллу, свойства кристалла, материал подложки, диаметр преобразователя и схема приемника прибора.
Длина волн для принятой в МПС частоты 2,5 МГц составляет миллиметры. Поэтому детали размером в десятки миллиметров можно считать бесконечными, что дает основание рассматривать существование продольных и поперечных волн раздельным, независимым.
Фронт волны – граница, отделяющая колеблющейся частицы от частиц среды, еще не начинавших колебаться. В зависимости от вида поверхности фронта волны последнюю разделяют на несколько типов: плоскую – возбуждается колеблющейся плоскостью, которая в свою очередь должна быть бесконечной (рисунок 2.5, а); сферическую – возбуждается точечным источником колебаний (рисунок 2.5, б); цилиндрическую – возбуждается источником колебаний, который представляет собой длинный цилиндр малого диаметра, например нить (рисунок 2.5, в).
Плоской волны не существует, так как для ее излучения требуется бесконечная плоскость и, следовательно, бесконечная мощность, что не возможно. Реальные источники создают сферические волны, но плоская волна удобна для анализа и моделирования процессов ультразвукового контроля. Если использовать точечный источник колебаний, то на большом расстоянии от него, по крайней мере, превышающем длину волны, сферическую волну в первом приближении можно считать плоской.
Рисунок 2.5. Распространение волн от разнообразных источников.
Колебательная скорость ν движения частиц. Ее следует отличать от понятия скорости С распространения волны. Если последняя характеризует скорость распространения возбуждения или определенного состояния среды (сжатия или положения «гребня»), то колебательная скорость характеризует скорость механического движения частиц в процессе их смещения относительно положения равновесия.
Акустический импеданс является одним из важных.
Звук распространяется сквозь материалы под воздействием звукового давления. Поскольку молекулы или атомы твердого тела упруго связаны друг с другом, избыточное давление приводит к распространению волны через твердое тело.
Акустический импеданс (Z) материала определяется как произведение его плотности (ρ) и скорости звука в этом материале (С).
Z= ρC. (2.1)
Его называют еще удельным акустическим сопротивлением. Если сопротивление Z имеет большее значение, то среда называется «жесткой» (акустически твердой): колебательные скорости V и смещения ξ частиц малы даже при высоких давлениях. Если же импеданс Z невелик, то среда называется «мягкой» (податливой): даже при малых давлениях Р достигаются значительные колебательные скорости V и смещения ξ. Таким образом, давление в волне прямо пропорционально акустическому сопротивлению Z и колебательной скорости V движения частиц .
Интенсивность I является энергетическим параметром волны. Она характеризует количество энергии, которое упругая волна несет в направлении своего распространения в единицу времени 1 с через поперечное сечение площадью 1 м2 под углом θ к его нормали.
Акустический импеданс важен в:
• Определение акустического пропускания и отражения на границе двух материалов, имеющих разные акустические сопротивления.
• Конструкция ультразвуковых преобразователей.
• Оценка поглощения звука в среде.
3.2.Горизонтально и вертикально поляризованные волны (SH И SV волны)
Сдвигаемые горизонтальные (SH) ультразвуковые волны используются во все большем числе применений неразрушающего контроля (НК). Одним из преимуществ SH-волн по сравнению с некоторыми типами волн является их способность распространяться вокруг изогнутых поверхностей с минимальными потерями энергии
Сдвиговые горизонтальные (SH) ультразвуковые волны поляризованы в плоскости относительно эталонной границы (как правило, поверхности образца) и представляют собой форму управляемой волны, хотя их можно рассматривать как объемные волны при определенных условиях, например при коротких замыканиях расстояния распространения. Существует несколько симметричных и антисимметричных мод SH-волн; фазовые и групповые скорости зависят от частоты, толщины образца и скорости объемной волны сдвига. В этой работе используется только SH-мода самого низкого порядка, SH0 (и частоты генерации выбираются для генерации преимущественно этой моды), которая является симметричной «бездисперсионной» модой, и имеет скорость, равную скорости объемной поперечной волны в среде.
Обнаружено, что ультразвуковой излучатель SH движется вокруг сильно изогнутых участков среды распространения с незначительным отражением, что позволяет проводить проверки, несмотря на такие изгибы между излучающим и принимающим EMAT и проверяемым участком. Алюминиевый лист толщиной 0,83 мм был помещен в гибочный станок, и был введен небольшой изгиб. Электромагнитно-акустические преобразователи с периодическим полюсом (PPM) (EMAT) для излучения и приема SH-волн были размещены на одной и той же стороне изгиба, так что отраженные волны были приняты. Дополнительный изгиб листа продемонстрировал четкую связь между углами изгиба и отраженным сигналом. Модели предполагают, что отражение представляет собой линейную суперпозицию отражений от каждого изгибного сегмента, так что резкие повороты приводят к большей амплитуде от пика к пику, частично из-за повышенной фазовой когерентности.
Эта работа моделирует и экспериментально измеряет отражение направленной волны SH при встрече с криволинейным участком образца и имеет значение не только для проверок на других плоских образцах, но также для проверок на сосудах и трубах, особенно на изгибах труб и на концы сосудов.
У волн SH есть несколько свойств, которые полезны для неразрушающего контроля (НК). Например, поперечная волна с поляризацией, параллельной границе, отражается без преобразования моды (независимо от угла падения), и амплитуда не изменяется (имеется фазовый сдвиг). Если волны SH поляризованы параллельно направлению аустенитного шва, они будут проходить с меньшим отражением, направлением луча и затуханием по сравнению (например, с вертикальными сдвигами (SV) и волнами сжатия), и они не будут мод преобразовать при взаимодействии с дефектом в сварном шве, который простирается параллельно направлению сварки. Это приводит к увеличению чувствительности к дефектам, и, следовательно, SH-волны идеально подходят для разработки систем ультразвукового контроля сварных швов.
Ка правило возбуждение продольной волны происходит с помощью преобразователя с пластиной, колеблющейся по толщине. Поперечная SV-волна, возбуждается при помощи изменения продольной волны, которая преломляется на поверхности твердого тела, падая из внешней среды. При этом SH-волну таким же путем получить нельзя, т.к. в продольной волне, которая падает, отсутствует составляющая, перпендикулярная плоскости падения. Непосредственно сложность возбуждения ограничивает использование SH-волн. Данные волны возбуждают с помощью электромагнитно-акустических преобразователей, но чаще всего - с помощью пластины кварца Y-среза, которая закреплена на поверхности изделия.
Обычный ультразвуковой контроль (рисунок 2.6) использует SV-волну с углом от 30° до 60° от нормального луча. Поддержание положения зонда имеет решающее значение для получения точного осмотра. Ограничением SV-волн при проверке сварного шва является невозможность покрытия всего вертикального объема материала. В некоторых точках дефекты могут даже ограничить полную проверку.
На рисунке 6 представлена схема прозвучивания шва при помощи решётки преобразователей ЕМАТ. Преимущества использования SH-волн для контроля сварного шва включают в себя: SH-волны заполняют объем материала независимо от толщины, что позволяет контролировать весь сварной шов. Для проверки не требуется «растрового» движения или «фазированной решетки» датчиков, что приводит к использованию космического оборудования для эффективного контроля. Отдельный передатчик и приемник позволяют нормализовать сигнал, гарантируя максимальную надежность. Меньшая чувствительность к позиционированию зонда во время проверки способствует простоте автоматизации и интеграции в производство [1].

Рисунок 2.6. Распространение SV волны
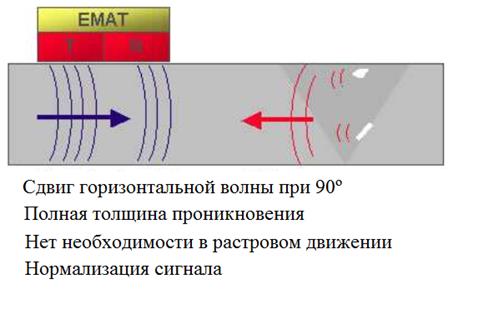
Рисунок 2.7. Распространение SH волны
3.4.Коэффициенты отражения и прохождения
Ультразвуковые волны отражаются на границах, где есть разница в акустических импедансах (Z) материалов на каждой стороне границы. Эта разница в Z обычно упоминается как несоответствие импеданса. Чем больше несоответствие импеданса, тем больше процент энергии, который будет отражаться на границе раздела или границе между одной средой и другой.
Доля отраженной интенсивности падающей волны может быть получена исходя из того факта, что скорость частицы и локальное давление частицы должны быть непрерывными через границу. Когда акустические импедансы материалов по обе стороны границы известны, доля отраженной интенсивности падающей волны (коэффициент отражения) может быть рассчитана как:
 (2.2)
(2.2)
Где Z2 и Z1 - акустические импедансы двух материалов на границе раздела.
Поскольку количество отраженной энергии плюс пройденная энергия должны равняться общему количеству падающей энергии, «коэффициент прохождения» по энергии рассчитывается путем простого вычитания коэффициента отражения из единицы (T = 1 - R).
Взяв, например, модель (рисунок 2.8) на границе раздела из воды и стали, и рассчитав коэффициенты отражения и пропускания (используя информацию об акустическом импедансе), мы получим R = 0,88 и T = 0,12. Это означает, что количество энергии, передаваемой во второй материал, составляет всего 12%, тогда как 88% отражается обратно на границе раздела. Если мы преобразуем величины отражения и передачи в децибелы, мы получим -1,1 дБ и -18,4 дБ соответственно. Отрицательный знак указывает на то, что индивидуально количество отраженной и пройденной энергии меньше энергии падающего излучения.
Если отражение и прохождение в модели осуществляется через компонент, только небольшой процент от первоначальной энергии возвращается в преобразователь, даже если потери из-за затухания игнорируются.
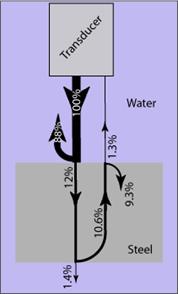
Рисунок 2.8. Модель прохождения и отражения волны на границе раздела двух сред сталь – вода.
Например, рассмотрим проверку погружения стального блока. Звуковая энергия покидает преобразователь, проходит через воду, встречается с передней поверхностью стали, встречается с задней поверхностью стали и отражается обратно через переднюю поверхность на пути обратно к преобразователю. На границе раздела вода-сталь (передняя поверхность) передается 12% энергии. На задней поверхности отражается 88% из 12%, прошедших через переднюю поверхность. Это составляет 10,6% от интенсивности исходной падающей волны. Когда волна выходит из детали обратно через переднюю поверхность, только 12% из 10,6 или 1,3% первоначальной энергии передается обратно на преобразователь.
Обратите внимание, что при таком расчете ослабление сигнала при его прохождении через материал не учитывается. Если принять во внимание, количество сигнала, полученного от преобразователя, будет еще меньше.
3.5.Затухание ультразвуковых волн
По мере удаления фронта ультразвуковой волны от источника ее амплитуда, давление и интенсивность падают и убывают по закону экспоненты, что обусловлено затуханием. Оно определяется физико-механическими характеристиками среды и типом волны и учитывается коэффициентом затухания δ, который является суммой коэффициентов поглощения δП и рассеяния δр, 1/м:
 (2.3)
(2.3)
При рассеянии поток звуковой энергии остается звуковым, но уходит из направленно-распространяющегося пучка. Металлы, применяемые на практике, имеют зернистую структуру. Размеры зерен зависят от химического состава, вида механической и термической обработки деталей. Затухание волн в них обуславливается двумя факторами: рефракцией и рассеянием вследствие анизотропии механических свойств. В результате рефракции фронт волны отклоняется от прямолинейного направления распространения, и амплитуда принимаемых сигналов резко падает. Кроме того, волна, падающая на поверхность границы зерна, испытывает частичное отражение и преломление ультразвука и трансформацию, что и определяет механизм рассеяния. Рассеяние в отличие от фракции приводит не только к ослаблению сигнала, но и к образованию шумов. Явление рассеяния тем сильнее, чем больше средний размер зерна по сравнению с длиной ультразвуковой волны.
Явления поглощения и рассеяния ослабляют ультразвуковую волну тем сильнее, чем больший путь в среде она проходит.
3.6.Отражение, преломление и трансформация ультразвуковых волн
Когда ультразвуковая волна проходит через границу раздела между двумя материалами под косым углом, и материалы имеют разные показатели преломления, возникают как отраженные, так и преломленные волны, т.е. одна часть энергии проходит во вторую среду, а другая – отражается в первую среду.
На границе раздела происходят основные явления: отражение, преломление и трансформация волн. Преломление – это изменение направления распространения волны, а трансформация – преобразование (превращение) волны одного типа в другой. Преломление происходит на границе раздела двух материалов из-за разницы в акустических скоростях между этими двумя материалами. На рисунке 2.9 показан случай, когда плоские звуковые волны, распространяющиеся в одном материале, попадают во второй материал с более высокой акустической скоростью. Когда волна встречает границу раздела между этими двумя материалами, часть волны во втором материале движется быстрее, чем часть волны, которая все еще находится в первом материале.
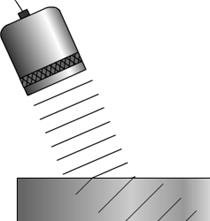
Рисунок 2.9. Распространение плоских звуковых волн на границе раздела двух сред.
Переходы исходного состояния волны в другие связаны энергетическими соотношениями, определяемыми, главным образом, типом падающей волны, углом ее падения и соотношением удельных акустических сопротивлений обеих сред.
Закон Снеллиуса описывает связь между углами и скоростями волн. Закон Снеллиуса приравнивает отношение скоростей материала к отношению углов падающего и преломленного синусов, как показано в следующем уравнении:
 (2.4)
(2.4)
где  скорости продольной волны в первом и втором материалах соответственно;
скорости продольной волны в первом и втором материалах соответственно;
 углы падающей и преломленной волн соответственно.
углы падающей и преломленной волн соответственно.
Когда звук распространяется в твердом материале, одна форма энергии волны может быть преобразована в другую форму. Например, когда продольная волна ударяется о поверхность раздела под углом, часть энергии может вызвать движение частиц.
Преобразование мод происходит, когда волна сталкивается с границей раздела между материалами с различными акустическими импедансами, а угол падения не является нормальным для границы раздела. Следует отметить, что преобразование мод происходит «каждый раз», когда волна сталкивается со средой под углом. Это преобразование мод происходит как для части волны, которая проходит через среду, так и для части, которая отражается от границы материала.
Ранее было отмечено, что когда звуковые волны проходят через границу раздела между материалами, имеющими различные скорости звука, на границе происходит преломление. Чем больше разница в акустических скоростях между двумя материалами, тем больше преломляется звук. Однако преобразованная поперечная волна преломляется не так сильно, как продольная волна, потому что поперечные волны распространяются медленнее, чем продольные. Следовательно, разница в скорости между падающей продольной волной и поперечной волной не так велика, как между падающей и преломленной продольной волнами. Стоит принять во внимание, что когда продольная волна отражается внутри материала, отраженная поперечная волна отражается под меньшим углом, чем отраженная продольная волна. Это также связано с тем, что скорость сдвига меньше, чем продольная скорость в данном материале.
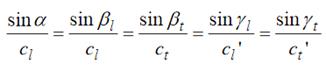
Закон синусов (закон Снеллиуса) справедлив для сдвиговых и продольных волн и может быть записан следующим образом:
 (2.5)
(2.5)
где с — скорость падающей (продольной или поперечной) волны;  и
и  — скорости продольных и поперечных волн, для нижней среды они помечены индексом «штрих». Если одна или обе среды - твердые тела, то из закона «синусов» следует, что возможно существование нескольких критических углов.
— скорости продольных и поперечных волн, для нижней среды они помечены индексом «штрих». Если одна или обе среды - твердые тела, то из закона «синусов» следует, что возможно существование нескольких критических углов.
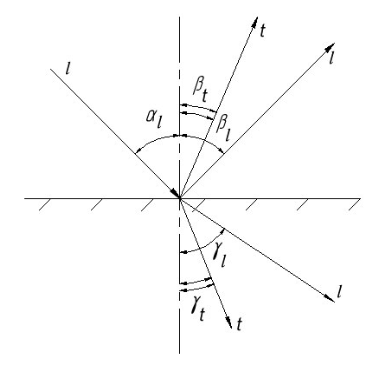
Рисунок 2.10. Отражение и преломление волн на границе двух сред
Когда продольная волна движется от более медленного материала к более быстрому под углом (и, следовательно, волна преломляется), возникает угол падения, который делает угол преломления «продольной волны» равным 90 °. Этот угол известен как «первый критический угол». Первый критический угол может быть найден из закона Снеллиуса, если ввести угол 90 ° для угла преломленного луча. При критическом угле падения большая часть акустической энергии имеет вид неоднородной волны сжатия, которая проходит вдоль границы раздела и экспоненциально затухает с глубиной от границы раздела. Эту волну иногда называют «головной волной». Из-за ее неоднородности и того факта, что она быстро ослабевает, головные волны используются не так широко, как поверхностные волны Рэлея в неразрушающем контроле.
В зависимости от длины продольной волны это может быть прямая, продольная и поперечная или только поперечная поверхностная волна. Длина волны не подчиняется линии длины волны (рисунок 2.11, а) β0 = 0º. При нормальном падении продольной волны во второй среде будет распространяться только продольная волна (трансформации волн не будет).
Трансформация волн возникает по мере увеличения угла (рисунок 2.11, б).
Это первый критический угол (рисунок 2.11, в). При углах падения она представляет собой неоднородную продольную длину волны, которая излучает боковые поперечные волны. Возникает головная волна. Для оргстекла-стали первый критический угол составляет β1кр = 27º.
Второй критический угол (рисунок 2.11, г) возникает при дальнейшем увеличении угла падения продольной волны, объемные волны во второй среде не возбуждаются β2кр = 57º. Появляется поверхностная Рэлевская волна, скорость которой меньше скорости поперечных волн.
Рисунок 10, д иллюстрирует обстоятельство, когда на границу раздела двух сред падает поперечная волна, и явление трансформации волн также имеет место.
Третий критический угол существует, в случае если из твердого тела на его границу падает поперечная волна, в свою очередь продольная преломленная волна будет распространяться по поверхности раздела сред.
Когда угол падения больше первого критического угла, в материал распространяется только сдвинутая по моде поперечная волна. По этой причине большинство датчиков угловых лучей используют сдвиговую волну, чтобы сигнал не усложнялся наличием двух волн.
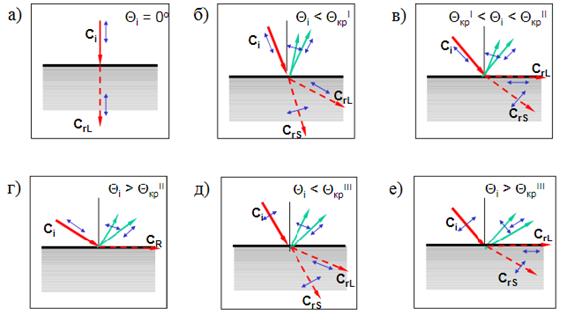
Рисунок 2.11. Прохождение (преломление и трансформация) волн на границе раздела сред.
Во многих случаях также существует угол падения, который делает угол преломления для «поперечной волны» равным 90 °. Это известно как «второй критический угол», и в этот момент вся энергия волны отражается или преломляется в поверхность, следующую за поперечной волной или поперечной головной волной. Немного за пределами второго критического угла будут генерироваться поверхностные (Рэлеевские) волны.
На рисунке 2.12 показана связь между углом ввода луча и относительными амплитудами преломленных волн (продольной, поперечной и поверхностной) для границы раздела "оргстекло - сталь". Теперь мы наглядно можем удостовериться, что для границы раздела "оргстекло - сталь" значения первого и второго критических углов примерно равны 27˚ и 57˚. Третий критический угол в данном случае составляет примерно 33˚. Стоит отметить, что из-за преломления угол поперечной волны внутри материала полностью отличается от угла падения.
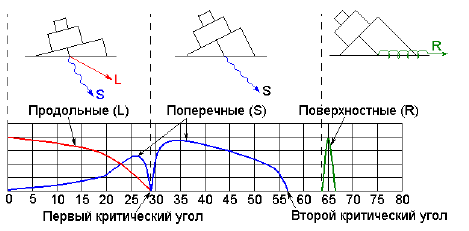
Рисунок 2.12. Связь между углом ввода луча и относительными амплитудами преломленных волн
B таблице 2.1 приведены углы, которые применимы к некоторым парам сред.  ,
,  и
и  (в градусах) — максимальные значения коэффициентов прозрачности (по энергии) при образовании продольных
(в градусах) — максимальные значения коэффициентов прозрачности (по энергии) при образовании продольных  и поперечных
и поперечных  волн, углы
волн, углы  (в градусах), при которых достигается наибольшая величина коэффициента прозрачности для поперечных волн.
(в градусах), при которых достигается наибольшая величина коэффициента прозрачности для поперечных волн.
Таблица 2.1. Параметры прохождения

Величины углов отражения и преломления плоских ультразвуковых волн подчиняются закону Снеллиуса только в том случае, если поверхность раздела сред является зеркально-плоской. Однако на практике таких поверхностей нет. Чистота их обработки определяется средним размером высоты шероховатостей. Поверхность может считаться «акустически зеркальной», если размер длины волны в несколько раз превышает уровень шероховатости. Если же размеры шероховатости соизмеримы с длиной волны, то поверхность считается «диффузной», т.е. когда отраженные и преломленные волны случайным образом рассеиваются в различных направлениях.
4. Решение задач о рассеянии плоских волн на микрошероховатой границе раздела твердых сред
4.1. Формирование граничных условий в приближении «линейного скольжения»
В работах [4-6] представлены варианты математических моделей, предусматривающие отклонения от условий «сварного контакта» на границе раздела упругих. И в работах [7-8] отражены значимые нюансы, связанные с рассеянием на шероховатых поверхностях.
Например, в работе [9] предложено использовать граничные условия в приближении «линейного скольжения», суть которых заключена в допущении непрерывности передачи упругих напряжений и наличии «разрыва» в передаче упругих смещений. Тензор второго ранга контактных жесткостей (KG), содержащий 9 независимых элементов в общем случае, определяет величину «разрыва». Тензор контактных жесткостей может быть приведен к диагональному виду, когда границы границы с аксиально-симметричными свойствами:
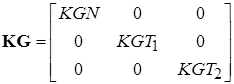 , (3.1)
, (3.1)
где  ― модуль контактной нормальной жесткости, действующий по нормали к плоскости границы;
― модуль контактной нормальной жесткости, действующий по нормали к плоскости границы;  и
и  ― модули тангенциальных контактных жесткостей, которые действуют параллельно плоскости границы во взаимно ортогональных направлениях и в общем случае неравных друг другу. В частном случае «плоской» задачи можно ограничиться рассмотрением только двух контактных жесткостей из (3.1):
― модули тангенциальных контактных жесткостей, которые действуют параллельно плоскости границы во взаимно ортогональных направлениях и в общем случае неравных друг другу. В частном случае «плоской» задачи можно ограничиться рассмотрением только двух контактных жесткостей из (3.1):  и
и  .
.
Контактная жесткость характеризует способность поверхностных слоев контактирующих тел сопротивляться действию сил, которые стремятся их деформировать. Упругие контактные перемещения складываются из деформаций микровыступов под ними, общих контактных деформаций и распрямления микроволн. Контактная жесткость зависит от неровности поверхностей, их величины, радиусов закругления выступов и формы, определяющей кривую изменения поверхности.
В работах [8,9] предложен способ определения величин контактных жесткостей с учетом параметров взаимодействующих микровыступов шероховатостей на границе раздела твердых сред. В этих работах отражено, что в случае малости высоты микровыступов по сравнению с длиной падающей упругой волны модуль нормальной контактной жесткости определяется следующей зависимостью:
 , (3.2)
, (3.2)
и по аналогии модуль тангенциальной контактной жесткости имеет вид
 , (3.3)
, (3.3)
где  и
и  ― плотность и коэффициенты Ламэ для сред, лежащих выше и ниже границы раздела, соответственно;
― плотность и коэффициенты Ламэ для сред, лежащих выше и ниже границы раздела, соответственно;  ,
,  ― круговая и линейная частоты;
― круговая и линейная частоты;  ― среднее расстояние между соседними микровыступами на контактирующих поверхностях;
― среднее расстояние между соседними микровыступами на контактирующих поверхностях;  ― коэффициент перфорации:
― коэффициент перфорации: 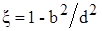 , где
, где  ― средний размер участка с отсутствием контакта. Величины
― средний размер участка с отсутствием контакта. Величины  и
и  являются параметрами модели.
являются параметрами модели.
Для того чтобы картина была более ясной и приближенной реальности в модель необходимо включить параметр шероховатости, который значительно влияет на значение контактной жесткости. Добавляя в модель параметр шероховатости границ (например  ) необходимо принять во внимание параметры формы контактирующих микровыступов (рисунок 3.1).
) необходимо принять во внимание параметры формы контактирующих микровыступов (рисунок 3.1).
Рисунок 3.1. Схема к определению параметров взаимного влияния неровностей (микроконтактов) при их взаимодействии.
Микровыступы поверхности можно имитировать сферическими формами (как показано на рисунке 2.1). В таком случае в соответствии с рекомендациями [10] величина среднего расстояния между микровыступами может быть представлена как:
 , (3.4)
, (3.4)
где  ― радиус замещающего сферического микровыступа;
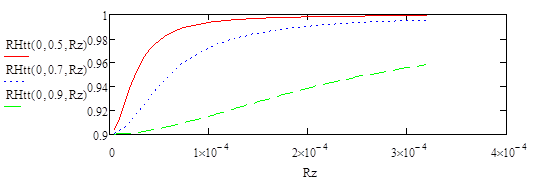
― радиус замещающего сферического микровыступа;  ― величина шероховатости [10]. Общий вид зависимости среднего расстояния между микровыступами от параметра шероховатости Rz при заданных значениях радиусов микросфер представлен на рисунке 3.2. Кроме того, можно показать, что средний радиус площади контактного пятна
― величина шероховатости [10]. Общий вид зависимости среднего расстояния между микровыступами от параметра шероховатости Rz при заданных значениях радиусов микросфер представлен на рисунке 3.2. Кроме того, можно показать, что средний радиус площади контактного пятна 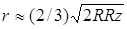 , откуда
, откуда  .
.
Подстановка (3.4) в (3.2, 3.3) дает в явном виде зависимости контактных жесткостей от параметров шероховатостей границы раздела, а их общий ход ясен из графиков на рисунке 3.2.

Рисунок 3.2. Примерный вид зависимостей среднего расстояния между микроконтактами от параметра шероховатости Rz при заданных значениях радиусов сферических микровыступов:
(–) ― R = 0,5·10-3; (---) ― R = 1,0·10-3; (– –) ― R = 1,5·10-3 м.
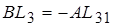
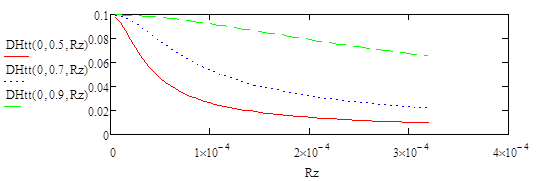
Приняв во внимание шероховатость поверхности, и учитывая форму микронеровностей при расчетах, можно построить зависимости контактных жесткостей на границе раздела двух сред. На рисунке 3.3 представлены зависимости контактных жесткостей, при заданных значениях коэффициента перфорации 0,5 и 0,7 от радиуса кривизны микронеровностей.
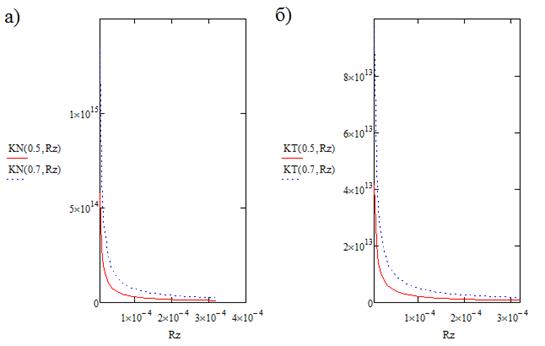
Рисунок 3.3. Зависимости KGN-нормальной контактной жесткости (а), KGT-тангенциальной контактной жесткости (б) от параметра шероховатости, при заданных значениях коэффициента перфорации ξ: (– ) ― ξ = 0,5; (---) ― ξ = 0,7; f = 1 МГц.
4.2. Продольная волна.
В случае решения задачи о рассеянии плоских упругих волн, допустимо ограничиться подробной схемой падения плоской продольной волны под наклоном, которая представлена на рис. 3. В результате падающая продольная волна распространяется на два случая, которые относятся к поперечным SV- и SH-волнам.
На рисунке 3 схематически изображено падение гармонической, плоской продольной волны смещения с единичной амплитудой и частотой w = 2pf в среде 1 на границу раздела под углом a.
Падая и отражаясь, волна трансформируется. Помимо волн под углами a1 и a2 появляются поперечные волны типа SV, которые в свою очередь распространяются под углами b1 в среде 1 и b2 в среде 2. В дальнейшем уделим внимание решению «плоской задачи», которая исключает зависимость результата от координаты z.

Рисунок 3.4. Схема преломления продольной волны на плоской границе раздела двух твердых сред.
Составляющие вектора смещения в падающей волне Ux,I и Uy,I записывались в виде (i ― мнимая единица):
 |
(3.5)
Составляющие вектора смещения в падающей волне в среде “1”:
 |
(3.6)
Составляющие вектора смещения в преломленной волне в среде “2”:
(3.7)
При записи уравнений (3.5 – 3.7) учтено, что  - искомые коэффициенты отражения и прохождения по упругим смещениям и выполнение закона Снеллиуса: a=a1, и
- искомые коэффициенты отражения и прохождения по упругим смещениям и выполнение закона Снеллиуса: a=a1, и  ,
,
 |
(3.8)
Множитель  - одинаковый у всех слагаемых, и далее во всех выражениях опускается.
- одинаковый у всех слагаемых, и далее во всех выражениях опускается.
Полное поле упругих смещений в среде “1”:
 ,
,  . (3.9)
. (3.9)
Полное поле упругих смещений в среде “2”:
 ,
,  . (3.10)
. (3.10)
Составляющие тензора упругих напряжений, которые учитываются в задаче, имеют вид:
 |
(3.11)
Граничные условия для непрерывных, упругих напряжений (y=0):
 ,
,  . (3.12)
. (3.12)
С учетом выражений (3.8-3.12) для упругих смещений при «линейном скольжении» граничные условия имели вид:
 ,
,  . (2.13)
. (2.13)
Подстановка выражений (3.5-3.11) в (3.12, 3.13) приводила к системе уравнений для четырёх искомых коэффициентов, которую удобно переписать в матричной форме:
 |
(2.14)
где:
 , ,
, , 
 ,
,  ,
,
 ,
,  ,
,
 ,
,  ,
,
 ,
,  ,
,
 ,
,  ,
,
 ,
,  ,
,

 ,
,
 ,
,  ,
,  ,
,  . (3.15)
. (3.15)
Для описания прохождения плоской, продольной волны через плоскую границу раздела двух твердых сред при неполной передаче упругих смещений, которые возникают из-за особенностей сцепления контактирующих шероховатых поверхностей неоднородности, можно воспользоваться формулами (3.14, 3.15), которые представляют собой полную систему уравнений. Для формального учета линейного скольжения при сцеплении необходимо подставить в систему (3.14, 3.15) полученные выше в явном виде выражения для элементов матрицы KG (см. форм.(3.2, 3.3) с учетом форм. (3.4)). Общий вид зависимостей контактных жесткостей от параметров модели и параметров шероховатости представлен на рисунке 3.4 (а, б).
Явным превосходством подобного подхода является возможность аналитического описания непрерывного перехода от свойств «сварного контакта» до свойств «свободной границы». Для этого, например, для большинства металлов и мегагерцовых частот достаточно учитывать диапазон контактных модулей в пределах  H/м3.
H/м3.
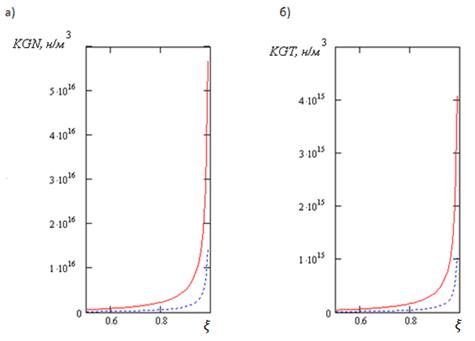
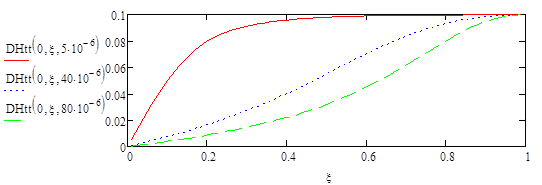
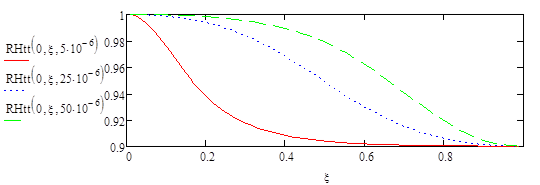
Рисунок 3.5 — Зависимости KGN-нормальной контактной жесткости – (а), KGT-тангенциальной контактной жесткости – (б) от коэффициента перфорации ξ при заданных значениях параметра шероховатости: (– )- Rz =5·10-6 м; (---) – Rz = 20·10-6 м; f = 1 МГц.
Изменение коэффициентов пропускания и отражения энергии ультразвука через границу из оргстекла, когда угол падения был увеличен, а преобразователь возбужден продольными волнами, показано на рисунке 2 а, б. Как видно из рис. 2а, энергия продольной волны, передаваемой из оргстекла в сталь, несколько уменьшалась, когда угол падения продольных волн увеличивался до первого критического угла. Однако часть энергии, преобразованная в поперечные волны, увеличивается соответственно. Когда угол падения продольных волн находился между первым и вторым критическим углом, продольные волны не передавались на сталь (рисунок 3.6,а). Вся энергия продольных волн была преобразована в поперечные волны (Ts на рисунке 3.6,а и Rs на рисунке 3.6,б). Следует отметить, что вблизи первого критического угла коэффициент передачи энергии ультразвуковых волн приближается к нулю, а коэффициент отражения становится выше единицы.
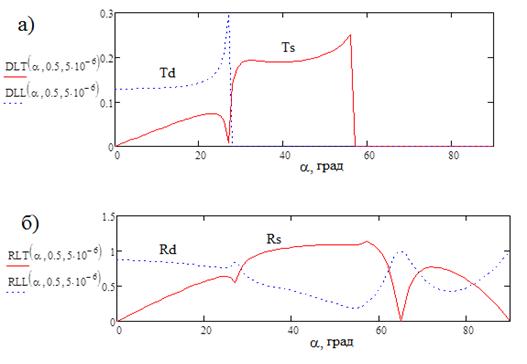
Рисунок 3.6. Зависимости коэффициентов передачи по смещению Тd, Ts (a) и коэффициентов отражения по смещению Rd, Rs (б) от угла падения для границы раздела плексиглас-сталь и продольного возбуждения
Продольные и поперечные волны, отраженные от границы между плексигласом и сталью, в действительности отражаются в призме электроакустического преобразователя. Поэтому при разработке преобразователей клинового типа необходимо оценивать типы отраженных волн. Это позволяет снизить «реверберационный» шум преобразователей и повысить точность измерений.
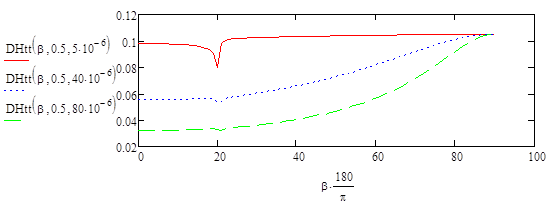
На рисунке 3.7 приведена зависимость амплитуды смещения поперечной волны от угла падения продольной волны при заданных значениях параметра шероховатости и фиксированных значениях частоты ультразвука.
Рисунок 3.7. Зависимости коэффициента прохождения поперечной волны смещения от угла падения продольной волны при заданных значениях коэффициента перфорации ξ = 0,5 и параметра шероховатости:
(– ) ― Rz = 5·10-6; (---) ― Rz = 160·10-6; (– –) ― Rz = 320·10-6 м;
f = 1 МГц.
Аналогичная зависимость по отношению к прошедшей продольной волне иллюстрируется графиком на рисунок 3.8.
Исходя из графиков, можно наблюдать тенденцию ослабления уровня информативного сигнала при увеличении шероховатости поверхности ввода. Это приводит к дополнительной коррекции соответствующих параметров контроля при использовании наклонных искателей.
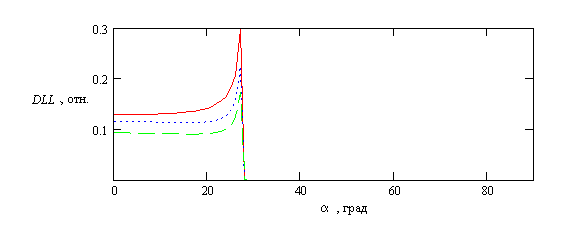
Рисунок 3.8. Зависимости коэффициента прохождения продольной волны смещения от угла падения продольной волны при заданных значениях коэффициента перфорации ξ = 0,5 и параметра шероховатости:
(– ) ― Rz = 5·10-6; (---) ― Rz = 80 · 10-6; (– –) ― Rz = 160·10-6 м; f = 1 МГц.
4.3. Поперечная SV-волна.
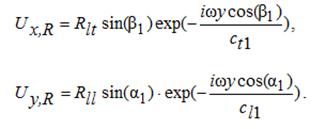
Далее нас интересовал случай падения под углом b плоской поперечной SV-волны, с поляризацией в плоскости чертежа составляющие поля упругих волн представлялись для падающих волн:
 ,
,  . (3.16)
. (3.16)
Для отраженных волн в среде “1”, учитывая b = b1,:
 ,
,
 (3.17)
(3.17)
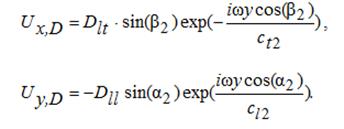
Для преломленных волн в среде “2”:


 . (3.18)
. (3.18)
Полное поле упругих смещений в среде “1”:
 ,
,  . (3.19)
. (3.19)
Полное поле упругих смещений в среде “2”:
 ,
,  . (3.20)
. (3.20)
Подстановка выражений (3.14-3.18) в граничные условия (3.11, 3.12) приводила к системе уравнений относительно неизвестных коэффициентов  , представляемой в матричной форме:
, представляемой в матричной форме:
 (3.21)
(3.21)
При записи элементов матрицы [AV] в (3.21) можно использовать элементы матрицы [AL], проведя в них замену: a® b и учитывая, что b = b1. Элементы матрицы [BV]:
 ,
,  ,
,  ,
,  . (3.22)
. (3.22)
Расчеты для случая поперечных волн, поляризованных в плоскости угла падения. Коэффициент прохождения поперечной волны от оргстекла к стали остается практически постоянным (рисунок 3.9, а), когда угол падения в оргстекле увеличивается до первого критического угла. Кроме того, две продольные волны возбуждаются. Коэффициент пропускания первой продольной волны Td и коэффициент отражения Rd второй продольной волны увеличиваются с углом падения (рисунок 3.9, а и 3.8, б соответственно). Но когда угол падения находится между первым и вторым критическими углами, особенно значительным является рост продольной волны (Rd на рисунке 3.9, б), отраженной от оргстекла.
Когда в оргстекле возбуждаются продольные или сдвиговые волны и изменяется угол падения, значительная часть ультразвуковой энергии передается стали .
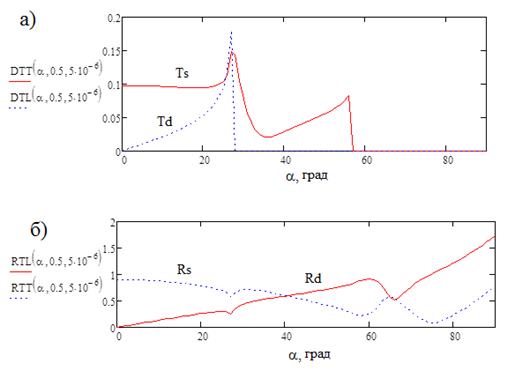
Рисунок 3.9. Зависимости коэффициентов передачи по смещению Ts, Td (a) и коэффициентов отражения по смещению Rs, Rd (b) от угла падения для границы раздела плексиглас-стекло и сдвигового возбуждения
4.4. Поперечная SH-волна.
В случае падающей под углом b поперечной SH-волны упругие смещения в обеих средах будут иметь только по одной составляющей, которые с учетом b=b1 примут вид:
 ,
,  . (3.23)
. (3.23)
Единственная отличная от нуля составляющая упругого напряжения определялась по формуле:
 , (3.24)
, (3.24)
При этом граничные условия принимали вид:
 ,
,  . (3.25)
. (3.25)
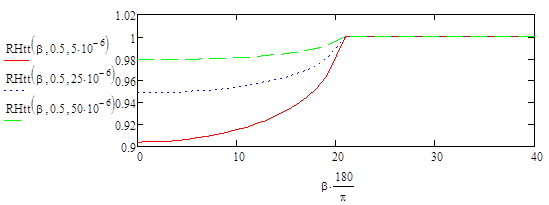
Подстановка (3.21, 3.22, 3.23) в (3.25) сразу приводила к выражениям для искомых коэффициентов  ,:
,:
 ,
,
 . (3.26)
. (3.26)
4.5.Выводы
5. ЗАКЛЮЧЕНИЕ.
6.ЛИТЕРАТУРА
1.B. Lopez. Weld Inspection with EMAT Using Guided Waves ― The e-Journal of Nondestructive Testing (May 2008) 5 p.
2.Dr. Ala Hijazi. Ultrasonic Testing. ― Soc. Amer. 36 p.
3.Joseph L. Rose. Ultrasonic Waves in Solid Media ―. Cambridge University Press, 1999, 460 p.
Дата добавления: 2019-07-15; просмотров: 5719; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!