Основные технические параметры наиболее часто применяемых микроконтроллеров
Табл. 5.1.
| Параметр | ATTiny2313 | ATMega16 ATMega103 | PIC16C926 | PIC18С452 | |||||
| микросхемы | |||||||||
| Предельная | |||||||||
| тактовая | частота, | 20 | 8 | 6 | 8 | 40 | |||
| МГц | |||||||||
| Производительность, | 20 | 8 | 6 | 2 | 10 | ||||
| MIPS | |||||||||
| Объем программного | 2 | 16 | 128 | 32 | 14 | ||||
| ПЗУ, Кб | |||||||||
| Объем ЭСППЗУ | 128 | 1К | 4К | Нет | Нет | ||||
| данных, байт | |||||||||
| Объем СОЗУ , байт | 512 | 1K | 4К | 336 | 1536 | ||||
| Разрядность АЦП | Нет | 10 | 10 | 10 | 10 | ||||
| Количество | каналов | - | 8 | 8 | 5 | 8 | |||
| для АЦП | |||||||||
| Режимы | |||||||||
| пониженного | есть | есть | есть | есть | есть | ||||
| энергопотребления | |||||||||
| Число тактов | |||||||||
| необходимое для | 1 | 1 | 1 | 4 | 4 | ||||
| выполнения одной | |||||||||
| команды (в среднем) | |||||||||
| Количество | |||||||||
| двунаправленных
| 2(0) | 4(0) | 5(1) | 5(1*) | 4(1**) | ||||
| портов | |||||||||
| (однонаправленных) | |||||||||
| TQFP, | TQFP, | TQFP, | TQFP, | ||||||
| Тип корпуса | PDIP, | PDIP, | TQFP | PDIP, | PDIP, | ||||
| PLCC | PLCC | PLCC | PLCC | ||||||
* – пятиразрядный порт подключения АЦП.
* – трехразрядный порт подключения АЦП.
Как видно из табл. 3.1, встроенным АЦП обладают все указанные в ней микроконтроллеры кроме АТTiпу2313. Поэтому при использовании АТTiпу2313 необходимо к нему подключить АЦП, а это в свою очередь заберет один из векторов внешнего прерывания. Кроме этого данный микроконтроллер оснащен всего лишь двумя портами, причем один из них семиразрядный.
Иная ситуация с микроконтроллером ATMega16, здесь уже имеется встроенный 8-канальный 10-разрядный АЦП и аналоговый компаратор и зарезервированные под них вектора прерываний. Данный микроконтроллер имеет четыре порта ввода-вывода, причем один порт используется для АЦП. Оставшихся трех портов достаточно для подключения к контроллеру остальных устройств.
|
|
|
Для микроконтроллера PIC16C926 характерно наличие пяти портов, позволяющих подключить индикатор и устройство ввода, а так же использовать один порт для управления двигателем. Один порт (5-разрядный) используется как входы АЦП для аналоговых сигналов и
опорного напряжения. Имеется так же аналоговый компаратор. Два порта остаётся не задействованными.
Микроконтроллер PIC18C452 имеет программируемую память 14 Кб, этого более чем достаточно, встроенный АЦП использует трехразрядный и восьмиразрядный порт как входы АЦП для аналоговых сигналов и опорного напряжения. Кроме этого имеется встроенный аналоговый компаратор. Поэтому для подключения индикатора и устройство ввода, а так же для управления двигателем используется четыре порта.
Микроконтроллер ATMega103 имеет почти в 64 раза больше объем программируемого ПЗУ чем у АТTiпу2313. Здесь уже имеется встроенный 8-канальный 10-разрядный АЦП и аналоговый компаратор и зарезервированные под них вектора прерываний. Встроенный АЦП использует выводы одного порта для приема аналоговых сигналов. Кроме этого в ATMega103 при преобразовании АЦП используется технология шумоподавления, как и в остальных AVR-микроконтроллерах фирмы ATMEL, которая обеспечивает надежную работу АЦП. Данный микроконтроллер имеет пять двунаправленных портов ввода-вывода, причем один порт используется для АЦП. Оставшихся четырех портов более чем достаточно для подключения к контроллеру остальных периферийных устройств.
|
|
|
Как видно из табл. 3.1., наибольшую предельную тактовую частоту имеют микроконтроллеры PIC18C452 и АТTiпу2313, однако, одна команда них выполняется за 4 и 1 такт соответственно. Поэтому необходимо сравнивать не тактовые частоты, а производительность микроконтроллеров, которая показывает частоту выполнения команд.
Сравнивая производительность микроконтроллеров можно сказать, что предельная частота выполнения команд PIC18C452 и АТTiпу2313 будет составлять 10 MIPS и 20 MIPS, а для контроллеров фирмы ATMEL она равна тактовой частоте – 6 или 8 MIPS соответственно. Р1С18С452 имеет лучшую производительность относительно ATMega16 и ATmega103, однако, из-за высокой цены Р1С18С452 и ATmega103, необходимо отказаться от их использования.
Проанализировав, вышеуказанные микроконтроллеры можно сделать вывод, что наиболее приемлемым вариантом является микроконтроллер ATMega16, так как для него не нужны дополнительные устройства и его цена достаточно низкая.
|
|
|
Ниже приведены основные характеристики и описание микроконтроллера ATMega16, на рис. 3.2. представлена его архитектура.
ATMega16 – это 8-разрядные КМОП RISC микроконтроллеры с внутрисиетемно программируемым Flash ПЗУ
Отличительные особенности:
• AVR RISC архитектура - архитектура высокой производительности и малого потребления.
• 121 команд, большинство которых выполняется за один машинный цикл
• 16 Кбайт Flash ПЗУ программ, с возможностью внутрисистемного перепрограммирования и загрузки через SPI последовательный канал, 1000 циклов стирание/запись.
• 1024 байт ЭСППЗУ данных, с возможностью внутрисистемного перепрограммирования и загрузки через SPI последовательный канал, 100000 циклов стирание/запись.
• 1024 байтов встроенного СОЗУ.
• 32 х 8 бит регистра общего назначения.
• 32 программируемые линии ввода/вывода.
• 8-канальный 10-разрядный аналого-цифровой преобразователь.
• 16-разрядный и 32-разрядный формат команд.
• Программируемый полный дуплексный UART.
Диапазон напряжений питания от 2,7 В до 6,0 В (ATMega16L) и от 4,0 В до 6,0 В (ATMega16).
• Два 8-разрядных таймера/счетчика с отдельным предделителем и режимом сравнения.
• 16-разрядный (с режимами сравнения и захвата) таймер/счетчик с отдельным предделителем.
• Три ШИМ канала.
• Внешние и внутренние источники сигналов прерывания.
• Программируемый сторожевой таймер с собственным встроенным генератором.
• Встроенные часы реального времени с собственным встроенным генератором и режимом счетчика.
• Режимы энергосбережения: пассивный (idle), экономичный (power save) и пониженного энергопотребления (power down).
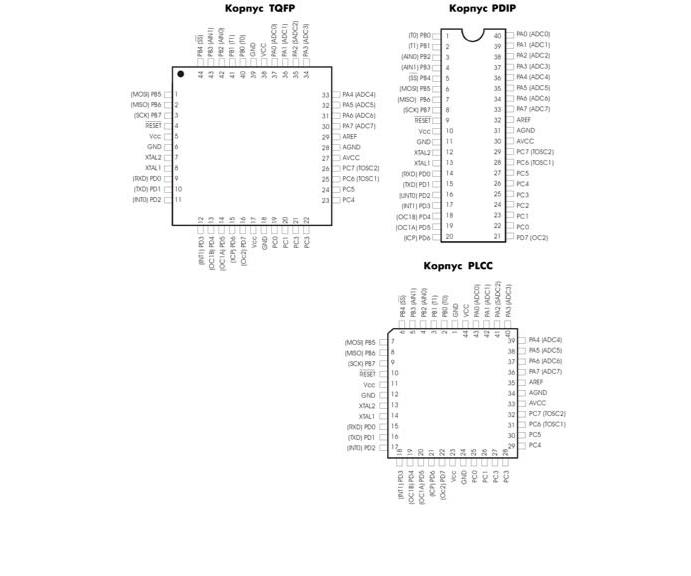
• 40-выводной корпус PDIP и 44-выводпые PLCC и TQFP (рис. 3.3).
• 40-выводной корпус PDIP и 44-выводпые PLCC и TQFP (рис.3.3).

Рис. 3.2. Архитектура микроконтроллера ATMega16
КМОП микроконтроллеры ATMega16 реализованы по AVR-RISC архитектуре (Гарвардская архитектура с раздельной памятью и раздельными шинами для памяти программ и данных). Выполняя команды за один тактовый цикл, приборы обеспечивают производительность, приближающуюся к 1 MIPS/МГц. AVR ядро объединяет мощную систему команд с 32 8-разрядными регистрами общего назначения и конвейерное обращение к памяти программ. Шесть из 32 регистров могут использоваться как три 16-разрядных регистра-указателя при косвенной адресации пространства памяти. Выполнение относительных переходов и команд вызова реализуется с прямой адресацией всего объема (16 К) адресного пространство . Адреса периферийных функций содержатся в пространстве памяти ввода/вывода. Архитектура эффективно поддерживает как языки высокого уровня, так и программы на языке ассемблер.
В пассивном режиме (idle) ЦПУ останавливается, но СОЗУ, таймеры/счетчики, порт SPI, сторожевой таймер и система прерываний остаются активными. В режиме пониженного энергопотребления (power down) останавливается тактовый генератор и, следовательно, останавливаются все функции, пока не поступит сигнал внешнего прерывания или аппаратного сброса, но сохраняется содержимое регистров. В экономичном режиме (power save), при остановленном микроконтроллере, продолжает работать генератор таймера, что обеспечивает сохранность временной базы.
Встроенная Flash помять программ и ЭСППЗУ данных могут перепрограммироваться непосредственно в системе посредством интерфейса SPI (в последовательном низковольтном режиме) или программироваться стандартными программаторами энергонезависимой памяти (в 12-вольтном параллельном режиме). Программирование микроконтроллеров ведется побайтово.
Максимальное потребление приборов в активном режиме составляет 3,0 мА и в пассивном режиме 1,2 мА (при VCC =3 В и f=8 МГц). В режиме пониженного энергопотребления, при работающем сторожевом таймере, микроконтроллер потребляет 15 мкА.
Объединение на одном кристалле усовершенствованного 8-разрядного RISC ЦПУ с загружаемым Flash ПЗУ позволило создать мощный микроконтроллер, обеспечивающий высокую гибкость и экономичность в его использовании в качестве встраиваемого МК.
Рис. 3.3. Типы корпусов микроконтроллера ATMegal6.
Выбор и расчет датчиков
Расчет датчика напряжения
1. Определим максимальное значение измеряемого напряжения Umax 1 при возможном перенапряжении в 30%:
UmaxI =  2 × U × kU = 2 × 220 × 1.3=404.47 B
2 × U × kU = 2 × 220 × 1.3=404.47 B
где kU - коэффициент перенапряжения
kU= 
Диапазон напряжений, который необходимо контролировать, составляет от 0 В до 404,47 В.
2.Выбираем в качестве датчика напряжения трансформатор напряжения, который понижает максимальное значение на первичной обмоткеUmax 1404,47Вдо
максимального значения напряжения на вторичнойобмотке, которое способен измерить АЦП, например Umax 2=UEFAR=5 B, где UEFAR – опорное напряжение для АЦП.
3.Определим коэффициент трансформации:
kТР=  =
= 
 =88.01
=88.01
4.Определим действующие значения напряжений:
– первичной обмотки
U1=  =
= 
 311.46 В
311.46 В
- вторичной обмотки
U2=  =
=  =3.54В
=3.54В
5. Определим максимально допустимый ток вторичной обмотки трансформатора при входном сопротивлении АЦП RAЦП 10 кОм :
Imax2=  =
=  =0.5×10-3A
=0.5×10-3A
6. По значениям тока и напряжения на вторичной обмотке определим полную мощность трансформатора:
Smax2=Umax2×Imax2=5×0.5×10-3=2.5×10-3Bт
7.Выбираем понижающий трансформатор серии ОСМ1-0,4 со следующими параметрами:
| Параметр | Расчетный | условие | ОСМ1-0,4 |
| U 1 , В | 286 | ≤ | 380 |
| U 2 , В | 3,54 | ≤ | 5 |
| k ТР | 80,89 | > | 76 |
| I max 2 ,мА | 0,5 | ≤ | 80000 |
| S max 2 ,мВт | 2,5 | ≤ | 400000 |
| U * 2 при U1 =286 | - | - | 3,76 |
Дата добавления: 2019-02-26; просмотров: 412; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!