Расчет момента инерции маятника
При движении груза вниз от отметки до отметки со шкива сматывается нить длиной . Учитывая, что длина окружности шкива равна и каждый оборот шкива соответствует углу радиан, найдем угол поворота шкива при движении груза вниз: радиан. (4.4) Очевидно, что при дальнейшем вращении тела до момента, когда груз остановится на отметке , оно повернется на угол радиан. Тогда общий угол поворота тела, соответствующий переходу груза от отметки до отметки , равен радиан. (4.5) Подставляя (4.2) и (4.3) в (4.1), найдем . Отсюда, используя (5), получаем формулу для оценки модуля вектора момента тормозящей силы . (4.6)
Вывод формулы для косвенных измерений момента
Инерции тела с учетом момента тормозящей силы
Рассмотрим систему тело–груз в начальный момент времени, когда груз находится на отметке  , а в качестве конечного выберем тот момент времени, когда груз опустится до нижней отметки
, а в качестве конечного выберем тот момент времени, когда груз опустится до нижней отметки  , соответствующей полной длине нити. Опять будем исходить из энергетического соотношения (4.1).
, соответствующей полной длине нити. Опять будем исходить из энергетического соотношения (4.1).
Для выбранных начального и конечного состояний получим
 , (4.7)
, (4.7)
где  – момент тормозящей силы (6);
– момент тормозящей силы (6);  – угол поворота тела, соответствующий перемещению груза от отметки до (4.4).
– угол поворота тела, соответствующий перемещению груза от отметки до (4.4).
Начальная механическая энергия системы тело-груз равна
 . (4.8)
. (4.8)
Конечная механическая энергия системы складывается из кинетической энергии вращательного движения тела и кинетической энергии поступательного движения груза в момент прохождения им отметки :
|
|
|
 , (4.9)
, (4.9)
где  – момент инерции тела;
– момент инерции тела;  – угловая скорость вращения тела в момент
– угловая скорость вращения тела в момент  (см. рис. 4.1);
(см. рис. 4.1);  – скорость поступательного движения груза в момент .
– скорость поступательного движения груза в момент .
Строго говоря, в процессе движения груз за счет упругого растяжения нити опускается чуть ниже отметки , тормозится нитью, а затем за счет упругого сжатия нити возвращается на эту отметку.
Считая движение системы равноускоренным, для скорости груза на отметке получаем
 , (4.10)
, (4.10)
где – время, за которое груз опустится от отметки до .
Угловая скорость вращения тела в тот же момент времени равна
 , (4.11)
, (4.11)
где  – радиус шкива, на который намотана нить.
– радиус шкива, на который намотана нить.
Подставляя (4.7), (4.8), (4.9) в (4.1), получаем
 .
.
Из этой формулы, учитывая (4.4), (4.10) и (4.11), выражаем момент инерции :
 , (4.12)
, (4.12)
где – момент тормозящей силы, который вычисляется по формуле (4.6).
Получение формул для определения погрешностей
Косвенных измерений момента тормозящей силы
И момента инерции тела
|
|
|
Методика получения оценок истинных значений величин и погрешностей при прямых и косвенных измерениях описана в [1]. При выполнении данной лабораторной работы прямыми будут измерения длины  и времени . Остальные величины, входящие в рабочие формулы (4.6) и (4.12), измеряются заранее и их истинные значения с указанием погрешностей приведены в таблице исходных данных, помещенной около экспериментальной установки.
и времени . Остальные величины, входящие в рабочие формулы (4.6) и (4.12), измеряются заранее и их истинные значения с указанием погрешностей приведены в таблице исходных данных, помещенной около экспериментальной установки.
Выполнив прямые многократные измерения величин  и (см. задание к работе) и проведя их статистическую обработку по методике, описанной в [1], найдите
и (см. задание к работе) и проведя их статистическую обработку по методике, описанной в [1], найдите  и
и  для выбранного значения доверительной вероятности. Эти величины будут в дальнейшем использованы для оценки истинного значения и погрешности при косвенных измерениях.
для выбранного значения доверительной вероятности. Эти величины будут в дальнейшем использованы для оценки истинного значения и погрешности при косвенных измерениях.
Подставляя в рабочую формулу (4.6) истинные значения всех аргументов, получаем оценку истинного значения момента тормозящей силы
 , (4.13)
, (4.13)
где черта над величиной означает «оценка истинного значения».
Абсолютная погрешность косвенных измерений величины  определяется формулой [1]
определяется формулой [1]
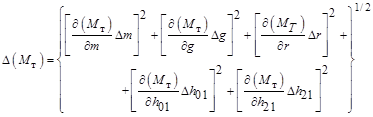
С помощью этой формулы, взяв частные производные по всем аргументам, получим
|
В формулу (4.14) входят пять квадратичных членов, вклад каждого из них в погрешность величины  неодинаков. Поэтому, чтобы упростить вычисления, прежде чем применять эту формулу, необходимо оценить вклад каждого квадратичного слагаемого и оставить в формуле только наибольшие. Эта оценка, кроме того, позволит выявить те величины, точность измерения которых определяет точность получаемого результата.
неодинаков. Поэтому, чтобы упростить вычисления, прежде чем применять эту формулу, необходимо оценить вклад каждого квадратичного слагаемого и оставить в формуле только наибольшие. Эта оценка, кроме того, позволит выявить те величины, точность измерения которых определяет точность получаемого результата.
|
|
|
Оценку истинного значения величины момента инерции тела, определяемого в опытах с помощью формулы (4.12), получим, подставив в нее истинные значения входящих аргументов:
 . (4.15)
. (4.15)
Абсолютная погрешность косвенных измерений величины  определяется формулой [1]
определяется формулой [1]
 .
.
С помощью этой формулы, взяв частные производные по всем аргументам, получим
В формулу (4.16) входит шесть квадратичных членов. Один из них (пятый) связан с погрешностью величины , которая определяется формулой (4.14). Как было сказано выше, прежде чем применять формулу (4.16), необходимо оценить вклад каждого квадратичного слагаемого, сохранив только наибольшие.
Задание к работе
1. Заготовьте таблицу для прямых пятикратных измерений длины и времени с последующей статистической обработкой полученных результатов.
|
|
|
2. Заранее выберите отметку , от которой начнется движение груза  .
.
3. Вращая тело рукой, размотайте нить на полную длину и заранее определите численное значение отметки . Обычно можно считать  . Внесите длину
. Внесите длину  в таблицу. Оцените погрешность измерения этой длины как систематическую погрешность измерительной линейки.
в таблицу. Оцените погрешность измерения этой длины как систематическую погрешность измерительной линейки.
4. Включите электронный секундомер.
5. Вращая тело рукой, намотайте нить на шкив так, чтобы груз занял положение соответствующее выбранной Вами начальной отметке .
6. Проведите первый опыт, используя в качестве груза, тянущего нить, только одну подставку массой  без подгрузков. Предварительно нажатием кнопки «Режим» установите режим
без подгрузков. Предварительно нажатием кнопки «Режим» установите режим
№ 2 (светится индикатор «Реж. 2»). Затем нажмите кнопку «Пуск». При этом отключится тормозное устройство, удерживающее тело, и одновременно включится секундомер. При включенном режиме № 2 секундомер в момент прохождения грузом отметки автоматически остановится, но тормозная система при этом не прекратит движения, позволив грузу подняться до отметки  . Дождитесь момента, когда груз поднимется до отметки , и зафиксируйте ее численное значение. Внесите результаты первого опыта в таблицу измерений (ими будут и ).
. Дождитесь момента, когда груз поднимется до отметки , и зафиксируйте ее численное значение. Внесите результаты первого опыта в таблицу измерений (ими будут и ).
7. Пятикратно повторите этот опыт, не меняя массу груза, что необходимо для определения случайной погрешности прямых измерений.
8. Проведите по одному опыту, поместив на подставку сначала один, а затем сразу два подгрузка. Результаты внесите в таблицу измерений.
9. Проведите статистическую обработку пятикратно проведенных прямых измерений величин и (п. 6,7), пользуясь методикой, изложенной в [1]. Получите оценку истинных значений и доверительных погрешностей для этих величин. Результаты вычислений внесите в таблицу.
10. Проведите оценку истинного значения момента тормозящей силы , пользуясь формулой (4.13).
11. Проведите численную оценку квадратичных членов формулы (4.14) и, отбросив малые, оцените погрешность косвенных измерений момента тормозящей силы  .
.
12. Проведите оценку истинного значения момента инерции тела , пользуясь формулой (4.15).
13. Проведите численную оценку квадратичных членов формулы (4.16) и, отбросив малые, оцените погрешность косвенных измерений момента инерции тела  .
.
14. С помощью формулы (4.6) или (4.13) проведите расчет моментов тормозящей силы для однократных опытов с другими грузами (см. п. 8). Погрешности измерений для этих опытов вычислять не надо. Обратите внимание на закономерное изменение момента тормозящей силы с ростом массы груза.
14. С помощью формулы (4.12) или (4.15) проведите расчет момента инерции тела для однократных опытов с другими грузами (см. п. 8). Погрешности измерений для этих опытов вычислять не надо. Наблюдается ли закономерное изменение момента инерции с ростом массы груза?
Контрольные вопросы
1. Какая часть системы совершает в процессе опыта поступательное, а какая – вращательное движение?
2. Почему для описания вращательного движения удобней пользоваться угловыми кинематическими характеристиками, а для поступательного – линейными?
3. Что такое момент силы? Какие силы и моменты сил действуют на тело во время его движения?
4. Какие силы создают момент тормозящей силы? Можно ли указать точку приложения этих сил?
5. Как определить работу момента силы?
6. Сохраняется ли механическая энергия системы тело–груз в процессе опыта?
7. Как можно оценить момент тормозящей силы, пользуясь энергетическими соотношениями? Какие упрощающие предположения при этом делаются?
8. Изменяется ли момент тормозящей силы при увеличении массы груза, как и почему?
9. Что такое момент инерции тела, какое свойство тела он характеризует?
10. Как найти кинетическую энергию при поступательном и при вращательном движении?
11. Как можно определить момент инерции тела, пользуясь энергетическими соотношениями?
12. Зависит ли момент инерции тела от массы груза, закрепленного на конце нити?
13. Выведите формулу кинетической энергии тела, совершающего вращательное движение вокруг неподвижной оси.
14. Выведите рабочую формулу для оценки момента тормозящей силы.
15. Выведите рабочую формулу для момента инерции тела с учетом и без учета момента тормозящей силы. Примените эти формулы, чтобы ответить на вопрос, имеет ли смысл учет момента тормозящей силы в проделанных опытах.
Индивидуальные задания для членов бригады, выполняющих
лабораторную работу на одной установке
| Номер члена бригады | Индивидуальное задание |
| 1 | Пользуясь формулой (4.6), постройте график зависимости момента тормозящей силы  от величины от величины  При расчете считайте величины При расчете считайте величины  и и  , входящие в формулу, равными , входящие в формулу, равными  , ,  . Численные значения радиуса шкива возьмите в таблице исходных данных, около лабораторной установки, на которой вам предстоит выполнять опыты. Массу . Численные значения радиуса шкива возьмите в таблице исходных данных, около лабораторной установки, на которой вам предстоит выполнять опыты. Массу  считайте равной массе подставки считайте равной массе подставки  (без подгрузков) (без подгрузков)
|
Окончание таблицы
| Номер члена бригады | Индивидуальное задание |
| 2 | Выполните задание, аналогичное заданию для первого номера, но для массы m равной сумме масс подставки и одного подгрузка: 
|
| 3 | Выполните задание, аналогичное заданию для первого номера, но для массы m, равной сумме масс подставки и двух подгрузков: 
|
Литература
1. Введение (настоящие методические указания).
2. Савельев И.В. Курс общей физики. – М.: Наука, 1982. – Т.1 (и последующие издания).
Лабораторная работа № 5
Определение момента инерции тела
методом колебаний
Цель работы – определение момента инерции маятника с применением уравнения колебаний и исследование зависимости момента инерции от расстояния до условно выбранной точки А.
Описание установки
Установка представляет собой физический маятник, т.е. твердое тело, совершающее колебания под действием силы тяжести вокруг горизонтальной оси, не проходящей через его центр масс.
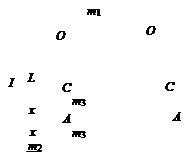
Физический маятник в данной работе состоит из барабана массой m1 с осью вращения О, стержня массой m2 и двух грузов с одинаковыми массами m3, которые можно закрепить в нужном положении на стержне (рисунок).
Расчет момента инерции маятника
Пока сила тяжести Р, приложенная в центре масс С, направлена вдоль оси стержня (а), система находится в равновесии. Если отклонить стержень на некоторый малый угол  (б), то центр масс С поднимается на небольшую высоту и тело приобретает запас потенциальной энергии. На маятник относительно оси О, направление которой выбираем «к нам», будет при этом действовать момент силы тяжести, проекция которого на эту ось равна
(б), то центр масс С поднимается на небольшую высоту и тело приобретает запас потенциальной энергии. На маятник относительно оси О, направление которой выбираем «к нам», будет при этом действовать момент силы тяжести, проекция которого на эту ось равна
 , (5.1)
, (5.1)
где  , L – расстояние между осью вращения О и центром масс С.
, L – расстояние между осью вращения О и центром масс С.

а б
Вращающий момент М, создаваемый силой Р, при малых углах  равен
равен
 .
.
Он вызывает ускорение при вращательном движении маятника. Связь между этим ускорением и моментом сил дается основным уравнением динамики вращательного движения
 , (5.2)
, (5.2)
где J – момент инерции маятника относительно оси О.
Обозначим
 . (5.3)
. (5.3)
Тогда из уравнения (5.2) получим
 . (5.4)
. (5.4)
Уравнение (5.4) описывает колебательный процесс с циклической частотой  .
.
Период колебаний, следовательно, равен
 . (5.5)
. (5.5)
Из формулы (5.5) выразим момент инерции
 . (5.6)
. (5.6)
Если положение центра масс системы не изменяется, то величина L постоянна и в формулу (5.6) можно ввести постоянный коэффициент
 (5.7)
(5.7)
Измеряя время t, в течение которого происходит n полных колебаний, найдем период  . Подставляя T и K в (5.6), получаем рабочую формулу
. Подставляя T и K в (5.6), получаем рабочую формулу
 . (5.8)
. (5.8)
С помощью формулы (5.8) производятся косвенные измерения момента инерции физического маятника относительно оси О.
С другой стороны, момент инерции J зависит от положения грузов  на стержне. Переместим грузы по стержню так, чтобы они располагались симметрично относительно некоторой точки А. Эта математическая точка выбрана произвольно вблизи середины стержня. Центр масс системы при этом сохраняет свое местоположение. Будем считать размеры грузов малыми по сравнению с
на стержне. Переместим грузы по стержню так, чтобы они располагались симметрично относительно некоторой точки А. Эта математическая точка выбрана произвольно вблизи середины стержня. Центр масс системы при этом сохраняет свое местоположение. Будем считать размеры грузов малыми по сравнению с  и
и  (см. рисунок). Тогда их можно рассматривать как материальные точки. В этом случае момент инерции системы определяется выражением
(см. рисунок). Тогда их можно рассматривать как материальные точки. В этом случае момент инерции системы определяется выражением
 , (5.9)
, (5.9)
где  – момент инерции системы без грузов; x – расстояние груза до точки А; l – расстояние точки А до оси вращения маятника О.
– момент инерции системы без грузов; x – расстояние груза до точки А; l – расстояние точки А до оси вращения маятника О.
Преобразуя формулу (5.9), получаем
 , (5.10)
, (5.10)
где  – момент инерции маятника при положении грузов в точке А.
– момент инерции маятника при положении грузов в точке А.
Зависимость (5.10) будем проверять, получая величины J и JA экспериментально с помощью формулы (5.8).
Задание к работе
1. При подготовке к лабораторной работе получите расчетную формулу для погрешности косвенных измерений DJ момента инерции (см. Введение). Учтите, что момент инерции определяется с помощью рабочей формулы (5.8). Для упрощения вычислений можно считать, что коэффициент K в этой формуле измерен точно: DK = 0.
2. Подготовьте эскиз табл. В.1 для статистической обработки прямых пятикратных измерений времени t (см. Введение).
3. Подготовьте эскиз табл. В.2 для исследования зависимости J от x2.
4. Включите электронный секундомер. Нажатием кнопки «Режим» установите режим № 3 (светится индикатор «Реж. 3»), при этом отключится тормозное устройство, удерживающее тело.
5. Приступая к работе, поместите оба груза  в точке А
в точке А
(ее положение указано в таблице исходных данных, помещенной около лабораторной установки, на которой Вам предстоит работать).
6. Отклоните маятник рукой на небольшой угол  , и в момент отпускания маятника включите секундомер нажатием кнопки «Пуск». Отсчитав 10 полных колебаний маятника, остановите секундомер нажатием кнопки «Стоп». Занесите полученное время в таблицу измерений.
, и в момент отпускания маятника включите секундомер нажатием кнопки «Пуск». Отсчитав 10 полных колебаний маятника, остановите секундомер нажатием кнопки «Стоп». Занесите полученное время в таблицу измерений.
7. Проведите пятикратные измерения времени t десяти полных колебаний физического маятника, не меняя положение грузов.
8. Рассчитайте среднее время  и определите доверительную погрешность измерения Dt.
и определите доверительную погрешность измерения Dt.
9. Используя рабочую формулу (5.8), определите значение момента инерции JA, а по формуле, полученной в п. 1 этого задания, определите погрешность измерения этой величины DJ. Результат запишите в виде  . Результат занесите в табл. В.2 для
. Результат занесите в табл. В.2 для  .
.
10 Раздвиньте грузы симметрично относительно точки А на расстояние x (см. рисунок). Проведите однократные измерения времени t десяти полных колебаний физического маятника.
11. Повторите п. 7 при пяти различных расстояниях x.
12. Определите момент инерции маятника с помощью формулы (3.8) при различных расстояниях x. Результаты занесите в табл. В.2.
13. Постройте график зависимости момента инерции маятника от x2, пользуясь табл. В.2. Нанесите на этот же график ожидаемую зависимость (5.10). Проведите сравнение и анализ полученных результатов.
Контрольные вопросы
1. Какова цель данной работы?
2. Что называется моментом инерции тела? В чем его физический смысл?
3. Сформулируйте и примените к данной работе основной закон динамики вращательного движения.
4. Что такое центр масс системы?
5. Почему местоположение центра масс маятника не меняется при изменении положения грузов ?
6. Найдите момент инерции системы относительно центра масс, задав или измерив нужные для этого величины.
7. Сформулируйте закон сохранения энергии и запишите его применительно к физическому маятнику.
8. Получите рабочую формулу (5.8) и зависимость (5.10).
9. Получите формулу для расчета погрешности косвенных измерений момента инерции.
10. Сформулируйте теорему Штейнера и примените ее к исследуемой системе.
11. Почему предлагается построить график зависимости момента инерции от квадрата величины x?
12. Что такое момент силы  , угловая скорость
, угловая скорость  , угловое ускорение
, угловое ускорение  , угловое перемещение
, угловое перемещение  , как направлены эти векторы?
, как направлены эти векторы?
Литература
Савельев И.В. Курс общей физики. – М.: Наука, 1982. – Т.1 (и последующие издания).
Лабораторная работа № 6
Определение показателя адиабаты
методом Клемана и Дезорма
Цель работы – изучение равновесных термодинамических процессов и теплоемкости идеальных газов и измерение показателя адиабаты классическим методом Клемана и Дезорма.
Дата добавления: 2019-02-12; просмотров: 527; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!