Гибридные нечеткие системы управления.
Министерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение
высшего образования
«Уфимский государственный авиационный технический университет»
Кафедра электроники и биомедицинских технологий
| % / нед | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| 100 | ||||||||||
| 90 | ||||||||||
| 80 | ||||||||||
| 70 | ||||||||||
| 60 | ||||||||||
| 50 | ||||||||||
| 40 | ||||||||||
| 30 | ||||||||||
| 20 | ||||||||||
| 10 |
    |
Пояснительная записка
К научно-исследовательской работе по теме
«Интеллектуальное управление подвижными объектами с использованием принципа робастной стабилизации сингулярных чисел в пространстве Харди»
1204.103280.000 ПЗ
| Группа ЭН-207М | Фамилия И.О. | Подпись | Дата | Оценка |
| Студент | Миргалиев А.Т. | |||
| Консультант | Ефанов В.Н. | |||
| Принял | Ефанов В.Н. |
|
|
|
Уфа 2018
СОДЕРЖАНИЕ
ВВЕДЕНИЕ. 3
Задачи НИР. 4
1 Современные концепции построения интеллектуальных систем управления, адаптированных к функционированию в реальной среде. 5
2 Системы с нечеткими регуляторами. 9
3 Гибридные нечеткие системы управления. 11
4 Адаптивные нечеткие системы.. 12
Основные результаты и выводы.. 21
СПИСОК ЛИТЕРАТУРЫ.. 22
ВВЕДЕНИЕ
К одному из первых упоминаний термина интеллектуальность в применении к системе можно отнести статью "Вычислительная машина и интеллект", которую в 1950 году опубликовал журнал "Mind" автором которой был британский математик Алан Тьюринг. В современной науке множество областей направлено на работу с интеллектуальными системами. На данном этапе развития таких систем человек стремится создать автономную интегрированную технологию взаимодействия с окружающей средой. То есть будет создана система реального мира, функции которой будут связанны между собой, образуя все новые свойства, при этом сохранится целостность системы, её жизнедеятельность и открытость.
Также одним из главных отличий таких систем, является взаимодействие с внешней средой, именно через это взаимодействие происходит постановка задачи, оценка вариантов достижения цели, разработка оптимального решения и контроль над его исполнением. Все это возможно лишь, когда система обладает достаточным знанием и способна взаимодействовать с человеком в реальном времени. Чаще всего информационно-вычислительные системы с интеллектуальной поддержкой принятия решения применяются тогда, когда логический способ обработки информации более эффективен, чем классический вычислительный.
|
|
|
Задачи НИР
· Изучить современные концепции построения интеллектуальных систем управления, адаптированных к функционированию в реальной среде;
· Рассмотреть преимущества и недостатки каждого вида интеллектуальных систем;
· Изучить структурное устройство систем управления с нечетким регулятором;
· Рассмотреть функциональные особенности гибридных нечетких систем управления.
1 Современные концепции построения интеллектуальных систем управления, адаптированных к функционированию в реальной среде.
В технологическом аспекте вычислительные части интеллектуальных систем должны уметь гибко обрабатывать информацию о реальном мире, как это делает человек, поскольку многие задачи этого мира плохо определены, и их трудно представить в виде алгоритма [1].
|
|
|
Существует множество неопределенностей, для различных систем и условий они будут различны. Можно выделить несколько основных. К ним будут относиться: параметрическая неопределенность, динамическая, нелинейная. Все эти виды неопределенности могут лечь в основу формирования характеристик внешней среды. Именно поэтому интеллектуальная система в целом, а также система, работающая с внешней средой в частности должна иметь в своем составе методы борьбы с такими неопределенностями.
Можно выделить некоторые признаки, характерные для интеллектуальных технологий. К ним относятся: развитые коммуникативные способности, умение решать сложные плохо формализуемые задачи, способность к самообучению, адаптивность. На базе этих характеристик можно составить одну из множества классификаций интеллектуальных систем. Для нас важна несколько другая классификация, которая позволяет разделить интеллектуально-информационные системы по критерию используемого метода решения поставленных задач. Такая классификация представлена на рисунке 1.1.
|
|
|
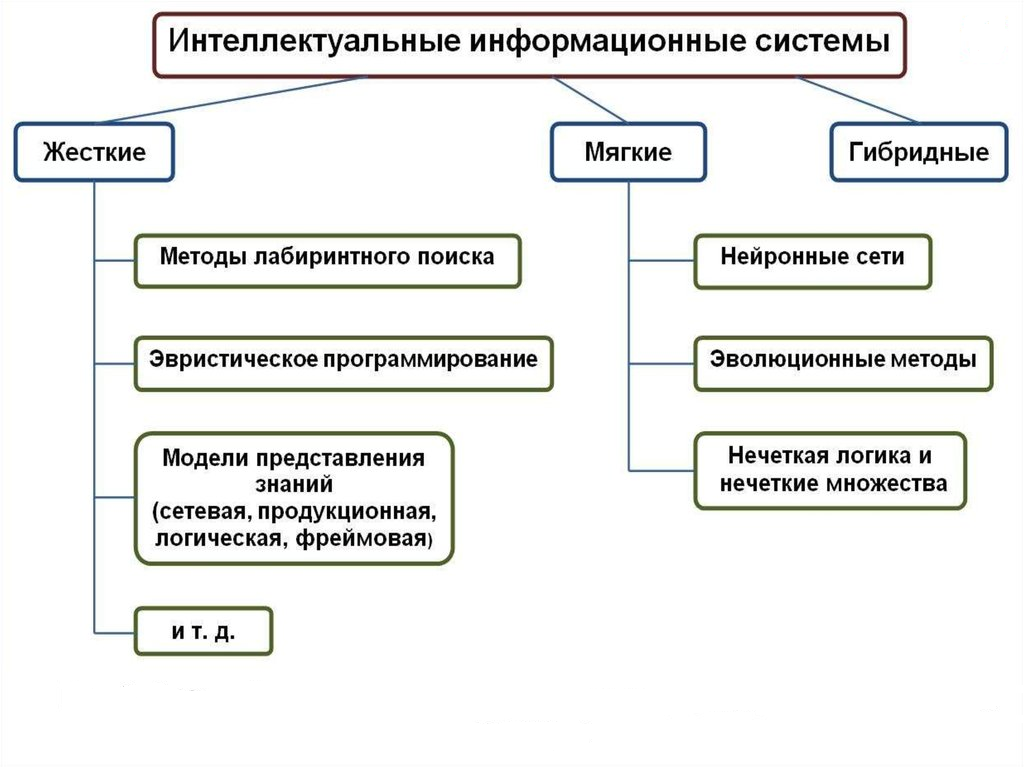
Рисунок 1.1 – Классификация интеллектуальных информационных систем по методам.
В виду того что в основе данных исследований лежит система управления, нас интересуют интеллектуальные технологии, напрямую связанные с такими системами. Именно интеллектуальные системы управления в своем функционале наиболее схожи с системами живой природы.
Можно выделить большое количество схожих свойств, к ним относятся:
− способность восприятия информации как о внутреннем состоянии функциональной системы и ее отдельных подсистем, так и о состоянии внешней среды;
− способность к саморегулированию внутри отдельных функциональных подсистем;
− способность к адаптации и самоорганизации по отношению к изменяющимся внешним условиям;
− способность к накоплению информации и обучаемости;
− способность к накоплению знаний, их структурированию и обобщению;
− способность к принятию решений к действиям на основе накопленных знаний и располагаемой информации;
− способность использования накопленных знаний и накопленной информации для генерации новых знаний;
− другие свойства.
Все выше перечисленные свойства систем живой природы достигаются при помощи особой организации систем и подсистем, архитектурой, топологией и информационными связями [2]. Такими же свойствами обладает большинство технических систем управления, которые используют для организации управления принцип отрицательной обратной связи и должны устойчиво функционировать в условиях несущественных структурно-параметрических возмущений их динамических моделей. Для таких систем характерны “мягкие” методы и технологии искусственного интеллекта, которые развиваются в трех основных направлениях: искусственные нейронные сети, эволюционное программирование и нечеткая логика.
В настоящее время искусственные нейронные сети стали применяться для определения нелинейных динамических систем, так как стратегии управления, основанные на линеаризованных системах не корректны. Линеаризованные модели не всегда отражают действительные физические свойства системы.
Математически задачу управления динамическими объектами с применением нейронных сетей можно описать следующими формулами. Пусть объект управления описывается следующей совокупностью нелинейных разностных уравнений
 , (1.1.1)
, (1.1.1)
где u(k) ‒ вектор управляющих воздействий,
у(k) ‒ вектор управляемых переменных,
n и m ‒ неотрицательные числа, характеризующие порядок разностных уравнений.
Во многих практических случаях управляющие воздействия ограничены по величине
 . (1.1.2)
. (1.1.2)
Управление должно осуществляться таким образом, чтобы управляемые переменные соответствовали желаемому закону у(k). При этом близость управляемых переменных к желаемому закону оценивается некоторым критерием. Решение этой задачи достигается за счет использования многослойных нейронных сетей.
Эволюционные методы – лучшие для решения задач непрерывной оптимизации. Идея эволюционного метода заключается в представлении гена в форме вещественных чисел, таким образом, генотип становится равен фенотипу. Применение данного метода существенно повышает точность найденного решения, а также скорость глобальной оптимизации. Самым эффективным признан оператор BLX-α скрещивание с α=0,5. Особенность данного оператора в том, что при скрещивании генов  значения потомка могут лежать в некоторой области, выходящей за границы значений этих генов на величину Δα, т.е.
значения потомка могут лежать в некоторой области, выходящей за границы значений этих генов на величину Δα, т.е.  . В других операторах скрещивания, например, в плоском или арифметическом будут генерироваться только допустимые индивиды,
. В других операторах скрещивания, например, в плоском или арифметическом будут генерироваться только допустимые индивиды,  .
.
В системах с нечеткой логикой главенствующую роль занимают системы управления с нечеткими регуляторами. Управление в таких системах мало отличается от управления человеком, однако скорость принятия решения значительно выше. Основой таких систем является база знаний, её архитектура и алгоритм работы напрямую связан с моделью представления знаний. В интеллектуальных системах управления всегда есть возможность увеличения базы знаний из-за многомерности неопределенности и непредсказуемости поведения объекта при нештатном изменении окружающей среды.
В настоящее время нечеткие системы автоматического управления, в зависимости от уровня их интеллектуальности, делятся на следующие группы.
2 Системы с нечеткими регуляторами.
К этой системе относятся замкнутые системы с обратной связью, в прямом контуре расположен нечеткий регулятор, с помощью датчиков, следящий за состоянием объекта и контролирующих его работу по средствам строгих схем, хранящихся в базе знаний. Такая система не самостоятельна, имеет минимальную степень интеллектуальности, управление осуществляется по состоянию, основу составляет база знаний, требующая постоянных обновлений. Архитектура системы управления с нечетким регулятором, реализующей управление по состоянию, представлена на рис. 1.2.
На данной схеме обобщенный объект управления состоит из непосредственно самого объекта, органов управления и датчиков слежения за его состоянием. Текущие параметры объекта проходят фаззификацию, сравниваются с желаемым состоянием, находится нужное правило в формате «ЕСЛИ «состояние объекта», ТО «воздействие на объект»» дальнейшая дефаззификация и изменение объекта до нужных параметров.

Рисунок 1.2 – Система управления с нечетким регулятором состояния объекта управления
Нечеткий регулятор па отклонению представлен на рисунке 1.3. В таком регуляторе желаемые параметры объекта вводятся при помощи задающего элемента. Система нечеткого вывода содержит базу знаний, хранящихся в виде «ЕСЛИ «отклонение от желаемых значений управляемых переменных», ТО «воздействие на объект»». В такой базе знаний представлены данные управления процессом при движении к желаемым значениям управляемых переменных объекта на основе знаний о величинах, характеризующих отклонение объекта от желаемых значений.

Рисунок 1.3 – Система управления с нечетким регулятором по отклонению
Гибридные нечеткие системы управления.
В таких системах нечеткий регулятор имеет двух уровневую иерархию. Данные поступают на верхний уровень, где происходит преобразование параметров регулятора, находящегося на нижнем уровне, по средствам схем нечетких выводов. Выходные параметры таких схем - это законы управления, реализованные на нижнем уровне. Данная система может ограниченно адаптироваться к изменению свойств объекта и самостоятельно менять законы управления при помощи правил, но не процесс поведения. Однако приспособляемость системы лежит в жестких рамках. Чаще всего в таких системах нижний уровень строится на базе классической теории управления и представляет собой ПИД-регулятор, верхний уровень интеллектуальная система.

Рисунок 1.4 – Гибридная нечеткая система управления

Рисунок 1.5 – Функции принадлежностей кортежей лингвистических переменных, определяющих нечеткое представление: а) ‒ ошибки управления, б) ‒ производной от ошибки управления
В соответствии с тем как ведет себя ошибка управления изменяются параметры ПИД-регулятора (либо увеличиваются, либо уменьшаются). Так же происходит изменение скорости переходного процесса, для обеспечения быстродействия. В таких системах эффективность работы обычных регуляторов значительно возрастает, что приводит к увеличению границ применения таких регуляторов.
Адаптивные нечеткие системы
Такие системы, как и гибридные, имеют двухуровневую структуру. На нижнем уровне происходит контроль над состоянием объекта и его коррекция на основе баз знаний схемой нечеткого вывода. Верхний уровень производит изменение баз знаний нижнего уровня также при помощи нечеткого вывода. Таким образом, получается, что верхний уровень проводит адаптацию нижнего уровня, который и являет собой блок принятия решения рисунок 1.6. Данные системы обеспечивают высокий уровень качества управления при серьезных изменениях параметров объекта управления. Нижний уровень представляет собой не что иное, как нечеткий регулятор, а верхний уровень – это нечеткий блок адаптации. Принцип работы регулятора прост, если параметры объекта управления значительно расходятся с желаемыми и база знаний нижнего уровня неспособна вернуть объект в допустимые границы, происходит активация верхнего уровня и коррекция правил нечеткого регулятора нижнего уровня.

Рисунок 1.6 – Адаптивная нечеткая система управления
Представленные примеры показывают многообразие нечетких систем управления с использованием адаптивных методик, если же к ним подключить другие методы, применяемые в интеллектуальных системах, то вариативность схем интеллектуальных систем управления возрастет в разы.
Таким образом основная масса систем управления способна устойчиво работать в условиях неопределенности параметров и структурных возмущений их динамических моделей, иначе говоря они обладают свойством робастной устойчивости. Рассмотрим робастную устойчивость при некоторых видах неопределенности.
Наиболее простой случай, когда имеется стационарная параметрическая неопределенность и система имеет вид
 (1.1.3)
(1.1.3)
где A, B, C - заданные матрицы, a Δ - произвольная стационарная матрица соответствующего размера (не обязательно квадратная), удовлетворяющая неравенству
 (1.1.4)
(1.1.4)
Квадратичная устойчивость такой системы с неопределенностью [25,51] сводится к существованию единой функции Ляпунова  c
c  такой, что для всех Δ, удовлетворяющих (1.1.4), выполняется условие
такой, что для всех Δ, удовлетворяющих (1.1.4), выполняется условие
 (1.1.5)
(1.1.5)
Также нас интересует оценка радиуса робастной устойчивости ηmax-максимального значения η, при котором система (1.1.3) с неопределенностью (1.1.4) асимптотически устойчива.
Перепишем неравенство (1.1.3) как
 (1.1.6)
(1.1.6)
или в виде
 (1.1.7)
(1.1.7)
Так как
 (1.1.8)
(1.1.8)
то придем к неравенству
 (1.1.9)
(1.1.9)
Непосредственно проверяется, что последнее неравенство эквивалентно неравенству
 (1.1.10)
(1.1.10)
для всех векторов χ и υ, удовлетворяющих неравенству
 (1.1.11)
(1.1.11)
Действительно, взяв максимум от левой части (1.1.10) по всем υ, удовлетворяющим (1.1.11), получим левую часть (1.1.9).
Таким образом, квадратичная устойчивость рассматриваемой системы с неопределенностью эквивалентна существованию X = XT > 0 такой, для которой выполняется неравенство (1.1.10) при условии, что выполнено неравенство (1.1.11).
Дата добавления: 2019-01-14; просмотров: 449; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!