Классификация систем телемеханики .
В зависимости от выполняемых функций и характера передаваемой информации телемеханические системы подразделяются на:
системы телеуправления (ТУ), которые служат для управления положением или состоянием дискретных и непрерывных объектов;
системы телесигнализации (ТС), осуществляющие получение информации о состоянии контролируемых и управляемых объектов;
системы телерегулирования (ТР), осуществляющие передачу из пункта управления управляемому объекту сигналов установки некоторых параметров, имеющих непрерывное множество состояний;
системы телеизмерения (ТИ), осуществляющие на расстоянии контроль значений различных параметров управляемых объектов;
системы передачи данных (СПД), осуществляющие обмен на расстоянии цифровой или другой информацией для использования ее в вычислительных или управляющих комплексах;
комбинированные системы, объединяющие некоторые из перечисленных систем в один комплекс (системы ТУ-ТС, ТР-ТИ, ТУ-ТС-ТИ и т.д.).
Обычно в телемеханической системе имеется один пункт управления и множество контролируемых пунктов, которые соединены в телемеханическую сеть, которая представляет собой совокупность устройств системы телемеханики и объединяющих их каналов связи. Структура сети, показанная на рис.7,а, является простейшей, ее обычно называют «соединение пункт-пункт».
Более сложнойявляетсямноготочечная структура телемеханической сети, которая имеет два и более контролируемых пункта. Наиболее распространенные структуры данного типа приведены на рисунке 5.4,б,в,г,д. В радиальной структуре (рисунке 5.7,б) пункт управления соединен с каждым из контролируемых пунктов отдельным каналом связи. Это обеспечивает независимость работы контрольных пунктов друг от друга при повреждении каналов связи. Такая структура используется на крупных станциях для телемеханического управления объектами в удаленных горловинах с помощью специальной системы станционной кодовой централизации.
|
|
|
В цепочной структуре (рис .5.7,в) множество контролируемых пунктов соединяются с пунктом управления общим каналом связи. Это обеспечивает наиболее эффективное использование канала связи, но при этом возникают проблемы при повреждениях канала связи и проблемы регламентации работы контролируемых пунктов. Цепочная структура применяется в диспетчерских централизациях. Часто при организации крупных диспетчерских центров (например, в масштабах железной дороги) применяются комбинации из радиальной и цепочной структур (рис.5.7,г). Для повышения надежности соединений в телемеханической сети применяют кольцевую структуру (рис.5.4,д), в которой канал связи образует кольцо и передача сообщений между пунктом управления и каждым из контролируемых пунктов может осуществляться по двум направлениям. Кроме того, различают системы телемеханики для управления подвижными объектами: кранами и другими подъемно-транспортными механизмами, поездами на железных дорогах, спутниками и т.д.
|
|
|

Рисунке 5.7. Структуры телемеханических сетей.
Передача сообщений между пунктом управления и контролируемыми пунктами организуется с помощью определенных правил – протоколов обмена. В системах железнодорожной телемеханики используют, в основном, четыре принципа обмена информацией и их сочетания. Спорадический принцип предполагает передачу только новой информации в момент ее возникновения (нажатие кнопки оператором, изменение состояния контролируемого объекта и т.д.). Его достоинством является минимальная загрузка каналов связи, но при этом возможна потеря информации из-за помех, сбоев и отказов аппаратуры.
При циклическом принципе осуществляется последовательное поочередное подключение к каналу связи всех контролируемых пунктов и выделение временного интервала для обмена информацией. Этот принцип требует синхронизации работы пункта управления и контролируемых пунктов. При использовании принципа «по запросу» вся текущая информация накапливается на контролируемых пунктах и передается только тогда, когда на данный контролируемый пункт поступает команда запроса из пункта управления. Принцип приоритета устанавливает неравноправие между различными контролируемыми пунктами, а также между различными сообщениями.
|
|
|
Для сравнения и оценки систем телемеханики используют следующие показатели:
информационная емкость – число объектов управления и контроля, включенных в систему телемеханики;
быстродействие системы – интервал времени с момента появления события на передающем пункте телемеханической системы до представления информации о нем на приемном пункте;
достоверность передачи информации – вероятность потери или искажения информации. С этой точки зрения телемеханические комплексы делятся на три категории
Телемеханические сигналы.
В телемеханических системах на расстояние передается информация. Материальными носителями информации являются сигналы. В качестве сигналов выступают импульсы тока в линиях связи или радиосигналы. Импульсы тока несут информацию вследствие того, что обладают различными качествами (признаками). Наиболее широко используются амплитудные, временные, частотные, фазовые, полярные импульсные качества. Рассмотрим их свойства.
|
|
|
При амплитудном признаке (рис.8,а)импульсные посылки отличаются только по амплитуде путем изменения напряжения источника питания, подключенного к линии связи. Такие посылки различаются в приемном устройстве релейными элементами с разной чувствительностью. Амплитудный признак можно использовать в любых линиях связи, но он обладает низкой помехозащищенностью, так как при возникновении помех или изменении сопротивления линии связи одна амплитуда легко трансформируется в другую. Поэтому амплитудные признаки используют в линиях небольшой протяженности, чаще всего кабельных, обладающих высокой стабильностью. Амплитудный признак используют при двух значениях амплитуды – большом А1 и малом А2, соответствующих значению символов 1 и 0 передаваемой информации.
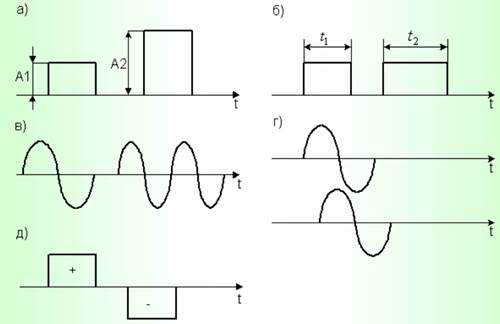
Рисунке 5.8.- Импульсные признаки сигналов.
Временной признак (рис.5.8,б) характерен тем, что импульсные посылки отличаются друг от друга длительностью. Для реализации этого признака на передающей стороне должно быть устройство, изменяющее длительность импульсов (времязадающие схемы), а на приемной – элементы, различающие посылки разной длительности. В качестве посылки может быть использована пауза между двумя импульсами одинаковой длительности. При этом изменением признака посылки будет изменение длительности паузы. Временной признак имеет невысокую помехозащищенность, так как длительность может искажаться из-за изменений временных параметров аппаратуры и линии связи. Поэтому он применяется при коротких линиях связи и, как правило, при двух временных интервалах – большом и малом, отличающихся между собой не менее чем в 3 – 4 раза.
При частотном признаке (рис.5.8,в) посылки отличаются друг от друга частотой. Частотные качества формируют частотные генераторы. На приемной стороне частоты выделяются с помощью электрических фильтров. Достоинством частотных качеств является хорошая помехозащищенность (трансформация одной частоты в другую маловероятна), простота аппаратуры (легко настроить генератор или фильтр на заданную частоту) и, поэтому возможность передачи по линиям связи большого числа посылок разной частоты. Частотный признак может использоваться как на проводных, так и на беспроводных линиях связи.
Последнее время все большее применение в системах телемеханики находит фазовый признак, при котором импульсные посылки отличаются друг от друга фазой (рис.5.8,г). Фазовые качества формируются с помощью фазосдвигающих схем, а принимаются - фазочувствительными схемами. Достоинством фазовых качеств является хорошая помехозащищенность.
Полярный признак имеет два значения, отличающиеся полярностью импульса – положительной или отрицательной. В этом случае применяют импульсы постоянного тока или полуволны выпрямленного переменного тока. Полярные качества характеризуются высокой помехозащищенностью, однако для их передачи можно использовать только проводные выделенные линии связи. Полярные посылки различаются в приемном устройстве релейными поляризованными элементами.
Виды селекции .
При телемеханическом управлении и контроле основной является задача выбора объекта управления. Селекция – это метод выбора объекта из всего множества объектов, подлежащих управлению. Виды селекции различаются видом сигнала и видом разделения сигналов.
Сигналы подразделяют на одноэлементные и многоэлементные. В одноэлементном сигнале сообщение несет один импульс тока, в многоэлементном сигнале – все импульсы тока. Например, для того, чтобы определить сообщение, которое несет трехэлементный сигнал, необходимо знать качество каждого из трех импульсов. Выделяют также линейное и временное разделение сигналов. При линейном разделении (рис.5.9,а) импульсы тока передаются одновременно каждый по своему каналу (физический провод, частотный канал и др.). При временном разделении импульсы тока передаются последовательно во времени
Сочетания указанных двух признаков дают четыре вида селекции: разделительная, качественно-комбинационная, распределительная и кодовая. Виды селекции характеризуются информационной емкостью N и временем передачи сообщения (быстродействием) Т. Свойства селекции тем лучше, чем больше
Содержание отчета
Отчет по лабораторной работе должен содержать разделы.
1. Тема и цель лабораторной работы
2. Внимательно изучите теоретический материал
3. Дайте Основные понятия и определения автоматики и телемеханики
4. Изобразите Структурные схемы АСУ, телемеханической системы, местной и дистанционной передачи данных
5. Ответьте на контрольные вопросы.
Контрольные вопросы:
1. Проклассифицируйте системы телемеханики
2. Опишите принцип действия системы автоматического управления
3. Перечислите способы управления удаленными объектами и охарактеризуйте каждый из них.
4. Охарактеризуйте телемеханические сигналы.
5. Дайте понятие селекции
Дата добавления: 2019-01-14; просмотров: 1083; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!