Структурные схемы асинхронного тягового электропривода
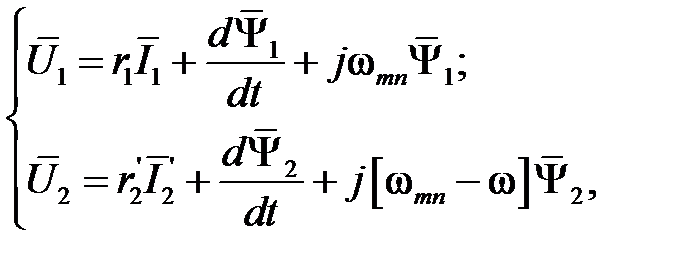
Уравнения обобщенных векторов, описывающие электромагнитные процессы в АТП в произвольной системе координат с угловой частотой вращения  имеют следующий вид:
имеют следующий вид:
| (9) (10) |
Потокосцепления статора и ротора с учетом всех токов АТД и независимо от выбранной системы координат можно представить выражениями:
 ; ;
| (11) |
 . .
| (12) |
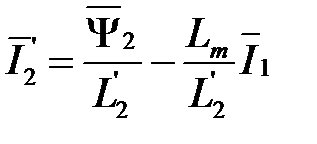
В уравнении для потокосцепления ротора (10) входит ток ротора  , который с учетом выражения для потокосцепления ротора (12), можно представить для ненасыщенной магнитной системы асинхронного электродвигателя в следующем виде:
, который с учетом выражения для потокосцепления ротора (12), можно представить для ненасыщенной магнитной системы асинхронного электродвигателя в следующем виде:
 . .
| (13) |
Учитывая, что рассматривается асинхронный электродвигатель с короткозамкнутым ротором, т.е.  , и, подставляя в уравнение (10) ток ротора
, и, подставляя в уравнение (10) ток ротора  из (11), получено следующее выражение:
из (11), получено следующее выражение:
 . .
| (14) |
Уравнение (14) в проекциях на оси неподвижной системы координат  принимает следующий вид:
принимает следующий вид:
| (15) |
Здесь  ,
,  ;
;  ,
,  - проекции векторов тока статора и потокосцепления ротора на ортогональные оси
- проекции векторов тока статора и потокосцепления ротора на ортогональные оси  и
и  неподвижной системы координат.
неподвижной системы координат.
Система уравнений (15) в операторной форме имеет следующий вид:
| (16) |
или:
| (17) |
Электромагнитный момент на валу АТД может быть найден через проекции тока статора и потокосцепления ротора на оси  и
и  с использованием алгебраического преобразования векторных величин в комплексной форме:
с использованием алгебраического преобразования векторных величин в комплексной форме:
 . .
| (18) |
Используя правило произведения векторов в комплексной форме, получено операторное выражение электромагнитного момента:
 . .
| (19) |
Электромагнитный момент, асинхронного тягового электропривода в динамических режимах уравновешивается моментом сил сопротивления движению и моментом сил инерции вращающихся частей и поступательно движущейся массы подвижного состава:
 , ,
| (20) |
где  - момент сил сопротивления движения
- момент сил сопротивления движения  , приведенных к валу тягового электродвигателя;
, приведенных к валу тягового электродвигателя;
 - суммарный момент инерции колесно-моторного блока и массы состава, приведенной к валу тягового электродвигателя.
- суммарный момент инерции колесно-моторного блока и массы состава, приведенной к валу тягового электродвигателя.
Преобразованное уравнение равновесия моментов (20) в имеет следующий вид операторной форме:
 . .
| (21) |
В соответствии с рисунком 3 угол поворота вектора тока статора  в неподвижной системе координат
в неподвижной системе координат  :
:
 , ,
| (22) |
здесь  - угол поворота вектора потокосцепления ротора
- угол поворота вектора потокосцепления ротора  в вращающейся системе координат
в вращающейся системе координат  ,
,
угол поворота ротора  в системе координат
в системе координат  :
:
 , ,
| (23) |
 - угол между векторами и
- угол между векторами и  (угол нагрузки).
(угол нагрузки).
Рисунок 3
Угловая частота тока ротора  в операторной форме определяется отношением операторов мнимой части произведения модуля вектора потокосцепления ротора
в операторной форме определяется отношением операторов мнимой части произведения модуля вектора потокосцепления ротора  и вектора тока статора
и вектора тока статора  к произведению модулей этих векторов, выраженных через их проекции
к произведению модулей этих векторов, выраженных через их проекции  ,
,  , и
, и  ,
,  на оси и :
на оси и :
 . .
| (24) |
Угол нагрузки  определяется через проекции векторов потокосцепления ротора
определяется через проекции векторов потокосцепления ротора  и тока статора
и тока статора  на оси
на оси  следующим выражением:
следующим выражением:
 . .
| (25) |
Модуль вектора потокосцепления ротора:
 . .
| (26) |
Структурная схема асинхронного тягового электропривода в неподвижной системе координат  , составленная на основании уравнений (16), (19)-(26) показана на рисунке 4.
, составленная на основании уравнений (16), (19)-(26) показана на рисунке 4.
Входными величинами для структурной схемы являются проекции обобщенного вектора тока статора  ,
,  на ортогональные оси неподвижной системы координат и момент сопротивления вращению ротора
на ортогональные оси неподвижной системы координат и момент сопротивления вращению ротора  . Структурная схема асинхронного тягового электропривода содержит блоки формирования проекций вектора потокосцепления ротора
. Структурная схема асинхронного тягового электропривода содержит блоки формирования проекций вектора потокосцепления ротора  ,
,  , блоки вычисления модуля вектора потокосцепления ротора
, блоки вычисления модуля вектора потокосцепления ротора  , электромагнитного момента электродвигателя
, электромагнитного момента электродвигателя  , а также блоки вычисления угла нагрузки
, а также блоки вычисления угла нагрузки  и угловой частоты тока ротора
и угловой частоты тока ротора  . Перекрестные обратные связи структурной схемы существенно усложняют математическую модель. Кроме того, приведенная на рисунке 4 структурная схема отображает процессы, происходящие в электрической машине переменного тока, в которой действуют трехфазные переменные величины синусоидальной формы, представленные обобщенными пространственными векторами, с гармоническими функциями их изменения. Такая математическая модель является малопригодной для системы векторного управления асинхронным тяговым электроприводом.
. Перекрестные обратные связи структурной схемы существенно усложняют математическую модель. Кроме того, приведенная на рисунке 4 структурная схема отображает процессы, происходящие в электрической машине переменного тока, в которой действуют трехфазные переменные величины синусоидальной формы, представленные обобщенными пространственными векторами, с гармоническими функциями их изменения. Такая математическая модель является малопригодной для системы векторного управления асинхронным тяговым электроприводом.
Рисунок 4
При описании перечисленных ранее переменных обобщенными пространственными векторами, вращающимися вместе с вращающейся системой координат все переменные и входящие воздействия, формирующие электромагнитный момент, представляют собой постоянные величины. Эти величины являются неизменными в установившихся режимах и претерпевают изменения при возникновении переходных процессов.
Если принять систему координат  вращающейся с угловой скоростью
вращающейся с угловой скоростью  вектора основного потокосцепления
вектора основного потокосцепления  , и сориентировать ее таким образом, чтобы действительная ось
, и сориентировать ее таким образом, чтобы действительная ось  совпадала с вектором
совпадала с вектором  , т.е. и вектор
, т.е. и вектор  и его проекция будут равны
и его проекция будут равны  ,
,  , то в этом случае математическая модель асинхронного тягового электродвигателя обладает наибольшей простотой. Взаимное расположение векторов потокосцепления ротора
, то в этом случае математическая модель асинхронного тягового электродвигателя обладает наибольшей простотой. Взаимное расположение векторов потокосцепления ротора  и тока статора показано на рисунке 3.
и тока статора показано на рисунке 3.
Уравнение (14) в проекциях на оси выбранной системы координат  принимает вид:
принимает вид:
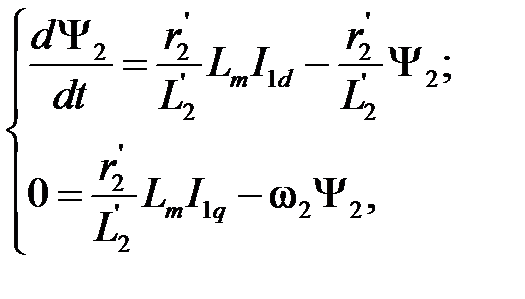
| (27) (28) |
где  - угловая скорость вращения вектора потокосцепления ротора
- угловая скорость вращения вектора потокосцепления ротора  во вращающейся системе координат ;
во вращающейся системе координат ;  ;
;
- модуль вектора потокосцепления ротора;
 ,
,  -проекции вектора тока статора на ортогональные оси системы координат .
-проекции вектора тока статора на ортогональные оси системы координат .
При переходе к операторной форме записи уравнения (27), (28) принимают следующий вид:
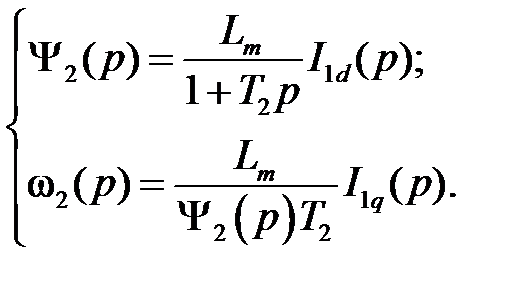
| (29) (30) |
Электромагнитный момент асинхронного электродвигателя при переходе к системе координат будет определятся произведением модуля обобщенного вектора потокосцепления ротора и проекции вектора тока статора на квадратурную ось  :
:
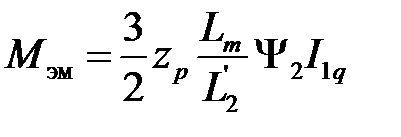 . .
| (31) |
В операторной форме записи выражение электромагнитного момента (31) имеет вид:
 . .
| (32) |
При совмещении оси  с вектором системы координат , связанной с ротором, и
с вектором системы координат , связанной с ротором, и  , связанная с потокосцеплением ротора, оси
, связанная с потокосцеплением ротора, оси  и
и  совпадают, следовательно, угол поворота системы координат
совпадают, следовательно, угол поворота системы координат  относительно ротора будет
относительно ротора будет  .
.
Угол нагрузки  в этом случае определяется отношением проекций вектора тока статора на оси
в этом случае определяется отношением проекций вектора тока статора на оси  и :
и :
 . .
| (33) |
В соответствии с уравнениями (21), (27) - (33), описывающими динамические процессы в асинхронном тяговом электроприводе в системе координат  , составлена структурная схема АТД, показанная на рисунок 5.
, составлена структурная схема АТД, показанная на рисунок 5.
Рисунок 5
Из представленной структурной схемы асинхронного электродвигателя (рисунок 5) видно, что установившееся значение потокосцепления ротора однозначно определяется составляющей тока статора по прямой оси  . В переходном режиме замедление изменения потокосцепления ротора по отношению к составляющей тока статора характеризуется достаточно большой постоянной времени цепи ротора
. В переходном режиме замедление изменения потокосцепления ротора по отношению к составляющей тока статора характеризуется достаточно большой постоянной времени цепи ротора  . Электромагнитный момент асинхронного электродвигателя при медленном изменении потокосцеплении ротора будет определятся только значением составляющей тока статора по квадратурной оси
. Электромагнитный момент асинхронного электродвигателя при медленном изменении потокосцеплении ротора будет определятся только значением составляющей тока статора по квадратурной оси  и следовать за ее изменениями, т.е. электромагнитный момент будет изменяться так быстро, как быстро будет изменяться составляющая тока статора по квадратурной оси . Это обстоятельство способствует обеспечению высокого быстродействия системы управления асинхронным тяговым электроприводом.
и следовать за ее изменениями, т.е. электромагнитный момент будет изменяться так быстро, как быстро будет изменяться составляющая тока статора по квадратурной оси . Это обстоятельство способствует обеспечению высокого быстродействия системы управления асинхронным тяговым электроприводом.
ЗАКЛЮЧЕНИЕ
В процессе прохождения производственной практики были рассмотрены принципы векторного управления асинхронным электроприводом. Управление приводом осуществляется системой автоматического управления по двум независимым контурам, путем контроля токов статора по двум взаимно перпендикулярным осям в неподвижной относительно статора системе координат.
Дата добавления: 2018-08-06; просмотров: 428; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!