Измерительный преобразователь (преобразовательный элемент), являющийся первым в цепи последовательно соединенных преобразователей, называется первичным.
Государственное профессиональное
Образовательное учреждение
«Енакиевский металлургический техникум»
ПМ 01. МДК. 01.02 Методы осуществления стандартных и сертификационных испытаний, метрологических поверок средств измерений
Раздел 2. Технологические измерения параметров процесса
Тема 1 Государственная система промышленных приборов и средств автоматизации
Тема 1.2
Лекция 19
Общие свойства и классификация измерительных преобразователей. Электромагнитные и тепловые измерительные преобразователи»
План.
Общие свойства измерительных преобразователей.
Классификация измерительных преобразователей.
Электромагнитные измерительные преобразователи.
Тепловые измерительные преобразователи.
5. Контрольные вопросы.
6. Вопросы для самостоятельного изучения.
7. Литература. Информационные ресурсы.
Преподаватель ____________________ Г.В. Лунина
Количественная информация о свойствах физических объектов (информация о значениях физических величин), получаемая в результате измерений, называется измерительной информацией. Особенность измерительной информации вытекает из общего определения понятия измерения, как нахождения значения физической величины опытным путем, с помощью предназначенных для этого технических средств.
В общем случае под сигналом подразумевают материальный носитель информации, а измерительным называют сигнал, несущий информацию о значении измеряемой величины. Входной измерительный сигнал, т. е. сигнал, воздействующий на вход средства измерений, является в большинстве случаев некоторым физическим процессом, параметры которого являются той или иной функцией времени. Измеряемая величина — это определенный параметр этого процесса. Поэтому не следует отождествлять понятие измерительный сигнал и понятие измеряемая величина. Физический процесс может обладать многими параметрами, но в каждом конкретном случае нас интересует определенный параметр этого процесса, какая-то одна физическая величина. В общем случае измерительный сигнал не является измеряемой величиной, а несет лишь информацию об измеряемой величине. Если, например, при измерении частоты входным сигналом измерительного устройства является переменный электрический ток, то измеряемой величиной является, естественно, частота, информация о которой заложена во входном сигнале.
Информативным параметром входного сигнала называется тот параметр процесса, который является измеряемым (измеряемой величиной) либо функционально связан с измеряемой величиной.
Неинформативным параметром называется параметр входного сигнала, который функционально не связан с измеряемой величиной.
Однако такой параметр может оказывать воздействие на измерительное средство и быть источником погрешности.
Выходным сигналом называется сигнал, возникающий на выходе средства измерений. Выходным сигналом является также некоторый физический процесс, который в общем случае может обладать многими параметрами, как информативным так и неинформативными.
Измерительное преобразование — это преобразование входного измерительного сигнала в функционально связанный с ним выходной сигнал.
Физической основой измерительного преобразования является преобразование и передача энергии, в частности преобразование одного вида энергии в другой.
Измерительный преобразователь (ИП) — это средство измерений, предназначенное для преобразования входного измерительного сигнала (измеряемой величины) в выходной сигнал, более удобный для дальнейшего преобразования, передачи, обработки вычислительными устройствами или хранения, но непригодный для непосредственного восприятия наблюдателем. В отличие от измерительного преобразователя измерительный прибор является средством измерений, вырабатывающим выходной сигнал в форме позволяющей наблюдателю непосредственно воспринять значение измеряемой физической величины.
В общем случае ИП, как и любое другое средство измерений, может состоять из нескольких преобразовательных элементов, в каждом из которых происходит одно из последовательных преобразований измерительного сигнала. Совокупность преобразовательных элементов средства измерений, обеспечивающая осуществление всех преобразований измерительного сигнала, составляет измерительную цепь средства измерений. Часть первого в измерительной цепи преобразовательного элемента, на которую непосредственно воздействует измеряемая величина, называется чувствительным элементом (иногда применяют название – сенсор).
Различие между измерительным преобразователем и преобразовательным элементом заключается в следующем. Измерительный преобразователь как средство измерений имеет нормированные метрологические характеристики и выполняется обычно в виде отдельного независимого устройства определенного класса точности. Это, например, измерительные трансформаторы, внешние шунты и добавочные сопротивления, термоэлектрические или терморезистивные измерительные преобразователи температуры
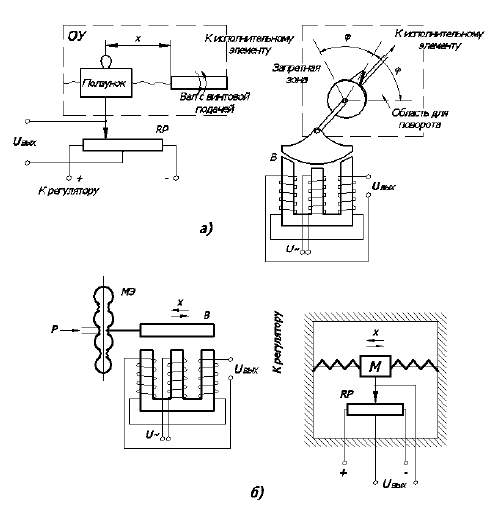
Рисунок 1. Измерительные преобразователи.
Преобразовательный элемент не имеет отдельно нормированных метрологических характеристик, однако его погрешности лимитируются погрешностями тех измерительных преобразователей или приборов, в состав которых он входит. Измерительный трансформатор, являющийся неотъемлемой частью прибора, внутренний шунт или внутреннее добавочное сопротивление являются преобразовательными элементами.
Измерительный преобразователь (преобразовательный элемент), являющийся первым в цепи последовательно соединенных преобразователей, называется первичным.
2. Перейдем к классификации измерительных преобразователей.
Основные классификации измерительных преобразователей (датчиков) представлены на рисунке 2.
По видам входных и выходных величин ИП можно разделить на преобразователи:
1. Электрических величин в электрические, например, непрерывных во времени, т.е. аналоговых сигналов в прерывистые (дискретные или цифровые) электрические сигналы.
2. Неэлектрических величин в неэлектрические, например, диафрагма с точно известным по площади отверстием, «вырезающая» из падающего на нее светового потока строго определенную его часть.
3. Электрических величин в неэлектрические, например, когда необходимо получить нормированную оптическую величину в виде светового потока или освещенности, т.е. его части, приходящейся на единичную поверхность, на вход ИП подают заранее известную мощность постоянного электрического тока.
4. Неэлектрических величин в электрические – это большая часть всех измерительных преобразователей (датчиков).
Последнюю группу по виду выходной величины и необходимости внешнего источника питания принято подразделять на два класса:
1. Параметрические.
2. Генераторные.
В основе построения датчиков параметрического типа лежит свойство изменения некоторого параметра датчика при изменении его входной величины, вследствие чего выходная величина меняется. При этом выходная величина является пассивной (сопротивление, индуктивность, емкость, электрическая или магнитная проницаемость), то есть для ее обнаружения необходимо использовать источник энергии, Генераторные датчики производят непосредственное преобразование механической энергии в энергию электрического или иного сигнала управления, то есть являются активными (напряжение, заряд, ток, ЭДС) и внешний источник энегии для обнаружения выходного сигнала в них не требуется.
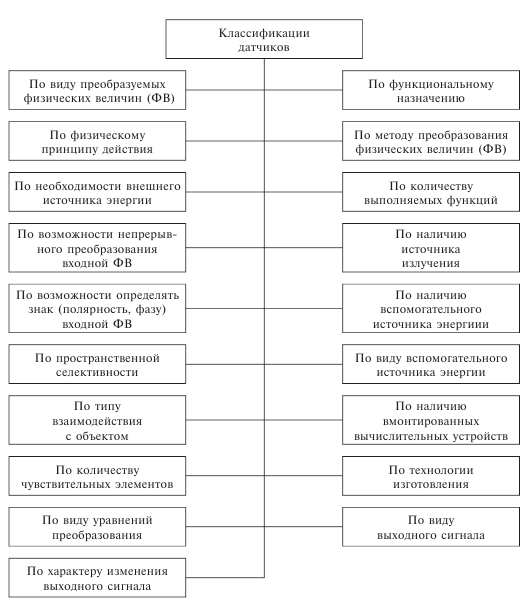
Рисунок 2. Виды классификаций датчиков.
По виду измеряемой (преобразуемой) величины различают датчики положения, скорости, ускорения, давления, температуры и других физических величин, являющихся технологическими параметрами, управление которыми необходимо осуществлять при автоматизации производственно-технологических процессов или объектов.
По физическому принципу действия различают: резистивные, электромагнитные, магнитные, электрохимические, оптоэлектрические, электростатические, гальваномагнитные, тепловые, пьезоэлектрические, спектрометрические (волновые) и комбинированные.
На рисунке 3 приведена классификация ИП по виду измеряемых величин (электрических и неэлектрических).
Вспомогательные источники энергии в датчике могут быть электрическими, гидравлическими, пневматическими, механическими, оптическими и т.д. Таких источников в одном датчике может быть несколько.
По функциональному назначению датчики (преобразователи) можно разделить на:
1. индикаторные (метрологические характеристики не нормируются). Датчик выдает информацию о наличии или отсутствии физической величины;
2. измерительные (метрологические характеристики нормируются);
3. комбинированные.
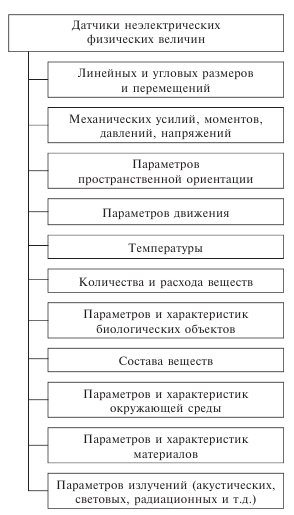

Рисунок 3. Классификация ИП по виду измеряемых величин.
По методу преобразования физической величины датчики (преобразователи) делятся на:
1. датчики (преобразователи) прямого одно- или многоступенчатого преобразования, в которых измеряемая физическая величина преобразуется в другую физическую величину — выходной сигнал датчика;
2. датчики (преобразователи) непрямого преобразования, в которых измеряемая физическая величина преобразуется в промежуточную физическую величину, а уже затем эта величина преобразуется в выходной сигнал датчика;
3. датчики комбинированного типа.
По характеру преобразования значений физической величины датчики делят на две группы:
1. датчики непрерывного действия;
2. датчики дискретного (циклического) действия.
По типу взаимодействия с объектом и количеству элементов датчики могут быть:
1. стационарными или подвижными;
2. контактными или бесконтактными;
3. пространственно-распределенными (непрерывными, дискретными или многоэлементными);
4. сосредоточенными (одноэлементными).
По пространственной селективности датчики делят на две группы:
— датчики направленного действия;
— датчики ненаправленного действия.
По наличию источника излучения датчики делятся на те, в которых такой источник есть (например, ионизационный датчик газоанализатора), и на те, в которых источников излучения нет.
Все большее распространение получают преобразователи с вмонтированными электронными и вычислительными устройствами, которые производят предварительную обработку выходного сигнала датчика. Такая обработка может включать корректировку погрешностей датчика в зависимости от влияющих факторов и т.д.
По виду уравнения преобразования датчики бывают с линейной и нелинейной зависимостью выходного сигнала от измеряемой физической величины.
По технологии изготовления датчики могут быть изготовлены с использованием объемного, печатного монтажа, гибридной и полупроводниковой технологии, микро- и нанотехнологий.
По способности различать изменение фазы или полярности входной физической величины датчики делят на фазочувствительные (реверсивные) и нефазочувствительные (нереверсивные), у которых выходной сигнал не зависит от полярности входной величины.
По характеру изменения выходного сигнала датчики делят на три группы:
— датчики с аналоговым выходным сигналом, который непрерывно изменяется;
— датчики с дискретным (например, импульсно изменяющимся) выходным сигналом.
Методы преобразования физических величин делятся на методы непосредственного преобразования, дифференциальный, замещения и нулевой
Все методы преобразования делятся также на методы непосредственного преобразования и методы уравновешивающего преобразования. Метод уравновешивающего преобразования осуществляется в условиях, когда есть две цепи — прямого преобразования и обратной связи.
По характеру выполняемых в датчиках (преобразователях) информационных преобразований и способу получения выходных сигналов датчики можно разделить на несколько групп (рис. 4).
По характеру адаптации к особенностям преобразования физических величин датчики делятся на адаптивные и неадаптивные, которые, в свою очередь, могут быть одно- и многофункциональные.
По виду выходной информации датчики (преобразователи) могут быть аналоговыми, дискретными (цифровыми) и аналого-цифровыми, при этом в датчиках могут осуществляться принципы сравнения или уравновешивания.
Преобразователи, выполненные с использованием принципа сравнения, могут быть непрерывного или циклического действия.
Преобразователи, выполненные с использованием принципа уравновешивания, могут быть следящими или развертывающего действия.
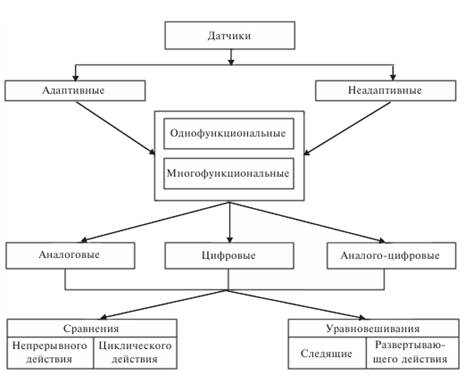
Рисунок 4. Классификация датчиков по способу получения выходных сигналов и по характеру выполняемых в них информационных преобразований
К датчикам предъявляются следующие требования:
· высокая динамическая точность, состоящая в том, что формирования сигнала должно производиться с минимальным искажением;
· высокая статическая точность работы;
· высокая надежность при работе в условиях, определяемых производственно-технологическими и техническими требованиями;
· допустимые габариты и масса;
· достаточно высокий коэффициент преобразования, обеспечивающий реагирование датчика на относительно небольшие расстояния между требуемым и действительным значениями управляемой величины;
· достаточно высокая мощность выходного сигнала.
В соответствии с приведенными требованиями при изучении датчиков различных типов необходимо уделить внимание следующим вопросам:
· статической характеристике датчика и ее виду;
· чувствительности датчика, или коэффициенту преобразования;
· разрешающей способности;
· шумам, генерируемым датчиком;
· наибольшей мощности выходного сигнала;
· мощности входного сигнала датчика;
· динамическим характеристикам.
3. Электромагнитные преобразователи, применяемые в приборах для технологических измерений (индуктивные, трансформаторные, магнитоупругие и индукционные преобразователи), очень разнообразны, но все они преобразуют входные физические величины (чаще всего угловое или линейное перемещение или усилие) в выходные электрические сигналы с использование изменений магнитных характеристик преобразователей под влиянием преобразуемых физических величин.
Достоинствами электромагнитных преобразователей можно считать простоту, дешевизну и надежность конструкции; высокую чувствительность; небольшой вес и габариты, особенно при питании напряжением высокой частоты; возможность снятия выходного сигнала без скользящих контактов; надежность работы как в диапазоне малых, так и в диапазоне больших перемещений; возможность получения высокой мощности выходного сигнала; более высокий коэффициент полезного действия по сравнению с потенциометрическими преобразователями.
Электромагнитным преобразователям присущи такие недостатки: ограниченность диапазона статической характеристики; зависимость коэффициента преобразования от внешних магнитных полей и частоты напряжения питания; возможность работы только на переменном токе; необходимость в экранировании обмоток.
Индуктивные преобразователи. Они используют зависимость индуктивности (трансформаторные – взаимной индуктивности) обмоток преобразователя от положения, геометрического размера и магнитного состояния элементов их магнитного поля, связанных с преобразуемыми физическими величинами
Напряжение индукции, обусловленное изменением тока  в той же цепи, определяют по формуле
в той же цепи, определяют по формуле  или
или  , если ток изменяется неравномерно. Коэффициент пропорциональности L в этих формулах называют индуктивностью или коэффициентом самоиндукции. Его значение зависит только от конфигурации магнитной цепи и материала, размещенного в магнитном поле.
, если ток изменяется неравномерно. Коэффициент пропорциональности L в этих формулах называют индуктивностью или коэффициентом самоиндукции. Его значение зависит только от конфигурации магнитной цепи и материала, размещенного в магнитном поле.
Схема подключения индуктивного преобразователя изображена на рис. 5, а некоторые типы преобразователей этого вида – на рис. 6.

Рис. 5. Схема подключения индуктивного преобразователя
Индуктивные преобразователи с переменной длиной магнитного зазора 5 (рис. 6, а) характеризуются нелинейной зависимостью. Рабочее перемещение - 0,01... 10 мм.
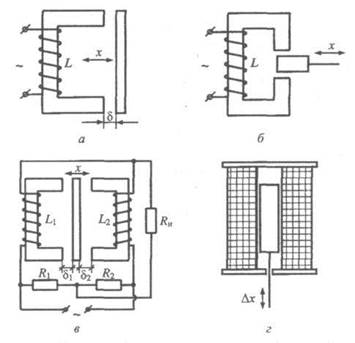
Рис. 6. Схемы индуктивных преобразователей
Индуктивные преобразователи с переменной площадью воздушного зазора (рис. 6, б) позволяют измерять перемещения до 15 … 20 мм. Перемещение сердечника (якоря) индуктивного преобразователя плунжерного типа разомкнутой магнитной цепью (рис. 6, г) изменяет индуктивность катушки. Рабочее перемещение от нескольких миллиметров до 100 мм.
В дифференциальных магнитных преобразователях (рис. 6, в) перемещение подвижного элемента приводит к увеличению индуктивности L1 одной обмотки и уменьшению индуктивности L2 второй обмотки. Это обуславливает увеличение выходного сигнала, что повышает чувствительность преобразователей и уменьшает нелинейность рабочей характеристики.
Взаимоиндуктивные (трансформаторные) преобразователи. В трансформаторном преобразователе, изображенном на рис. 5, а, изменение воздушного зазора  обуславливает изменение магнитного сопротивления и взаимной индуктивности М12 обмоток w1 иw2, а значит, и амплитуды переменного напряжения на выходе.
обуславливает изменение магнитного сопротивления и взаимной индуктивности М12 обмоток w1 иw2, а значит, и амплитуды переменного напряжения на выходе.
Преобразователь, изображенный на рис. 7, б, отличается тем, что имеет дифференциальную конструкцию: его выходные обмотки включены встречно. Он состоит из двух одинаковых частей, поэтому, когда не происходит смещение якоря (подвижного сердечника) относительно неподвижных частей магнитопровода, в выходных обмотках w1 та w2 индуцируются одинаковые ЭДС. Встречное соединение обмоток w1 та w2 приводит к тому, что выходной сигнал Uвих преобразователя рамен нулю. При смещении якоря в ту либо другую сторону в одной магнитной цепи поток возростает, так как уменьшается магнитное сопротивление, а в другой магнитной цепи магнитный поток уменьшается. Соответственно, в одной выходной обмотке ЭДС увеличивается, а в другой – уменьшается. Суммарная ЭДС последовательно соединенных выходных обмоток пропорциональна перемещению х подвижного сердечника.
4. Принцип действия тепловых преобразователей основан на использовании тепловых процессов (нагрева, охлаждения, теплообмена), входной величиной которых является температура.
Тепловые преобразователи используются не только как преобразователи температур, но и теплового потока, скорости потока, расхода, химического состава, давления газов, влажности и т. д.
Температура как параметр не поддается непосредственному измерению, но она непосредственно связана с внутренней энергией тел, и через нее с физическими свойствами.
Физические явления:
1. Тепловое расширение газов (водород, гелий, азот, воздух ∆Τ=1ч10К); жидкостей (∆Τ=200ч1200К — ртуть); твердых тел (∆Τ=200ч650К).
2. Зависимость шумового напряжения UШ на резисторе от температуры (∆Τ=4ч1800К).
3. Изменение модуля упругости пьезоэлектриков от температуры (∆Τ=10ч500К).
4. Термо -ЭДС.
5. Зависимость сопротивления от температуры
Разновидности тепловых преобразователей:
1. Термоэлектрические преобразовательные элементы.
2. Терморезисторы: бывают металлические, полупроводниковые.
3. Термодиоды и термотранзисторы.
4. Другие типы: термочувствительные пьезорезонаторы, пироэлектрические преобразователи, сегнетокерамические и емкостные преобразователи.
Контрольные вопросы:
1. Измерительный преобразователь мы очень часто называем датчиком. Существует ли различие между этими двумя понятиями?
2. Как классифицируются измерительные преобразователи?
3. Какие преобразователи являются электромагнитными? Их виды?
4. Какие виды тепловых измерительных преобразователей Вы знаете?
Вопросы для самостоятельного изучения:
1. Выучить определения.
2. Составить краткий конспект: принципы действия тепловых преобразователей разных типов.
Литература:
Дата добавления: 2021-03-18; просмотров: 178; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!